改写代码地址
基于开学初用Windows下的vs2019的框架改了改,基本工程搭建过程见:vs2019+VREP 基本工程框架
借用vrep界面展示规划的路径,vrep主要是记录robot的轨迹,robot的位置由c++程序直接设置,vrep类的定义如下:
vrep.h
#pragma once
#include"extApi.h"
#include"simConst.h"
#include"extApiPlatform.h"
#include <math.h>
#include <iostream>
#include <vector>
namespace vrepspace
{
class vrep
{
public:
void vrep_connect(const char* ip);
void vrep_start();
void vrep_stop();
void vrep_setpose2d(int handle, float x, float y);
void getobjectpos(int handle, float* pos);
int client_id;
int robot_handle;
int goal_handle;
};
}
vrep.c
#include "vrep.h"
namespace vrepspace
{
using namespace std;
void vrep::vrep_connect(const char* ip)
{
int Port = 19997;
client_id = simxStart((simxChar*)ip, Port, 1, 1, 1000, 5);
vrep_stop();
extApi_sleepMs(100);
if (client_id != -1)
{
cout << "V-rep connected.";
simxGetObjectHandle(client_id, "robot", &robot_handle, simx_opmode_blocking);
simxGetObjectHandle(client_id, "goal", &goal_handle, simx_opmode_blocking);
}
else
{
cout << "V-rep can't be connected.";
}
}
void vrep::vrep_start()
{
simxStartSimulation(client_id, simx_opmode_oneshot);
cout << "simulation started ...... " << endl;
extApi_sleepMs(100);
}
void vrep::vrep_stop()
{
simxStopSimulation(client_id, simx_opmode_oneshot);
}
void vrep::vrep_setpose2d(int handle, float x, float y)
{
float position[3] = { x, y, 0 };
simxSetObjectPosition(client_id, (simxInt)handle, -1, position,simx_opmode_oneshot);
}
void vrep::getobjectpos(int handle, float* pos)
{
simxGetObjectPosition(client_id, handle, -1, pos, simx_opmode_blocking);
extApi_sleepMs(50);
}
}
路径规划部分直接copy的ompl官网的 这个demo
里面的main函数当然要挪到自己的main.c里面去,另外Plane2DEnvironment类里面新增一个drawPath函数,在main.h里面定义,作用是在vrep里面移动位置
Plane2DEnvironment.h如下,路径规划只有一个头文件就够了
#pragma once
#include <ompl/base/spaces/RealVectorStateSpace.h>
#include <ompl/geometric/SimpleSetup.h>
#include <ompl/geometric/planners/rrt/RRTstar.h>
#include <ompl/geometric/planners/rrt/RRTConnect.h>
#include <ompl/geometric/planners/prm/PRMstar.h>
#include <ompl/util/PPM.h>
#include <ompl/base/samplers/DeterministicStateSampler.h>
#include <ompl/base/samplers/deterministic/HaltonSequence.h>
#include <ompl/config.h>
#include <boost/filesystem.hpp>
#include <iostream>
namespace ob = ompl::base;
namespace og = ompl::geometric;
class Plane2DEnvironment
{
public:
Plane2DEnvironment(const char* ppm_file, bool use_deterministic_sampling = false)
{
bool ok = false;
useDeterministicSampling_ = use_deterministic_sampling;
try
{
ppm_.loadFile(ppm_file);
ok = true;
}
catch (ompl::Exception& ex)
{
OMPL_ERROR("Unable to load %s.n%s", ppm_file, ex.what());
}
if (ok)
{
auto space(std::make_shared<ob::RealVectorStateSpace>());
space->addDimension(0.0, ppm_.getWidth());//x轴长度即图片宽像素数
space->addDimension(0.0, ppm_.getHeight());//y轴长度即图片高像素数
maxWidth_ = ppm_.getWidth() - 1;//可行路径不能在边界上?
maxHeight_ = ppm_.getHeight() - 1;
ss_ = std::make_shared<og::SimpleSetup>(space);//初始化采样空间即构型空间?状态空间
// set state validity checking for this space
ss_->setStateValidityChecker([this](const ob::State* state) { return isStateValid(state); });
space->setup();
ss_->getSpaceInformation()->setStateValidityCheckingResolution(1.0 / space->getMaximumExtent());
// set the deterministic sampler
// 2D space, no need to specify bases specifically
if (useDeterministicSampling_)
{
// PRMstar can use the deterministic sampling
ss_->setPlanner(std::make_shared<og::PRMstar>(ss_->getSpaceInformation()));//渐进最优的概率路线图*算法
space->setStateSamplerAllocator(std::bind(&Plane2DEnvironment::allocateHaltonStateSamplerRealVector,
this, std::placeholders::_1, 2,
std::vector<unsigned int>{2, 3}));
}
}
}
bool plan(unsigned int start_row, unsigned int start_col, unsigned int goal_row, unsigned int goal_col)
{
if (!ss_)
return false;
ob::ScopedState<> start(ss_->getStateSpace());
start[0] = start_row;
start[1] = start_col;
ob::ScopedState<> goal(ss_->getStateSpace());
goal[0] = goal_row;
goal[1] = goal_col;
ss_->setStartAndGoalStates(start, goal);
// generate a few solutions; all will be added to the goal;
for (int i = 0; i < 10; ++i)
{
if (ss_->getPlanner())
ss_->getPlanner()->clear();
ss_->solve();
}
const std::size_t ns = ss_->getProblemDefinition()->getSolutionCount();
OMPL_INFORM("Found %d solutions", (int)ns);
if (ss_->haveSolutionPath())
{
if (!useDeterministicSampling_)
ss_->simplifySolution();
og::PathGeometric& p = ss_->getSolutionPath();
if (!useDeterministicSampling_)
{
ss_->getPathSimplifier()->simplifyMax(p);
ss_->getPathSimplifier()->smoothBSpline(p);
}
return true;
}
return false;
}
void drawPath();
void recordSolution()
{
if (!ss_ || !ss_->haveSolutionPath())
return;
og::PathGeometric& p = ss_->getSolutionPath();
p.interpolate();
for (std::size_t i = 0; i < p.getStateCount(); ++i)
{
const int w = std::min(maxWidth_, (int)p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[0]);
const int h =
std::min(maxHeight_, (int)p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[1]);
//得到路径上的点的坐标
ompl::PPM::Color& c = ppm_.getPixel(h, w);
c.red = 255;
c.green = 0;
c.blue = 0;
//在该坐标处画红点,设置vrep里面的robot位置原理与此一致
}
}
void save(const char* filename)
{
if (!ss_)
return;
ppm_.saveFile(filename);
}
private:
bool isStateValid(const ob::State* state) const
{
const int w = std::min((int)state->as<ob::RealVectorStateSpace::StateType>()->values[0], maxWidth_);
const int h = std::min((int)state->as<ob::RealVectorStateSpace::StateType>()->values[1], maxHeight_);
const ompl::PPM::Color& c = ppm_.getPixel(h, w);
return c.red > 127 && c.green > 127 && c.blue > 127;
}
ob::StateSamplerPtr allocateHaltonStateSamplerRealVector(const ompl::base::StateSpace* space, unsigned int dim,
std::vector<unsigned int> bases = {})
{
// specify which deterministic sequence to use, here: HaltonSequence
// optionally we can specify the bases used for generation (otherwise first dim prime numbers are used)
if (bases.size() != 0)
return std::make_shared<ompl::base::RealVectorDeterministicStateSampler>(
space, std::make_shared<ompl::base::HaltonSequence>(bases.size(), bases));
else
return std::make_shared<ompl::base::RealVectorDeterministicStateSampler>(
space, std::make_shared<ompl::base::HaltonSequence>(dim));
}
og::SimpleSetupPtr ss_;
int maxWidth_;
int maxHeight_;
ompl::PPM ppm_;
bool useDeterministicSampling_;
};
main.h 里面定义vrep里面robot移动的过程
#pragma once
#include "vrep.h"
#include "2dpointplanningdemo.h"
using namespace std;
namespace vp = vrepspace;
vp::vrep m_vrep;
void Plane2DEnvironment::drawPath()
{
float x, y;
if (ss_->haveSolutionPath())
{
if (!useDeterministicSampling_)
ss_->simplifySolution();
og::PathGeometric& p = ss_->getSolutionPath();
if (!useDeterministicSampling_)
{
ss_->getPathSimplifier()->simplifyMax(p);
ss_->getPathSimplifier()->smoothBSpline(p);
}
size_t length = p.getStateCount();//得到路径节点数
//p.interpolate(20); // 已经样条曲线平滑过了就不插补了
cout << "path length is : " << endl << length << endl;
for (int i = 0; i < length; i++)
{
x = (p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[0])/100; //注意像素距离转换到vrep里面的实际距离,差100倍
y = (p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[1])/100;
cout << "path point : " << i << ". x : " << x << ".y : " << y << endl;
m_vrep.vrep_setpose2d(m_vrep.robot_handle, x, y);
extApi_sleepMs(10);
}
}
}
main.c 主函数
/*********************************************************************
* @ Harbin Institute of Technology
*
* @author : HI_FORREST
*
* @date : 2021.12.27
*
*
*********************************************************************/
#include "main.h"
int main()
{
m_vrep.vrep_connect("127.0.0.1"); // 连接到本机的vrep程序
m_vrep.vrep_start(); //开始仿真
std::cout << "OMPL version: " << OMPL_VERSION << std::endl;
boost::filesystem::path path("E:/c++program/ompl/resources/resources/"); // ompl安装文件夹里复制出来的,D:vcpkg-masterbuildtreesomplsrc1.5.1-f5b2356dec.cleantestsresources 。用vcpkg安装的ompl,该文件夹在这里。
bool useDeterministicSampling = true;
Plane2DEnvironment env((path/"ppm/floor.ppm").string().c_str(), useDeterministicSampling);
float pos[3] = { 0,0,0 };
float target[3] = { 0,0,0 };
m_vrep.getobjectpos(m_vrep.robot_handle, pos);
m_vrep.getobjectpos(m_vrep.goal_handle, target);//根据vrep里面的当做起点终点的dummy初始化路径规划的起终点。
int x = (int)(pos[0] * 100);
int y = (int)(pos[1] * 100);
int tx = (int)(target[0] * 100);
int ty = (int)(target[1] * 100);// 该demo以图像像素数为距离进行规划,图片尺寸1895×1568,vrep里面的实际尺寸设为18.95米×15.68米。ppm图片可以用WPS打开!之前专门下了一个xnview mp 软件也可以,但是不如WPS方便。
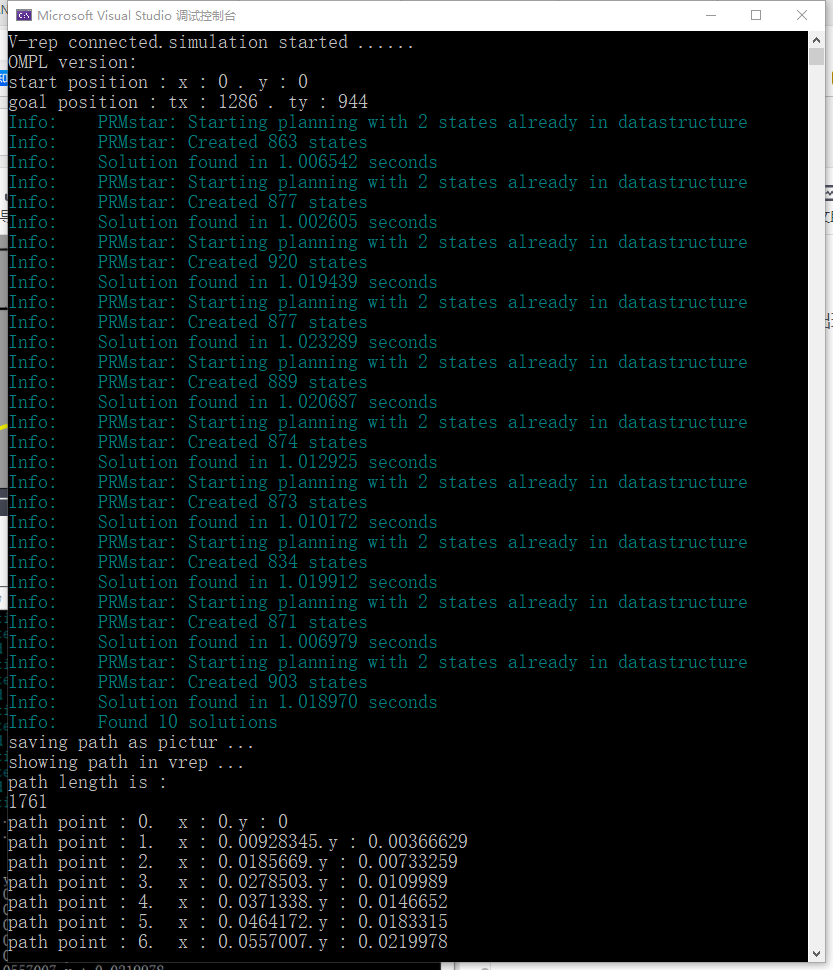
cout << "start position : x : " << x << " . y : " << y << endl;
cout << "goal position : tx : " << tx << " . ty : " << ty << endl;
if (env.plan(x, y, tx, ty)) //如果路径规划成功执行以下内容
{
env.recordSolution();
cout << "saving path as pictur ... " << endl;
env.save("result_demo.ppm");
cout << "showing path in vrep ... " << endl;
env.drawPath(); // 看main.h的定义
}
return 0;
}
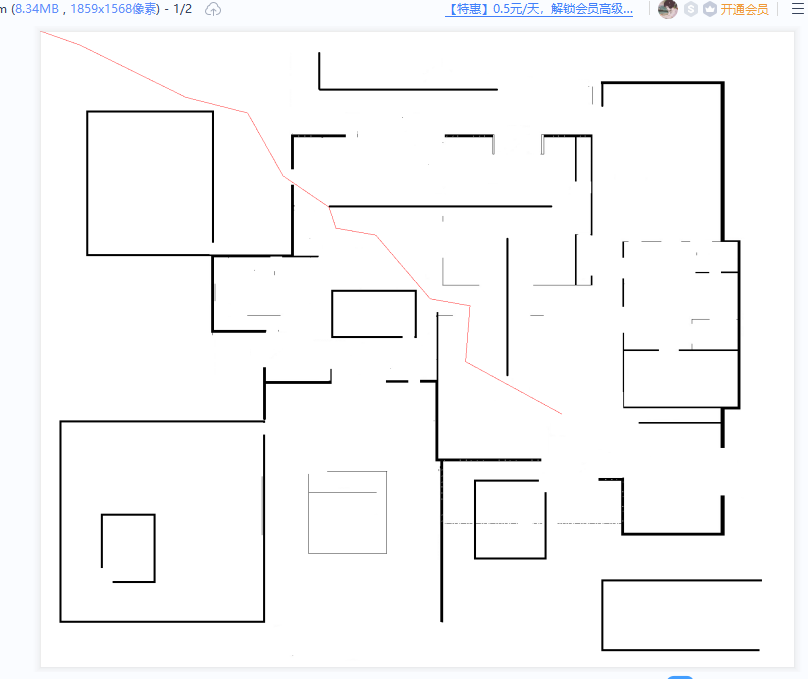
ppm地图以左上角为原点,向下为y轴正方形,向右为x轴正方形,因此vrep里面的地图绕x轴转了180°,同时向右上方移动半张图,使原点位于地图左下角。
实际路径在ppm和vrep中如图:
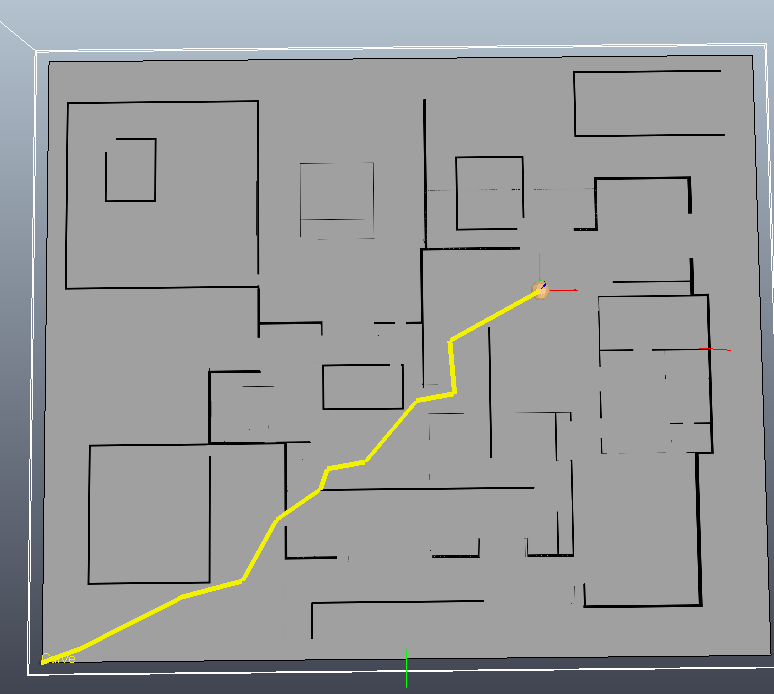
十次规划均有解
最后
以上就是狂野小松鼠最近收集整理的关于【OMPL.demo.1】二维点到点的全部内容,更多相关【OMPL内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复