查找专题
- 查找的概念
- 查找表操作⽅方式分类(静态/动态)
- 顺序表查找(Sequential Search)
- 代码实现
- 优化(增加哨兵,将key存储在a[0])
- 折半查找(Binary Search)
- 代码实现
- 查找范围优化(插值查找)
- 斐波拉契查找(Fibonacci Search)
- 代码实现
- 有序查找-总结
- 动态查找表
- 二叉排序树(Binary Sort Tree)
- ⼆叉排序树(Binary Sort Tree) — 树结构定义
- 二叉排序树(Binary Sort Tree) — 查找操作代码实现
- 二叉排序树(Binary Sort Tree) — 插入操作代码实现
- 二叉排序树(Binary Sort Tree) — 删除操作
- 插入删除代码综合
查找的概念
查找(Searching): 就是根据给定的某个值,在查找表中确定⼀一个其关键字等于给定值 的数据元素。
**查找表(Search Table)**是由同一类型的数据元素(记录)构成的集合。
**关键字(Key)**是数据元素中某个数据项的值.又称为键值. ⽤用它可 以表示一个数据元素,也可以标识一个记录的某个数据项(字段). 我们称为关键码。
若关键字可以唯一地标识一个记录, 则称此关键字为主关键字 (Primary Key)。
对于那些可以识别多个属于元素(记录)的关键字,我们称为次关键 字(Secondary Key)。
查找表操作⽅方式分类(静态/动态)
静态查找表(Static Search Table): 只作查找操作的查找表;
-
查询某个”特定的”数据元素是否在查找表中;
-
检索某个"特定的"数据元素和各种属性;
动态查找表(Dynamic Search Table): 在查找过程中同时插⼊入查找表中不不存在的数据元素, 或者从查找表中删除已经存在的某个数据元素; 显然动态查找表的操作就是2个动作。
- 查找时插⼊数据元素;
- 查找时删除数据元素;
顺序表查找(Sequential Search)
顺序查找(Sequential Search), 又称为线性查找. 是最基本的查找技术. 它的查找过程: 从表中的第一个(或最后一个)记录开始,逐个进行记录关键 字和给定值比较;
- 若某个记录的关键字和给定值相等,则查找成功,找到所查记录;
- 如果直到最后一个(或第一个)记录, 其关键字和给定值比较都不等 时, 则表中没有所查的记录,查找不成功;
代码实现
//1.顺序查找
//a为数组,n为查找的数组个数,key为要查找的关键字;
int Sequential_Search(int *a,int n,int key){
for (int i = 1; i <= n ; i++)
if (a[i] == key)
return i;
return 0;
}
优化(增加哨兵,将key存储在a[0])
//2.顺序查找_哨兵
int Sequential_Search2(int *a,int n,int key){
int i;
//设置a[0]为关键字值,称为'哨兵'
a[0] = key;
//循环从数组尾部开始
i = n;
while (a[i] != key) {
i--;
}
//返回0,则说明查找失败
return i;
}
折半查找(Binary Search)
折半查找(Binary Search)技术,又称为二分查找.
它的前提是线性表中的记录必须是关键码有序(通常是从小到⼤有序),线性表必须采⽤用顺序存储;
折半查找的基本思想是:
- 在有序表中,取中间记录作为⽐较对象,若给定值与中间记录的关键字相 等则查找成功;
- 若给定值小于中间的记录关键字,则在中间记录的左半区继续查找;
- 若给定的值大于中间记录的关键字,则在中间记录的右半区继续查找;
- 不断重复以上的过程,直到查找成功,或所以查找区域⽆记录,查找失败为止.
代码实现
//假设数组a,已经是有序的(从小到大)
int Binary_Search(int *a,int n,int key){
int low,high,mid;
//定义最低下标为记录首位
low = 1;
//定义最高下标为记录末位
high = n;
while (low <= high) {
//折半计算
mid = (low + high) /2;
if (key < a[mid]) {
//若key比a[mid] 小,则将最高下标调整到中位下标小一位;
high = mid-1;
}else if(key > a[mid]){
//若key比a[mid] 大,则将最低下标调整到中位下标大一位;
low = mid+1;
}else
//若相等则说明mid即为查找到的位置;
return mid;
}
return 0;
}
查找范围优化(插值查找)
插值查找(Interpolation Search):是根据查找的关键字key 与查找表中最大最⼩记录的关键字⽐比较后的查找方法, 其核心 就是在于插值的计算公式:

#####代码实现
int Interpolation_Search(int *a,int n,int key){
int low,high,mid;
low = 1;
high = n;
while (low <= high) {
//插值
mid = low+ (high-low)*(key-a[low])/(a[high]-a[low]);
if (key < a[mid]) {
//若key比a[mid]插值小,则将最高下标调整到插值下标小一位;
high = mid-1;
}else if(key > a[mid]){
//若key比a[mid]插值 大,则将最低下标调整到插值下标大一位;
low = mid+1;
}else
//若相等则说明mid即为查找到的位置;
return mid;
}
return 0;
}
斐波拉契查找(Fibonacci Search)
代码实现
//5.斐波拉契查找
int F[100]; /* 斐波那契数列 */
int Fibonacci_Search(int *a,int n,int key){
int low,high,mid,i,k;
//最低下标为记录的首位;
low = 1;
//最高下标为记录的末位;
high = n;
k = 0;
//1.计算n为斐波拉契数列的位置;
while (n > F[k]-1) {
k++;
}
//2.将数组a不满的位置补全值;
for(i = n;i < F[k]-1;i++)
a[i] = a[n];
//3.
while (low <= high) {
//计算当前分隔的下标;
mid = low+F[k-1]-1;
if (key < a[mid]) {
//若查找的记录小于当前分隔记录;
//将最高下标调整到分隔下标mid-1处;
high = mid-1;
//斐波拉契数列下标减1位;
k = k-1;
}else if(key > a[mid]){
//若查找的记录大于当前的分隔记录;
//最低下标调整到分隔下标mid+1处
low = mid+1;
//斐波拉契数列下标减2位;
k = k-2;
}else{
if (mid <= n) {
//若相等则说明,mid即为查找的位置;
return mid;
}else
{
//若mid>n,说明是补全数值,返回n;
return n;
}
}
}
return 0;
}
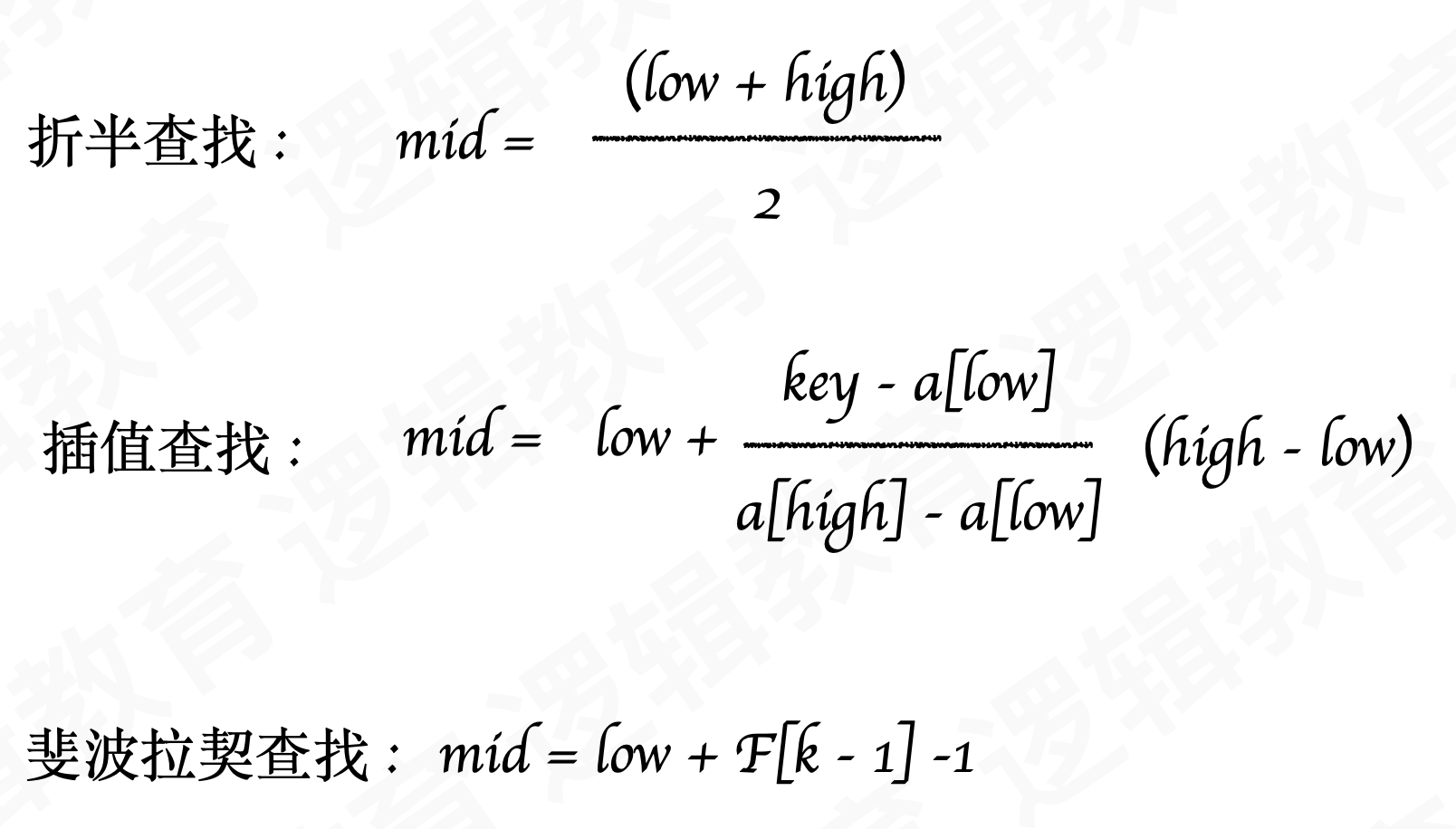
有序查找-总结
这几种查找方式只是每次选择的范围不同,其公式总结如下:
动态查找表
二叉排序树(Binary Sort Tree)
二叉排序树(Binary Sort Tree),又称为二叉查找树. 它或者是一颗空树.或者是一颗具有下列性质的二叉树;
- 若它的左子树不空,则左子树上所有结点的值均小于它的根结构的值;
- 若它的右子树不空,则右子树上的所有结点的值均大于它的根结点的值;
- 它的左右子树也分别是二叉排序树;
⼆叉排序树(Binary Sort Tree) — 树结构定义

二叉排序树(Binary Sort Tree) — 查找操作代码实现
//1.二叉排序树--查找
/*
递归查找二叉排序树T中,是否存在key;
指针f指向T的双亲,器初始值为NULL;
若查找成功,则指针p指向该数据元素的结点,并且返回TRUE;
若指针p指向查找路径上访问的最后一个结点则返回FALSE;
*/
Status SearchBST(BiTree T,int key,BiTree f, BiTree *p){
if (!T) /* 查找不成功 */
{
*p = f;
return FALSE;
}
else if (key==T->data) /* 查找成功 */
{
*p = T;
return TRUE;
}
else if (key<T->data)
return SearchBST(T->lchild, key, T, p); /* 在左子树中继续查找 */
else
return SearchBST(T->rchild, key, T, p); /* 在右子树中继续查找 */
}
二叉排序树(Binary Sort Tree) — 插入操作代码实现
//2.二叉排序树-插入
/* 当二叉排序树T中不存在关键字等于key的数据元素时, */
/* 插入key并返回TRUE,否则返回FALSE */
Status InsertBST(BiTree *T, int key) {
BiTree p,s;
//1.查找插入的值是否存在二叉树中;查找失败则->
if (!SearchBST(*T, key, NULL, &p)) {
//2.初始化结点s,并将key赋值给s,将s的左右孩子结点暂时设置为NULL
s = (BiTree)malloc(sizeof(BiTNode));
s->data = key;
s->lchild = s->rchild = NULL;
//3.
if (!p) {
//如果p为空,则将s作为二叉树新的根结点;
*T = s;
}else if(key < p->data){
//如果key<p->data,则将s插入为左孩子;
p->lchild = s;
}else
//如果key>p->data,则将s插入为右孩子;
p->rchild = s;
return TRUE;
}
return FALSE;
}
二叉排序树(Binary Sort Tree) — 删除操作
//3.从二叉排序树中删除结点p,并重接它的左或者右子树;
Status Delete(BiTree *p){
BiTree temp,s;
if((*p)->rchild == NULL){
//情况1: 如果当前删除的结点,右子树为空.那么则只需要重新连接它的左子树;
//①将结点p临时存储到temp中;
temp = *p;
//②将p指向到p的左子树上;
*p = (*p)->lchild;
//③释放需要删除的temp结点;
free(temp);
}else if((*p)->lchild == NULL){
//情况2:如果当前删除的结点,左子树为空.那么则只需要重新连接它的右子树;
//①将结点p存储到temp中;
temp = *p;
//②将p指向到p的右子树上;
*p = (*p)->rchild;
//③释放需要删除的temp结点
free(temp);
}else{
//情况③:删除的当前结点的左右子树均不为空;
//①将结点p存储到临时变量temp, 并且让结点s指向p的左子树
temp = *p;
s = (*p)->lchild;
//②将s指针,向右到尽头(目的是找到待删结点的前驱)
//-在待删除的结点的左子树中,从右边找到直接前驱
//-使用`temp`保存好直接前驱的双亲结点
while (s->rchild) {
temp = s;
s = s->rchild;
}
//③将要删除的结点p数据赋值成s->data;
(*p)->data = s->data;
//④重连子树
//-如果temp 不等于p,则将S->lchild 赋值给temp->rchild
//-如果temp 等于p,则将S->lchild 赋值给temp->lchild
if(temp != *p)
temp->rchild = s->lchild;
else
temp->lchild = s->lchild;
//⑤删除s指向的结点; free(s)
free(s);
}
return TRUE;
}
插入删除代码综合
//4.查找结点,并将其在二叉排序中删除;
/* 若二叉排序树T中存在关键字等于key的数据元素时,则删除该数据元素结点, */
/* 并返回TRUE;否则返回FALSE。 */
Status DeleteBST(BiTree *T,int key)
{
//不存在关键字等于key的数据元素
if(!*T)
return FALSE;
else
{
//找到关键字等于key的数据元素
if (key==(*T)->data)
return Delete(T);
else if (key<(*T)->data)
//关键字key小于当前结点,则缩小查找范围到它的左子树;
return DeleteBST(&(*T)->lchild,key);
else
//关键字key大于当前结点,则缩小查找范围到它的右子树;
return DeleteBST(&(*T)->rchild,key);
}
}
最后
以上就是动人煎蛋最近收集整理的关于关于查找的有哪些常见算法?的全部内容,更多相关关于查找内容请搜索靠谱客的其他文章。








发表评论 取消回复