本系列文章由 @YhL_Leo 出品,转载请注明出处。
文章链接: http://blog.csdn.net/yhl_leo/article/details/73294793
RANSAC 算法是一种常用的估计模型参数的方法,相关的算法介绍网上有很多,这里不再累述,主要介绍如何利用RANSAC 方法进行 2D 直线以及 3D 平面拟合。
Source code (python version): Github/yhlleo/RANSAC-fit
1 拟合模型
之所以要自己去实现算法,主要是由于可以直接使用的代码程序和函数库,对于直线以及平面方程一般使用:
lines: y=ax+bplanes: z=ax+by+c
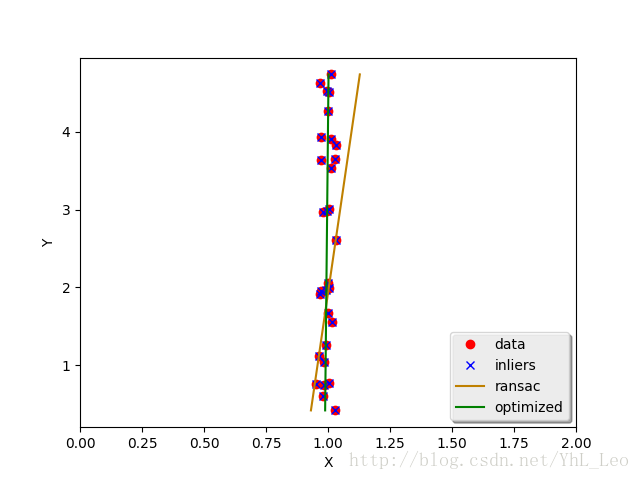
这样不通用的表达方式,对于自然情景中的很多线性回归问题,一般没什么问题,但是对于一些简单的应用情景,比如本文提到的直线、平面拟合问题,就不具有绝对的通用性,比如斜率不存在的line :
x=n, n∈R
,上述的直线方程就无法拟合,同理平面拟合也存在类似问题。因此,采用下面的方法更具有一般性:
lines: ax+by+c=0planes: ax+by+cz+d=0
对于 2D 直线采用两点式方程,给定直线上任意不同两点 p(x1,y1), q(x2,y2) ,则有:
展开为点积式:
进而可以得到:
在对直线进行归一化处理:
同时,如果 a≠0 ,令 a>0 , 否则令 b>0 。
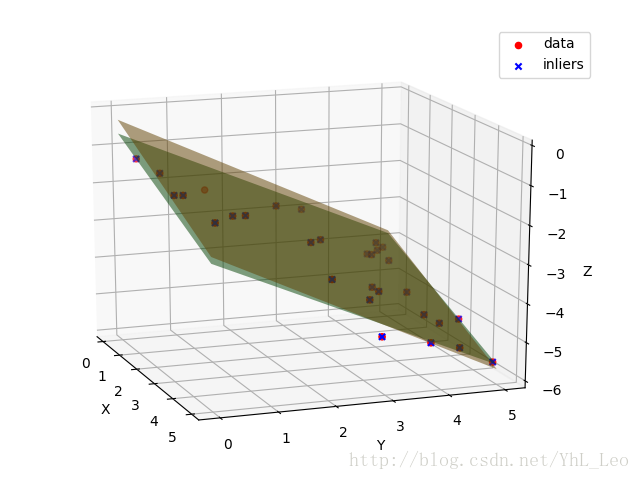
3D 平面则采用三点式直线方程,给定平面上任意不共线的三点 {pi(xi,yi), i=1,2,3.} , 则有:
对等式左边行列式按照第一行,进行行展开可得:
进而可得:
同样进行归一化处理:
拟合过程中,判断inlier 和 outlier的判别函数,分别采用点到直线、平面的距离公式:
point to line: d=|ax0+by0+c|point to plane: d=|ax0+by0+cz0+d|
注: 因为对直线和平面都已经进行了归一化处理,所以计算距离部分的分母都略去。
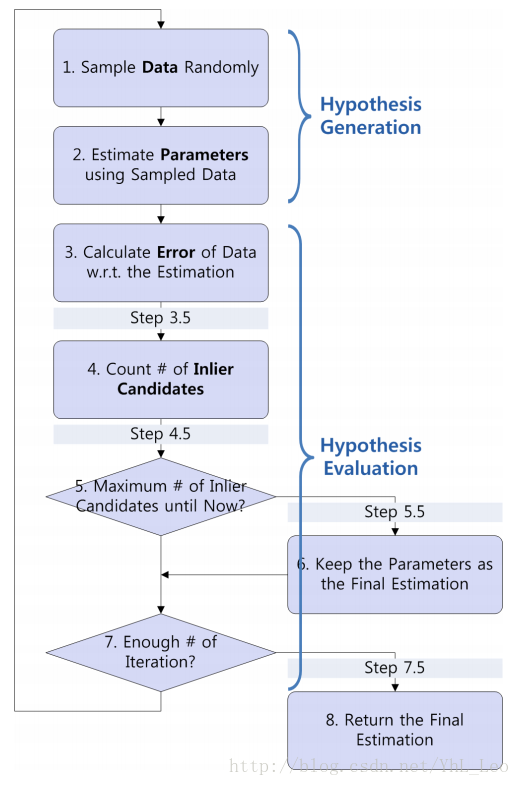
迭代过程如图:
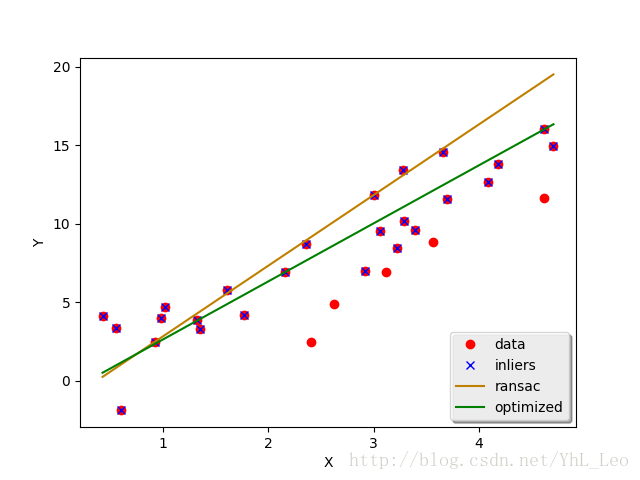
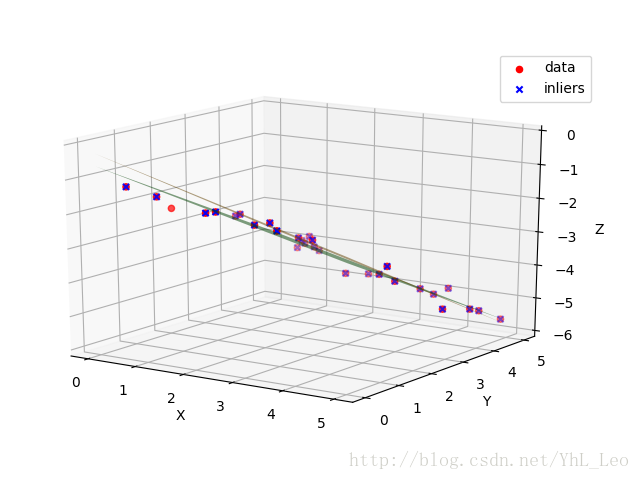
2 优化拟合模型
通过简单的迭代获得的模型,可以满足inliers 数量最大,但是并不一定最优,可以根据inliers的特征值以及特征向量进行优化,这里把测试的结果图展示如下:
- References:
- https://en.wikipedia.org/wiki/Random_sample_consensus
- Robust linear model estimation using RANSAC
- Performance Evaluation of RANSAC Family
最后
以上就是现实星月最近收集整理的关于RANSAC Fitting的全部内容,更多相关RANSAC内容请搜索靠谱客的其他文章。








发表评论 取消回复