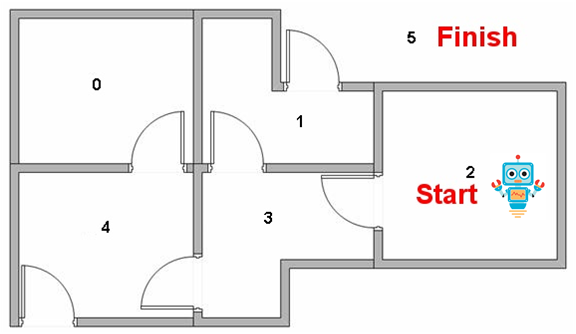
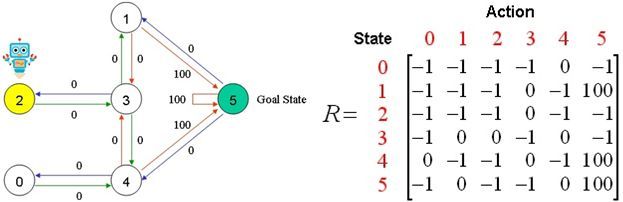
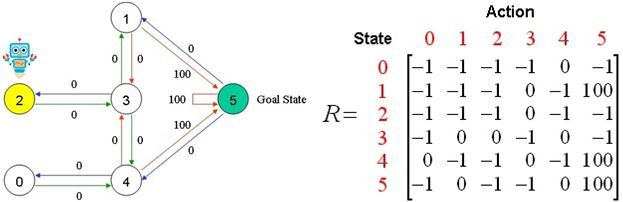
假设建筑物中有5个房间,如上图所示。我们将每个房间的编号设为0到4.建筑物的外部可以被认为是一个大房间(5)。当然,5号房间的回报率为100,其他所有与目标房间的直接连接奖励为100。
Q(1,5)= R(1,5)+ 0.8 * Max [] = 100 + 0.8 * 0 = 100
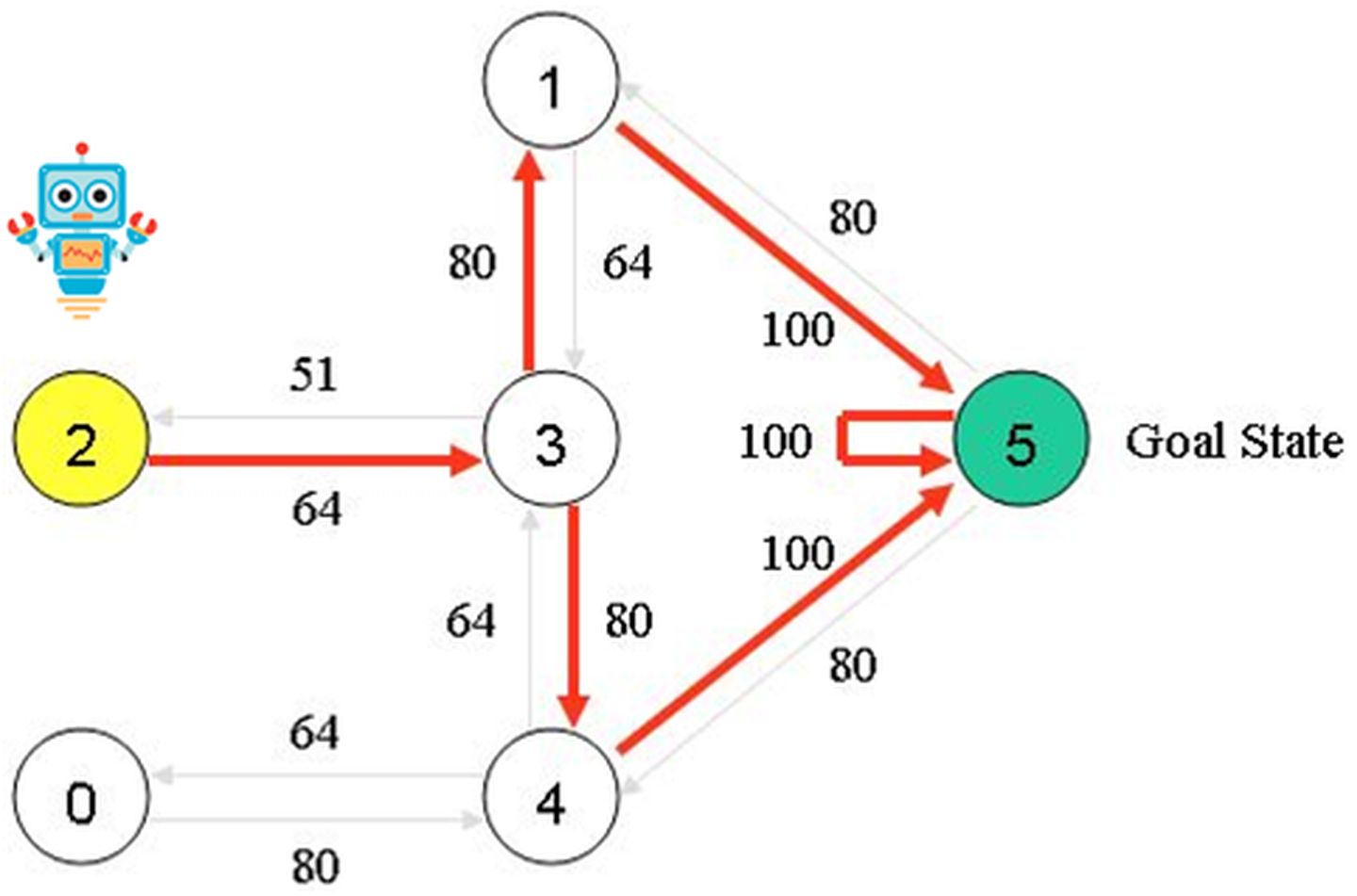
机器人从状态2开始,我们希望他能够学习到房子外面状态5。
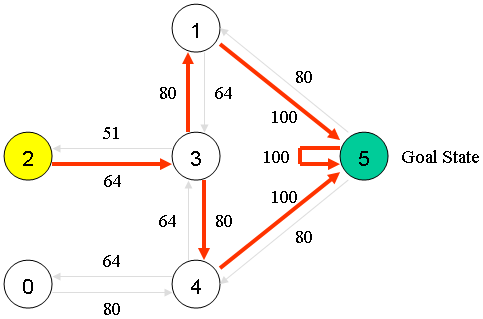
状态列表:
状态0可到达——>状态4;
状态1可到达——>状态3、5;
状态2可到达——>状态3;
状态3可到达——>状态1、2、4;
状态4可到达——>状态0、3、5;
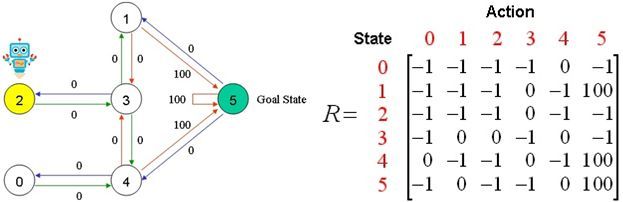
状态5可到达——>状态1、4、5;我们可以将状态图和即时奖励值放入以下奖励表格“矩阵R”中。
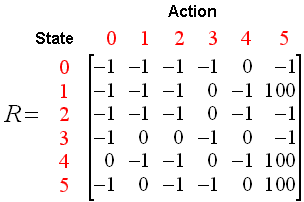
R-table
其中:[-1]表示状态之间是不互通;[0]表示状态之间互通,奖励为0;[100]表示状态之间互通,奖励为100。
R矩阵的列是机器人所处状态X_{0、1、2、3、4、5}下一步能到达的房间状态的可能。
R矩阵的行是能到达状态X_{0、1、2、3、4、5}机器人所处的房间状态。
例如:第一列是指状态0,下一步可到达的房间状态4;(参见上面的状态列表)
第一行是指下一步到达房间状态0,只有状态4;(参见上面的状态列表)
现在我们添加一个类似“矩阵R”的“矩阵Q”作为Agent的大脑,即通过经验学到的东西。“矩阵Q”的行表示Agent当前的状态,列表示下一个状态(节点之间的链接)的可能动作。
Agent开始什么都不知道,“矩阵Q”被初始化为零。“矩阵Q”只能从一个元素开始。如果找到新状态,则更新“矩阵Q”,这被称为无监督学习。
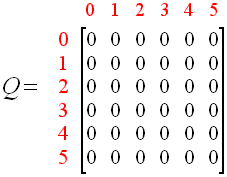
Q-table
Q-learning的过渡规则是一个非常简单的公式:
Q(状态,动作)= R(状态,动作)+ Gamma *最大[ Q(下一个状态,所有动作)]
即:Q(state, action) = R(state, action) + Gamma * Max[Q(next state, all actions)]
根据该公式,分配给矩阵Q的特定元素的值等于矩阵R中的对应值与学习参数Gamma之和,乘以下一状态下所有可能动作的Q的最大值。
举例说明:【将学习参数Gamma设置为0.8】
First:随机选择初始状态1
第一步:在R-table的第二列(状态1)下一跳能到达状态3、5;
第二步:随机选择下一跳,假设为状态5;
第三步:计算Q-table,更新,,因为5是目标状态,所以我们完成了一轮;
Q(状态,动作)= R(状态,动作)+ Gamma *max[ Q(下一个状态,所有动作)]
Q(1,5)= R(1,5)+ 0.8 * Max [ Q(5,1),Q(5,4),(5,5)] = 100 + 0.8 * 0 = 100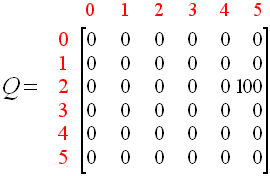
update Q-table
First round:update Q-table
Second :随机选择初始状态3
第一步:在R-table的第四列(状态3)下一跳能到达状态1、2、4;
第二步:随机选择下一跳,假设为状态1;
第三步:在R-table的第二列(状态1)下一跳能到达状态3、5;
第四步:计算Q-table,更新,,
Q(状态,动作)= R(状态,动作)+ Gamma *max[ Q(下一个状态,所有动作)]
Q(3,1)= R(3,1)+ 0.8 * Max [ Q(1,3),Q(1,5)] = 0 + 0.8 * Max(0,100)= 80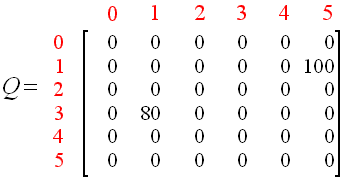
Third 随机选择初始状态4
第一步:在R-table的第五列(状态4)下一跳能到达状态0、3、5;
第二步:随机选择下一跳,假设为状态5;
第三步:计算Q-table,更新,,因为5是目标状态,所以我们完成了一轮;
Q(状态,动作)= R(状态,动作)+ Gamma *max[ Q(下一个状态,所有动作)]
Q(4,5)= R(4,5)+ 0.8 * Max [Q(5,1),Q(5,4),(5,5)] = 100 + 0.8 * 0 = 100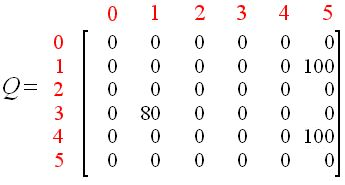
Four round:随机选择初始状态0
第一步:在R-table的第一列(状态0)下一跳能到达状态4;
第二步:只能选择下一跳,状态4;
第三步:在R-table的第五列(状态4)下一跳能到达状态3、5;
第四步:计算Q-table,更新,
Q(状态,动作)= R(状态,动作)+ Gamma *max[ Q(下一个状态,所有动作)]
Q(0,4)= R(0,4)+ 0.8 * Max [ Q(4,3),Q(4,5)] = 0 + 0.8 * Max(0,100)= 80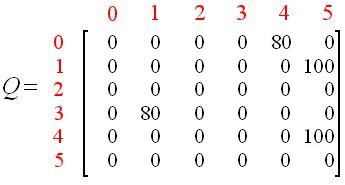
Fifth :随机选择初始状态1
第一步:在R-table的第二列(状态1)下一跳能到达状态3、5;
第二步:随机选择下一跳,假设为状态3;
第三步:在R-table的第四列(状态3)下一跳能到达状态1、2、4;
第四步:计算Q-table,更新,;
Q(状态,动作)= R(状态,动作)+ Gamma *max[ Q(下一个状态,所有动作)]
Q(1,3)= R(1,3)+ 0.8 * Max [Q(3,1),Q(3,2),Q(3,4)] =
0 + 0.8 * Max(0,0,0,80)= 0 + 0.8 * 80 = 64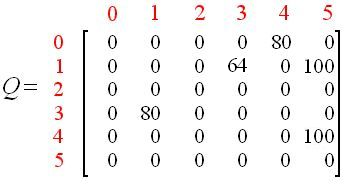
经过循环迭代,最终得到Q-table:
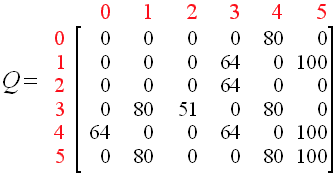
例如,从初始状态2开始,代理可以使用矩阵Q作为指导:
从状态2开始,最大Q值表明要进入状态3的动作。
从状态3开始,最大Q值表示两种选择:进入状态1或4.假设我们任意选择去1。
从状态1开始,最大Q值表明要进入状态5的动作。
因此,序列是2 - 3 - 1 - 5。
最后
以上就是懦弱板栗最近收集整理的关于Q学习例子的全部内容,更多相关Q学习例子内容请搜索靠谱客的其他文章。








发表评论 取消回复