turtlebot2基于hokuyo激光的amcl+move_bace导航
1、文件配置
1)打开一个新终端,配置ROS环境变量(每开新的终端都最好配置一次)
$ source ~/catkin_ws/devel/setup.bash
2)修改激光串口权限,注意:每次USB重新插入都需要修改该权限
$ sudo chmod a+rw /dev/ttyACM0
3)手动打开hokuyo_laser.launch(路径:/home/yourname/catkin_ws/src/turtlebot_apps/turtlebot_navigation/laser/driver)并添加tf变换(这里会有两个tf变换才能运行,具体原因不明)
<node pkg="tf" type="static_transform_publisher" name="map_to_odom" args="0.0 0.0 0.17 0 0 0.0 /map /odom 1000"/>
这个launch的完整文件为:
<!--
This launch file shows how to start a hokuyo node.
You may have to change the port parameter if your laser is not at
/dev/ttyACM0.
If you have rviz built, you can uncomment the rviz node to visualize the
laser data.
Otherwise, you can use rostopic to see the data:
rostopic echo /scan
-->
<launch>
<node name="hokuyo" pkg="hokuyo_node" type="hokuyo_node" respawn="false" output="screen">
<!-- Starts up faster, but timestamps will be inaccurate. -->
<param name="calibrate_time" type="bool" value="false"/>
<!-- Set the port to connect to here -->
<param name="port" type="string" value="/dev/hokuyo"/>
<param name="frame_id" type="string" value="laser"/>
<param name="intensity" type="bool" value="false"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.0 0.0 0.17 0 0.0 0.0 base_link laser 100"/>
<node pkg="tf" type="static_transform_publisher" name="map_to_odom" args="0.0 0.0 0.17 0 0 0.0 /map /odom 1000"/>
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen" args="-d $(find hokuyo_node)/hokuyo_test.vcg"/>
</launch>
4)创建hokuyo_amcl_demo.launch
$ roscd turtlebot_navigation
$ touch launch/hokuyo_amcl_demo.launch
打开,并添加以下内容:
<launch>
<!-- Define laser type-->
<arg name="laser_type" default="hokuyo" />
<!-- laser driver -->
<include file="$(find turtlebot_navigation)/laser/driver/$(arg laser_type)_laser.launch"/>
<!-- Map server -->
<arg name="map_file" default="$(env TURTLEBOT_MAP_FILE)"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<!-- AMCL -->
<arg name="custom_amcl_launch_file" default="$(find turtlebot_navigation)/launch/includes/amcl/$(arg laser_type)_amcl.launch.xml"/>
<arg name="initial_pose_x" default="0.0"/> <!-- Use 17.0 for willow's map in simulation -->
<arg name="initial_pose_y" default="0.0"/> <!-- Use 17.0 for willow's map in simulation -->
<arg name="initial_pose_a" default="0.0"/>
<include file="$(arg custom_amcl_launch_file)">
<arg name="initial_pose_x" value="$(arg initial_pose_x)"/>
<arg name="initial_pose_y" value="$(arg initial_pose_y)"/>
<arg name="initial_pose_a" value="$(arg initial_pose_a)"/>
</include>
<!-- Move base -->
<arg name="custom_param_file" default="$(find turtlebot_navigation)/param/$(arg laser_type)_costmap_params.yaml"/>
<include file="$(find turtlebot_navigation)/launch/includes/move_base.launch.xml">
</include>
</launch>
此处<arg name="custom_param_file" default="$(find turtlebot_navigation)/param/$(arg laser_type)_costmap_params.yaml"/> 经测试有无均可,原因不明。
2、导航实现
1)上网本新开端口,打开roscore
$ roscore
2)上网本新开端口,启动turtlebot
$ roslaunch turtlebot_bringup minimal.launch
3)主机,新终端执行,启动amcl
$ roslaunch turtlebot_navigation hokuyo_amcl_demo.launch map_file:=/home/yourname/map/hokuyo_map.yaml
这里/home/yourname/map/hokuyo_map.yaml是所建地图的.yaml文件所在的位置,需按个人情况改变
如果你看到 odom received! 说明已经正常运行。
过程中可能出现报错,原因不明,但是不影响正常运行。
4)新终端,启动rviz
$ roslaunch turtlebot_rviz_launchers view_navigation.launch --screen
效果如下图:
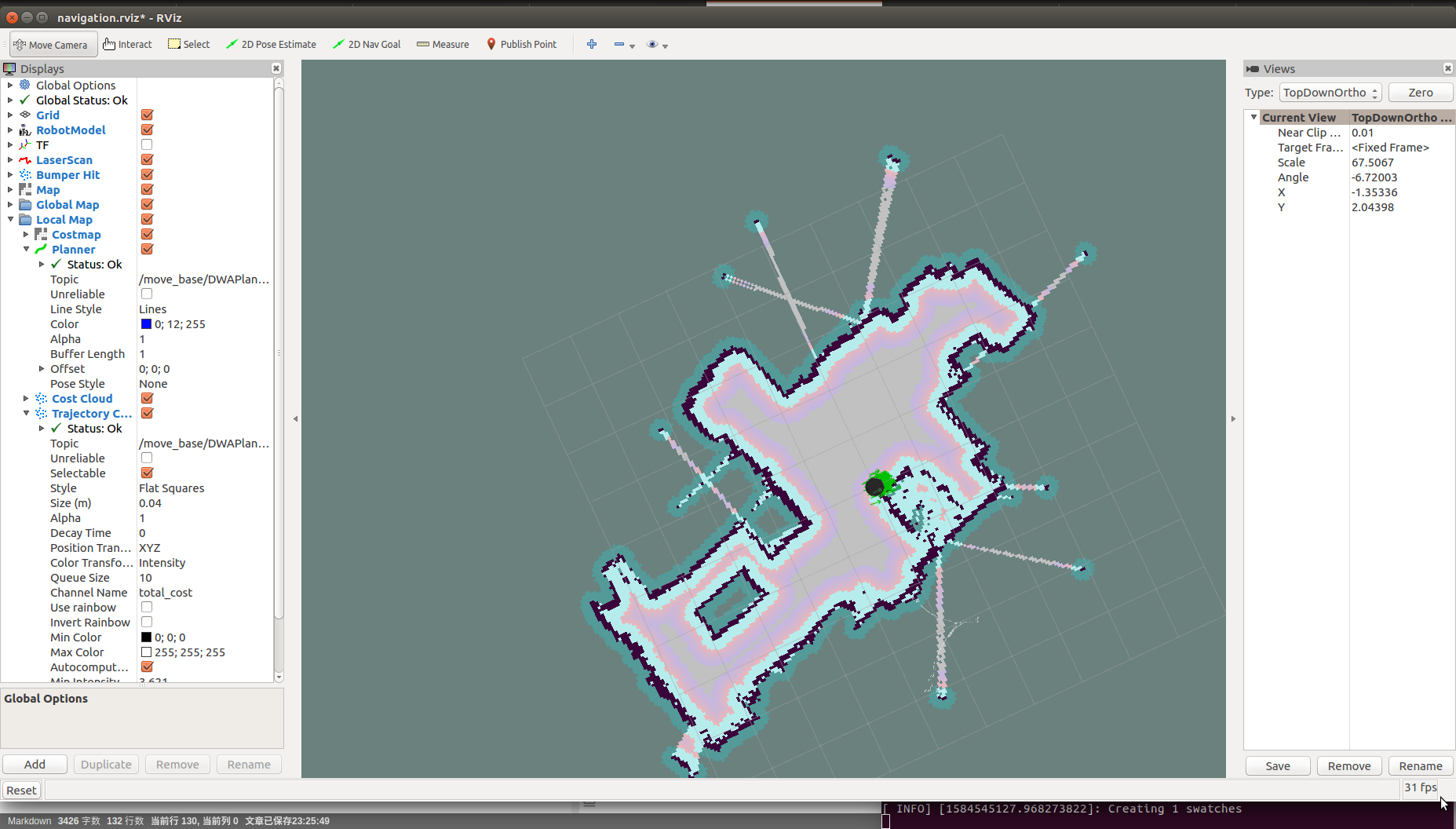 rviz应该公开展示你的地图。turtlebot不能够估计在启动姿态,尽管它可以在你初始化它的姿态。
rviz应该公开展示你的地图。turtlebot不能够估计在启动姿态,尽管它可以在你初始化它的姿态。
选择“2D Pose Estimate”在地图上的turtlebot位置点击并按住。当你握着鼠标的时候,一个箭头会出现在鼠标指针的下方,用这个来估计它的方向。
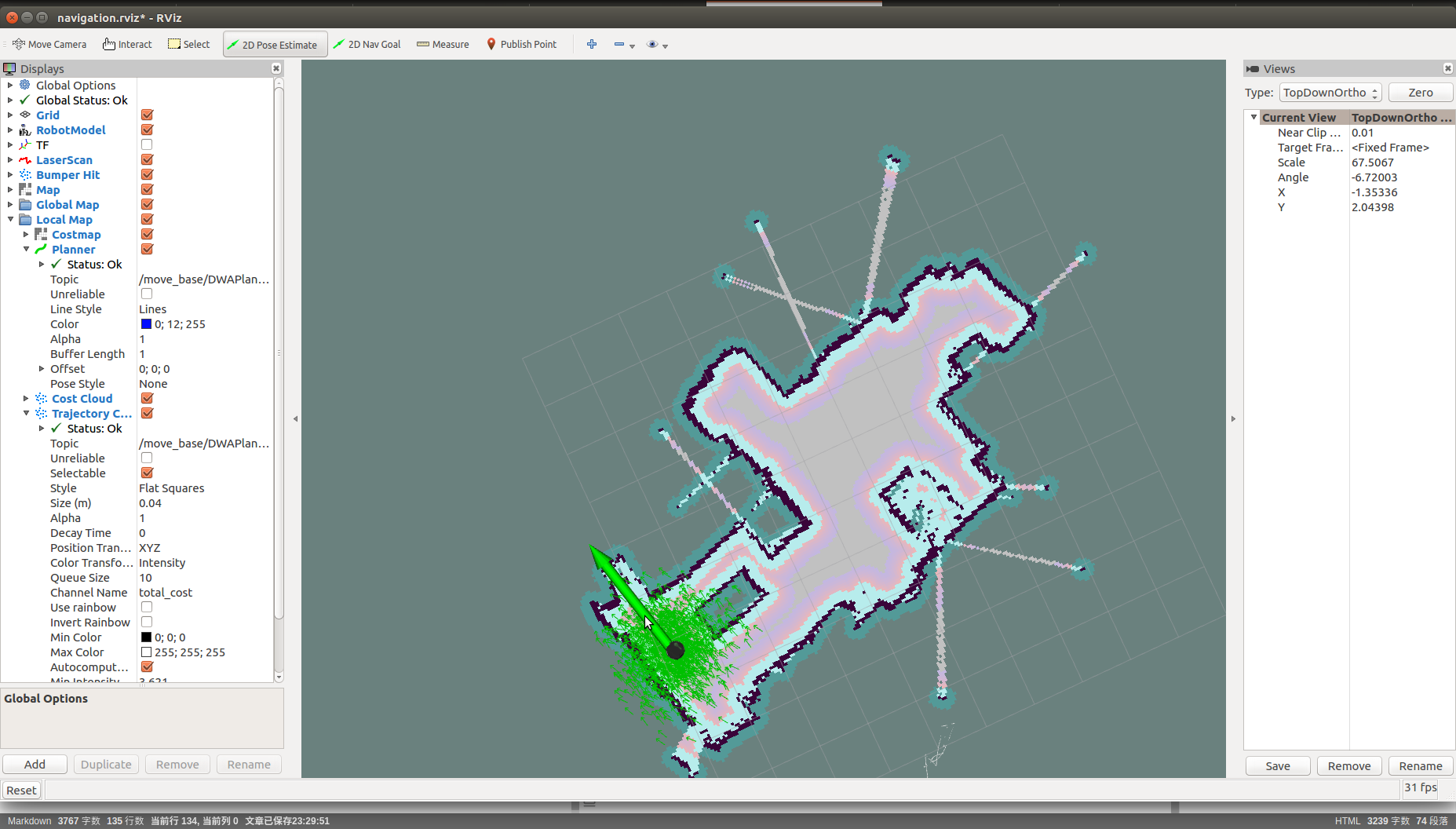
设置后估计的姿态,选择“2D Nav Goal”,点击你想让turtlebot去的地方。您还可以指定一个目标方向,使用相同的技术如“2D Pose Estimate”。
urtlebot现在应该朝着你的目录自主前进。尝试指定一个目标,并走在前面,看看它如何反应的动态障碍。
当turtlebot到达指定地点之后,会显示,Goal reached.
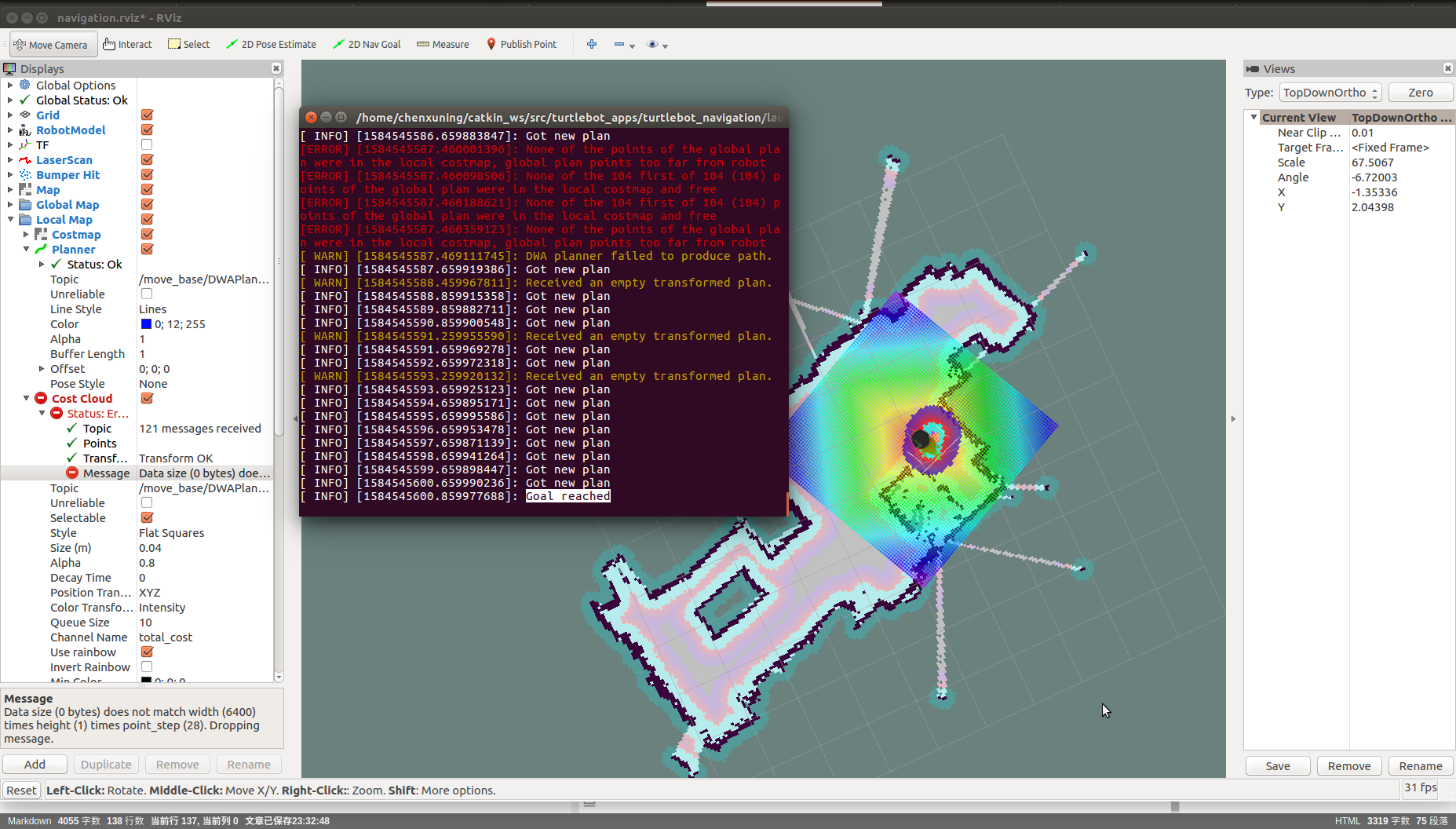
rviz中会有一些错误出现,原因不明。
3、仍存在的问题
1)turtlebot目前在遇到动态障碍时,无法提前避障,需要撞上去,并需要较长的时间来寻找可以走的方向
2)目前turtlebot在导航过程中,rviz界面会出现机器人不断跳出再返回的情况
3)导航过程中出现的报错尚未解决,并不知道其对导航规程的影响
4)hokuyo_laser.launch中<arg name="custom_param_file" default="$(find turtlebot_navigation)/param/$(arg laser_type)_costmap_params.yaml"/> 作用尚不明晰
最后
以上就是繁荣季节最近收集整理的关于Ubuntu16.04+hokuyo(URG)实现amcl导航的全部内容,更多相关Ubuntu16内容请搜索靠谱客的其他文章。






![cannot launch node of type [map_server/map_server]: can't locate node [map_server] in packageERROR: cannot launch node of type [map_server/map_server]: can't locate node [map_server] in package](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)

发表评论 取消回复