BStarFindPath
- 欢迎了解BStar寻路算法
- 想象空间
- BStar寻路的优势
- BStar寻路的劣势
- 路径优化的方案
- 空间优化的方案
欢迎了解BStar寻路算法
BStar算法归于人工智能或人工生命一类,是让对象呈现出拥有生命一般,朝着目标点移动并绕开障碍物,如果目标点被障碍物包围则停留在附近点。
想象空间
可以将BStar寻路想象成一个朝目标前进的贪吃蛇,如果遇到障碍就会分裂成2条贪吃蛇,一左一右绕开障碍,绕开障碍后继续向目标点移动,只要有一条蛇到达目标点即寻路结束。
这里我们需要三类蛇来满足我们的设计需求:
- 自由蛇(向目标点前进,遇到障碍会分裂成左转蛇和右转蛇)
- 左转蛇(只考虑绕着障碍左转,一直到绕出障碍变成自由蛇或者遇到已经绕过的路消失)
- 右转蛇(只考虑绕着障碍右转,一直到绕出障碍变成自由蛇或者遇到已经绕过的路消失)
可以想象在复杂的地形下,会出现很多蛇,最终先到终点的蛇就是我们要找的路径。
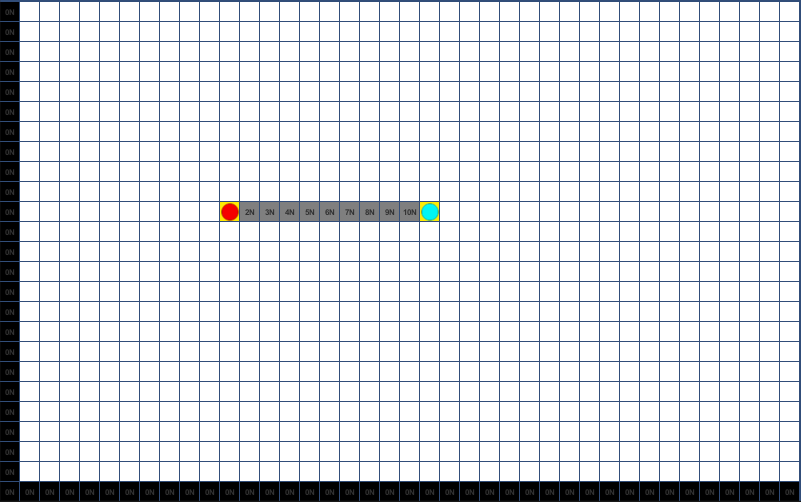
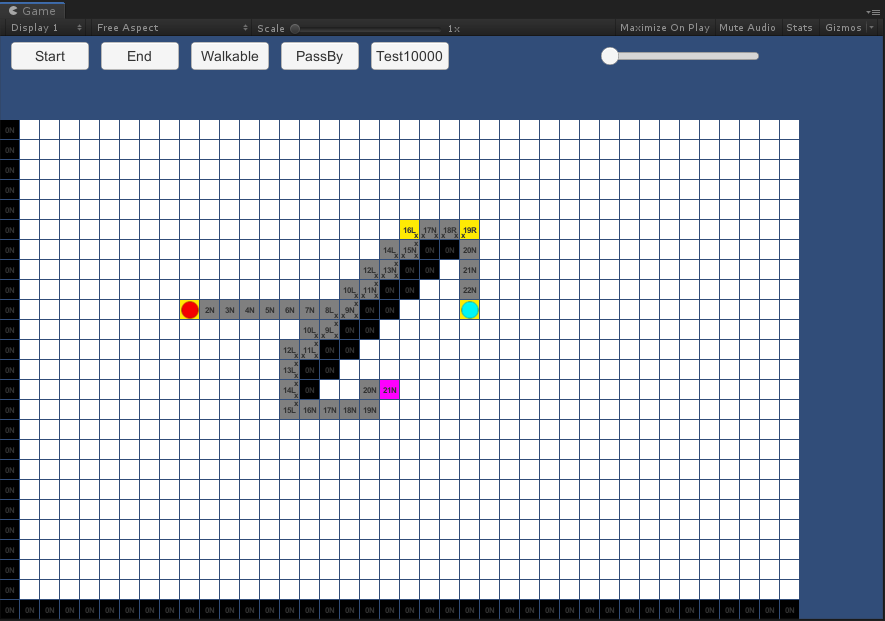
下图只有自由蛇 (2N - 10N) N代表自由蛇
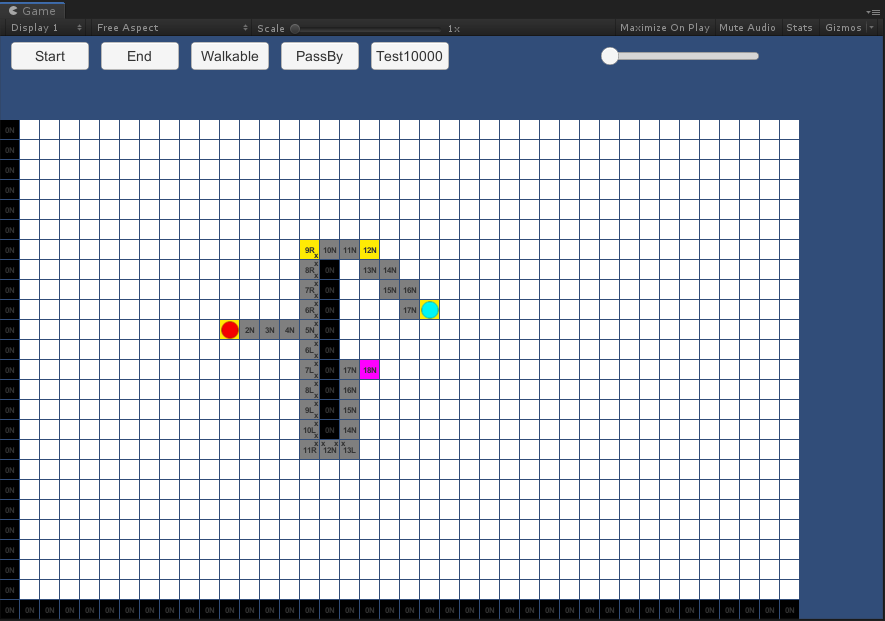
下图开始是自由蛇(2N-5N)撞墙后变成了左转蛇和右转蛇绕开障碍,绕开后变成自由蛇奔向终点。
BStar寻路的优势
目标点在封闭空间内时,BStar效率优势明显
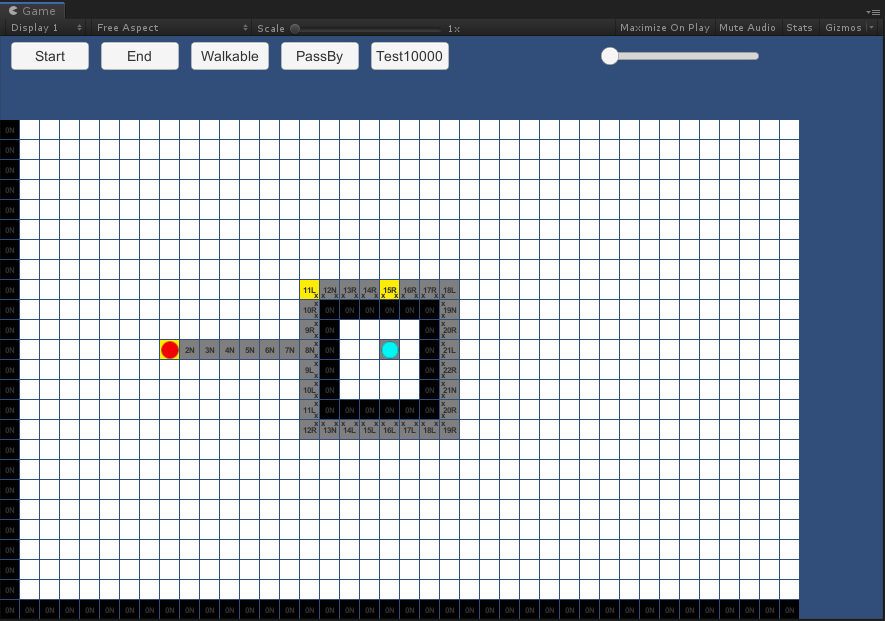
目标点在需要绕路的空间内时,BStar效率优势明显
BStar寻路的劣势
贴近障碍走的问题严重,特别喜欢贴墙走。上文提到BStar算法归于人工智能或人工生命一类在此处可见一斑,大家仔细观察生活中很多人虽然绕路也是喜欢贴墙走的。
仔细观察灰色部分BStar的原始寻路数据,不难发现贴着墙走的问题严重。
大局观的缺失,因为BStar寻到的不是最优解
路径优化的方案
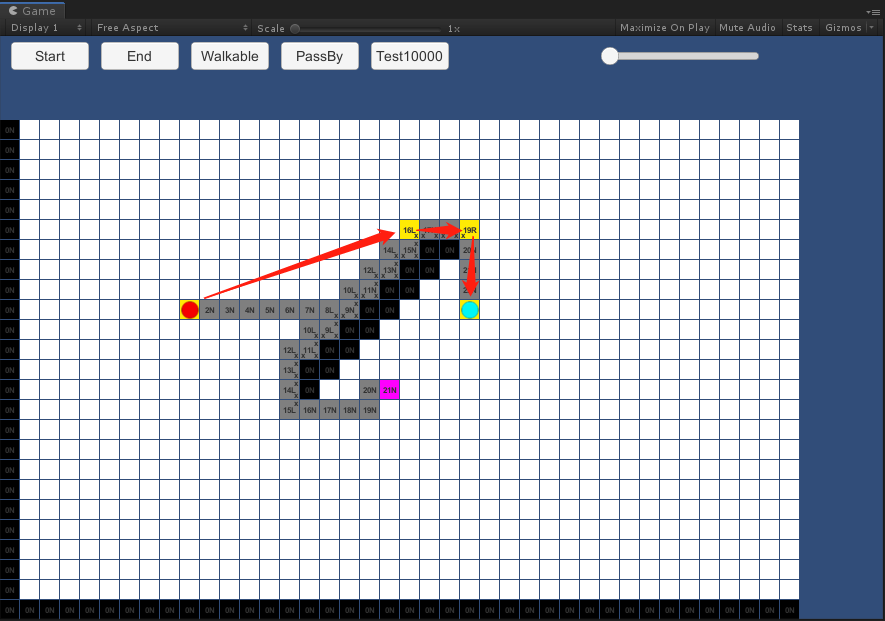
1、对寻得的原始路径进行smooth处理,提取其中的可行关键点以减少贴墙的问题
下图中黄色的点为关键路径点
if (bstar_finded_src_way.Count >= 2)
{
WayNode a = bstar_finded_src_way[L];
pricallback_finded_one_way.path_way.Add(a);
while (find_next == 1)
{
find_next = 0;
for (int j = L + 17; j > L; j--)
{
if (j >= bstar_finded_src_way.Count) continue;
WayNode b = bstar_finded_src_way[j];
if (CheckPathLine(a, b) == true)
{
a = b;
L = j;
find_next = 1;
pricallback_finded_one_way.path_way.Add(a);
break;
}
}
}
}
public void SmoothPath()
{
//Husunren 再次优化路径smooth处理,计算可达性,去掉中间的点
int L = 0, ans = 0; //Husunren 这里的ans是为了迭代过深造成的性能问题的优化
while (L + 2 < path_way.Count)
{
WayNode a = path_way[L];
WayNode b = path_way[L + 1];
WayNode c = path_way[L + 2];
if (ans < 7 && BStarPath.CheckOtherAnglePathLine(a, c) == true)
{
path_way.Remove(b);
ans++;
}
else
{
L++;
ans = 0;
}
}
}
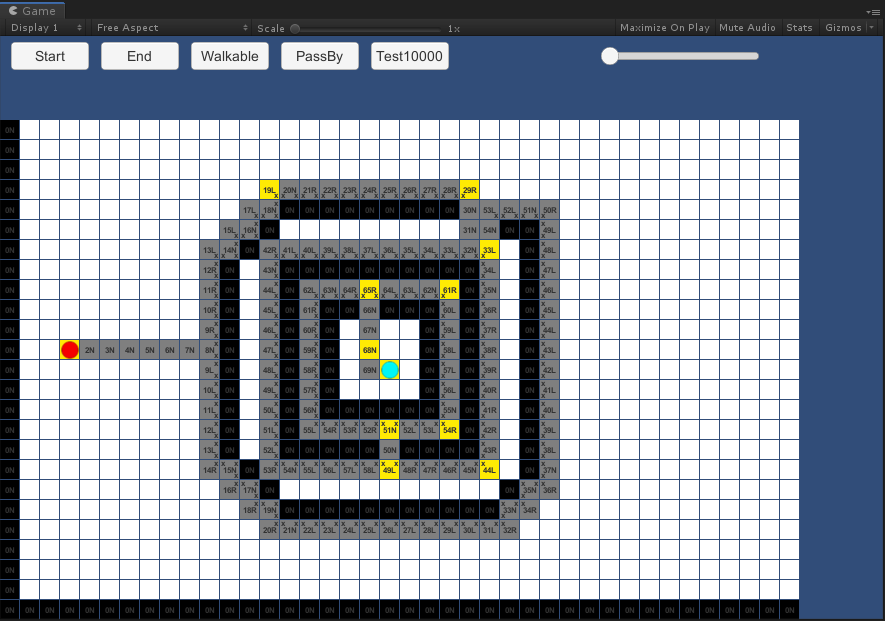
2、对于BStar寻路没有大局观的优化,可以加入途径点的概念,上层先进行一次大致位置的寻路,再由BStar来负责细致的寻路。
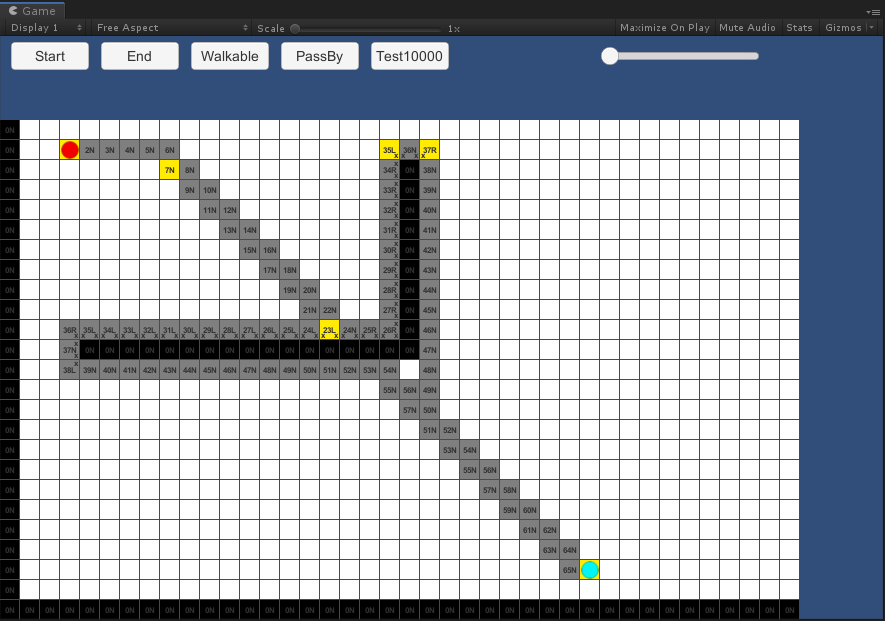
下图是1000,000个格子的大世界寻路,先进行一次洲的寻路计算出路径点,再由BStar进行点到点之间的寻路

大家可以看到在1000x1000的地图中,从左上寻路到右下,耗时是2ms左右,证明了BStar寻路性能的优越。
空间优化的方案
在格子数量过多的情况下,我们需要对寻路的数据进行压缩以达到比较合理的空间利用。
这里我采用了位压里处理。将1,000,000个格子的数据压到4mb的内存中,以减少内存的浪费。
public struct BPathCell
{
public int Reset_data;
const int ResetData_Road_LT_Offset = 0;
const int ResetData_Road_LT_Mask = 0x1 << ResetData_Road_LT_Offset;
const int ResetData_Road_LB_Offset = 1;
const int ResetData_Road_LB_Mask = 0x1 << ResetData_Road_LB_Offset;
const int ResetData_Road_RB_Offset = 2;
const int ResetData_Road_RB_Mask = 0x1 << ResetData_Road_RB_Offset;
const int ResetData_Road_RT_Offset = 3;
const int ResetData_Road_RT_Mask = 0x1 << ResetData_Road_RT_Offset;
const int ResetData_BackDir_Offset = 12;
const int ResetData_BackDir_Mask = 3 << ResetData_BackDir_Offset;
public int back_dir
{
get
{
return ((Reset_data & ResetData_BackDir_Mask) >> ResetData_BackDir_Offset);
}
set
{
unchecked { Reset_data = ((Reset_data & ~ResetData_BackDir_Mask) | (value << ResetData_BackDir_Offset)); }
}
}
const int ResetData_g_Offset = 16;
const int ResetData_g_Mask = 0xFFFF << ResetData_g_Offset;
public int g
{
get
{
return ((Reset_data & ResetData_g_Mask) >> ResetData_g_Offset);
}
set
{
unchecked { Reset_data = ((Reset_data & ~ResetData_g_Mask) | (value << ResetData_g_Offset)); }
}
}
public int road_LT
{
get
{
return ((Reset_data & ResetData_Road_LT_Mask) >> ResetData_Road_LT_Offset);
}
set
{
unchecked { Reset_data = (int)((Reset_data & ~ResetData_Road_LT_Mask) | (value << ResetData_Road_LT_Offset)); }
}
}
................
}
作者:胡孙仁
Author: HuSunren(FD.Creator) QQ: 75567044
email: aveking@qq.com aveking@163.com
Copyright © 2020 tel: 18616334412
最后
以上就是朴实指甲油最近收集整理的关于Unity实现BStar寻路欢迎了解BStar寻路算法想象空间BStar寻路的优势BStar寻路的劣势路径优化的方案空间优化的方案的全部内容,更多相关Unity实现BStar寻路欢迎了解BStar寻路算法想象空间BStar寻路内容请搜索靠谱客的其他文章。








发表评论 取消回复