注:这一系列的文章是我大四时写的,现在回顾,发现当时的布局和公式实在是太难看了,读者可移步至这里查看舒服的排版github同步博客。
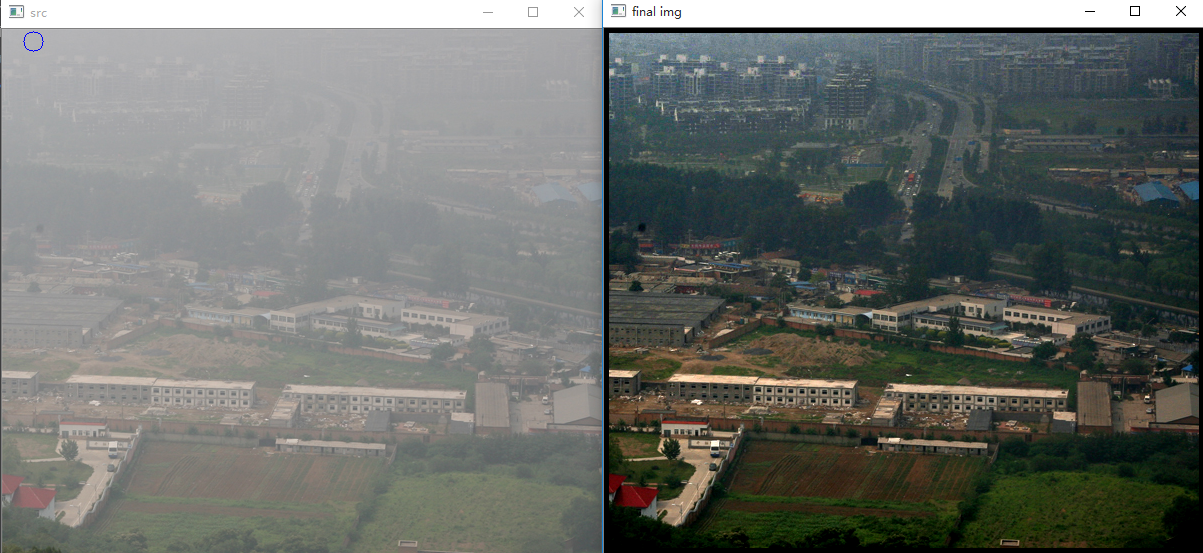
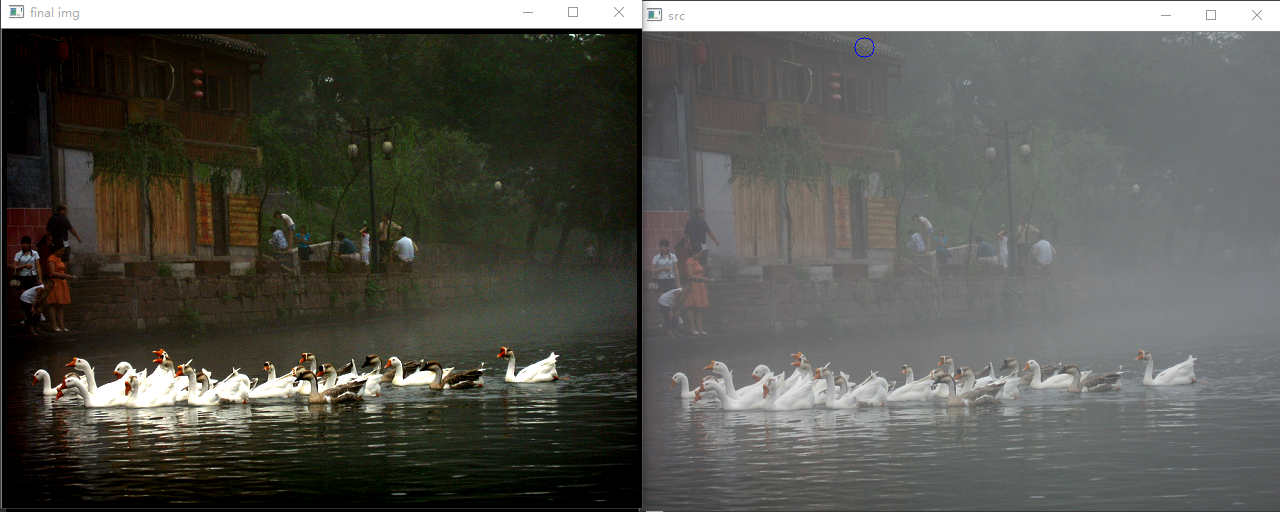
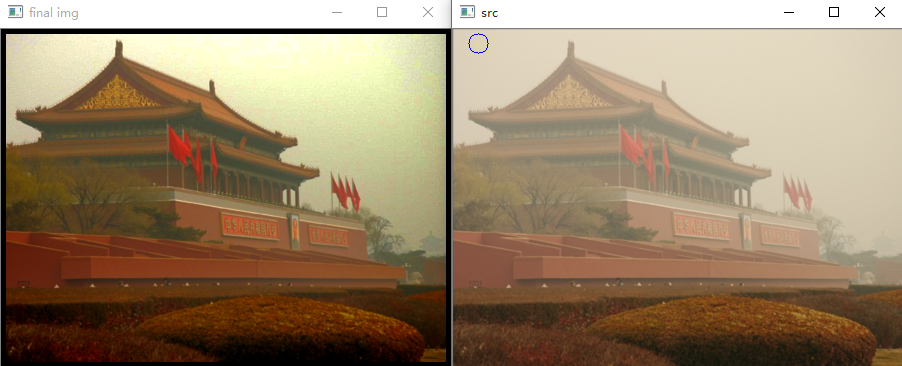
上一篇中,学习了何的论文中的去雾方法,这一篇中,我按照何的论文思路借助opencv 2.4.10 进行了实现,效果的确很好,就是耗时太多了,效果见下图:蓝色圆圈代表大气光值的取值点。
点我查看测试样例
突然发现上一篇中忘了介绍大气光值A的求解了,论文中是这样做的:
1.首先取暗通道图中最亮的千分之一的像素点。
2.根据这些像素点的位置在原图中搜索一个最亮的点,这个点的强度(intensity)就是我们要求的A啦。
论文作者何认为这样做的好处就是避免了原图中比较亮的物体作为A的值,比如图片中的白色的汽车,如果从原图中搜索最亮的点不一定能搜到真实的大气光值,可能是白色物体的反射光(感觉我说的好啰嗦)
开始本篇。。首先分享一下我在实现的过程中发现的几点:
1.大气光值A的解释,原论文中说那个最亮的点的强度就是我们要找的A,那么问题来了,最亮的点的强度是啥?大气光值A是一个值还是一个RGB三元组呢?
可以肯定的是,A是RGB的一个三元组,RGB三个通道有各自的A,这一点可以从论文的公式中确认。
那么搜索的时候,如何定义一个点的强度呢?这里,我采用的是求RGB的平均值。
2.透射率t(X)不是一个值,是一个同原图一样大小的矩阵,不同的位置有不同的透射率t
在具体求解的时候我进行了一点点简化,即:直接把暗通道图输入,这样减少了一次最小值滤波的过程,而且对结果几乎没有影响的,小小的提速。
3.透射率图片的精细化
这里我采用了别人写的引导滤波算法,这是一种边缘保持算法;实现的时候需要注意的是引导图需要实现归一化为0.0-1.0之间,因为t在0-1之间。
附连接:http://blog.csdn.net/pi9nc/article/details/26592377 引导滤波算法
4.最后求J的时候注意设置0-255的门限,因为按照公式求时可能出现很大的值也可能有负值出现!!!(调了半天才发现J可能为负值啊亲!)
5.opencv中遍历图片,最好要用指针啊亲!使用at随机取元素 和使用指针取元素在我的测试中相差了0.5s呢。
6.网上流传的一个opencv的c++代码中,在计算暗通道的最小值滤波时把原图分成了若干个window,每一个window赋予相同的值,这显然是不符合论文公式的,希望大家不要被误导!!可能那个博主是想降低时间复杂度吧,但是那样的操作太粗糙了,违背了滤波的概念。
一 暗通道的计算
我的想法是,先求出每个像素中最暗的那个通道值,最后再统一进行最小值滤波。minfliter是最小值滤波函数,大家自己实现一下就好啦。
Mat Producedarkimg(Mat& I,int windowsize)
{
int min=255;
Mat dark_img(I.rows,I.cols,CV_8UC1);
int radius=(windowsize-1)/2;
int nr= I.rows; // number of rows
int nl=I.cols;
int b,g,r;
if (I.isContinuous()) {
nl = nr * nl;
nr = 1;
}
for(int i=0;i<nr;i++)
{
const uchar* inData=I.ptr<uchar>(i);
uchar* outData=dark_img.ptr<uchar>(i);
for(int j=0;j<nl;j++)
{
b=*inData++;
g=*inData++;
r=*inData++;
min=min>b?b:min;
min=min>g?g:min;
min=min>r?r:min;
*outData++=min;
min=255;
}
}
dark_img=minfliter(dark_img,windowsize);
return dark_img;
}二 计算大气光值A(airlight)
输入:暗通道图,原图,窗口大小(必须奇数)
输出:大气光值A,一个包含三个元素的一维数组头
其中,Pixel是我定义的结构体,定义在下边
注意c++返回数组类型时,一定要用new为数组分配空间,不能用int A[3]={0,0,0};这种方式!!否则返回的数组可能会被释放掉!(别问我为什么知道这么多,都是我爬过的坑啊)
int* getatmospheric_light(Mat& darkimg,Mat& srcimg,int windowsize)
{
int radius=(windowsize-1)/2;
int nr=darkimg.rows,nl=darkimg.cols;
int darksize=nr*nl;
int topsize=darksize/1000;
int *A=new int[3];
int sum[3]={0,0,0};
Pixel *toppixels,*allpixels;
toppixels=new Pixel[topsize];
allpixels=new Pixel[darksize];
for(int i=0;i<nr;i++){
const uchar* outData=darkimg.ptr<uchar>(i);
for(int j=0;j<nl;j++)
{
allpixels[i*nl+j].value=*outData++;
allpixels[i*nl+j].x=i;
allpixels[i*nl+j].y=j;
}
}
//std::qsort(allpixels,darksize,sizeof(Pixel),qcmp);
std::sort(allpixels,allpixels+darksize,cmp);
memcpy(toppixels,allpixels,(topsize)*sizeof(Pixel)); //找到了在darkimg中最亮的0.1%个
int val0,val1,val2,avg,max=0,maxi,maxj,x,y;
for(int i=0;i<topsize;i++)
{
x=allpixels[i].x;y=allpixels[i].y;
const uchar* outData=srcimg.ptr<uchar>(x);
outData+=3*y;
val0=*outData++;
val1=*outData++;
val2=*outData++;
avg=(val0+val1+val2)/3;
if(max<avg){max=avg;maxi=x;maxj=y;}
}
for(int i=0;i<3;i++)
{
A[i]=srcimg.at<Vec3b>(maxi,maxj)[i];
//A[i]=srcimg.at<Vec4b>(maxi,maxj)[i];
//A[i]=A[i]>220?220:A[i];
}
return A;
}typedef struct Pixel
{
int x;
int y;
int value;
}Pixel;三 计算透射图(transmission)并精细(refine)化
输入:原图,暗通道图,大气光值A,窗口大小
输出:透射图t
之所以需要暗通道图参数,是因为我进行了简化,使用暗通道图加速计算
最后的引导滤波使用原图的灰度图进行引导,具体实现参考上述链接。
Mat getTransmission_dark(Mat& srcimg,Mat& darkimg,int *array,int windowsize)
{
float test;
float avg_A=(array[0]+array[1]+array[2])/3.0;
float w=0.95;
int radius=(windowsize-1)/2;
int nr=srcimg.rows,nl=srcimg.cols;
Mat transmission(nr,nl,CV_32FC1);
for(int k=0;k<nr;k++){
const uchar* inData=darkimg.ptr<uchar>(k);
for(int l=0;l<nl;l++)
{
transmission.at<float>(k,l)=1-w*(*inData++/avg_A);
}
}
Mat trans(nr,nl,CV_32FC1);
Mat graymat(nr,nl,CV_8UC1);
Mat graymat_32F(nr,nl,CV_32FC1);
cvtColor(srcimg,graymat, CV_BGR2GRAY);
for(int i=0;i<nr;i++){
const uchar* inData=graymat.ptr<uchar>(i);
for(int j=0;j<nl;j++)
graymat_32F.at<float>(i,j)=*inData++/255.0;
}
guidedFilter(transmission,graymat_32F,trans,6*windowsize,0.001);
//bilateralFilter(transmission,trans,10,30,100);
//GaussianBlur(transmission,trans,Size(11,11),0,0);
return trans;
}四 计算J(X)
输入:原图,透射图,大气光值,窗口
输出:去雾图
Mat recover(Mat& srcimg,Mat& t,int *array,int windowsize)
{
int test;
int radius=(windowsize-1)/2;
int nr=srcimg.rows,nl=srcimg.cols;
float tnow=t.at<float>(radius,radius);
float t0=0.1;
Mat finalimg=Mat::zeros(nr,nl,CV_8UC3);
int val=0;
for(int i=0;i<3;i++){
for(int k=radius;k<nr-radius;k++){
const float* inData=t.ptr<float>(k);
inData+=radius;
const uchar* srcData=srcimg.ptr<uchar>(k);
srcData+=radius*3+i;
uchar* outData=finalimg.ptr<uchar>(k);
outData+=radius*3+i;
for(int l=radius;l<nl-radius;l++)
{
tnow=*inData++;
tnow=tnow>t0?tnow:t0;
val=(int)((*srcData-array[i])/tnow+array[i]);
srcData+=3;
val=val<0?0:val;
*outData=val>255?255:val;
outData+=3;
}
}
}
return finalimg;
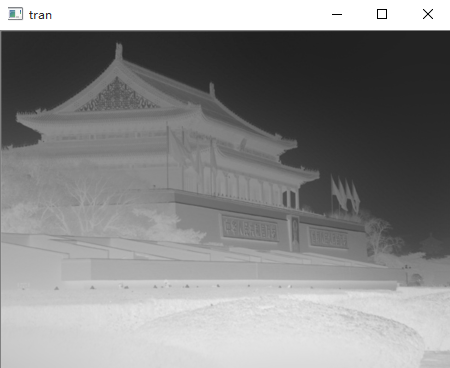
}实例效果:
天安门的透射图(transmission)如下:可以看到效果的确很好,很精细,这就是使用原图像的灰度图就行引导的好处。
下一篇,介绍一下我的几点优化,主要是执行时间和透射图的优化。
最后
以上就是清脆冷风最近收集整理的关于基于暗通道去雾算法的实现与优化(二)opencv在pc上的实现的全部内容,更多相关基于暗通道去雾算法内容请搜索靠谱客的其他文章。








发表评论 取消回复