一,噪声的介绍和卷积
二、各个滤波函数的解读,定义与源代码
三、综合所有的滤波,加滑动条控制核大小来blur
四、Matlab 辅助表达
一,噪声的介绍
图像噪声是图像在摄取或传输时所受的随机信号干扰,是图像中各种妨碍人们对其信息接受的因素。很多时候将图像噪声看成是多维随机过程,因而描述噪声的方法完全可以借用随机过程的描述,即用其概率分布函数和概率密度分布函数。我们常看到的就是淑艳噪声 salt&pepper,这里对噪声有理论的介绍http://blog.csdn.net/qq_20823641/article/details/51513567,可以学习一下。
二、各个滤波函数的解读,定义与源代码
这里通说噪声分为线性和非线性,官方中给了BoxBlur,Blur,GaussianBlur,medianBlur,bilateralBlur,其中方框滤波和均值滤波有相同有不同,准备说均值滤波是方框滤波的特殊,从函数BoxBlur与Blur也可以看出,下面的图也是一种解释
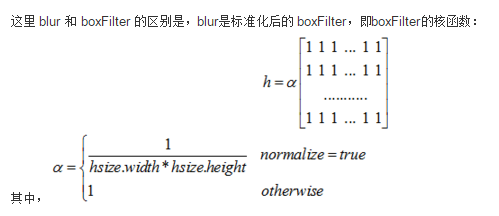
滤波器:可以说滤波器是一个包含加权系数的窗口,当使用这个滤波器平滑处理图像时,就把这个窗口放到图像上,透过这个窗口来看图像,有时候也叫做核函数 kernel,相信经常看见这个词语。
其中在看到这个窗口的时候我建议大家看看卷积的概念,http://baike.baidu.com/link?url=lQxRSr-C41IoYNqYyOwXE1FfsufcuptxFhBE2AJexoL9bdhSVOaRppD7f4r8T8C5DAR8ggGgQVXrgMmHr-PfJq
<span style="font-size:18px;">C++: void boxFilter(InputArray src,OutputArray dst, int ddepth, Size ksize, Point anchor=Point(-1,-1), boolnormalize=true, int borderType=BORDER_DEFAULT )
</span>- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的ddepth,输出图像的深度,-1代表使用原图深度,即src.depth()。
- 第四个参数,Size类型(对Size类型稍后有讲解)的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
- 第五个参数,Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
- 第六个参数,bool类型的normalize,默认值为true,一个标识符,表示内核是否被其区域归一化(normalized)了。
- 第七个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它
<span style="font-size:18px;">void cv::blur( InputArray src, OutputArray dst,
Size ksize, Point anchor, int borderType )
{
boxFilter( src, dst, -1, ksize, anchor, true, borderType );
}
</span>- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。该函数对通道是独立处理的,且可以处理任意通道数的图片,但需要注意,待处理的图片深度应该为CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,Size类型(对Size类型稍后有讲解)的ksize,内核的大小。一般这样写Size( w,h )来表示内核的大小( 其中,w 为像素宽度, h为像素高度)。Size(3,3)就表示3x3的核大小,Size(5,5)就表示5x5的核大小
- 第四个参数,Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。
- 第五个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它。
<span style="font-size:18px;">cv::Ptr<cv::FilterEngine> cv::createBoxFilter( int srcType, int dstType, Size ksize,
Point anchor, bool normalize, int borderType )
{
int sdepth = CV_MAT_DEPTH(srcType);
int cn = CV_MAT_CN(srcType), sumType = CV_64F;
if( sdepth <= CV_32S && (!normalize ||
ksize.width*ksize.height <= (sdepth == CV_8U ? (1<<23) :
sdepth == CV_16U ? (1 << 15) : (1 << 16))) )
sumType = CV_32S;
sumType = CV_MAKETYPE( sumType, cn );
Ptr<BaseRowFilter> rowFilter = getRowSumFilter(srcType, sumType, ksize.width, anchor.x );
Ptr<BaseColumnFilter> columnFilter = getColumnSumFilter(sumType,
dstType, ksize.height, anchor.y, normalize ? 1./(ksize.width*ksize.height) : 1);
return Ptr<FilterEngine>(new FilterEngine(Ptr<BaseFilter>(0), rowFilter, columnFilter,
srcType, dstType, sumType, borderType ));
}</span>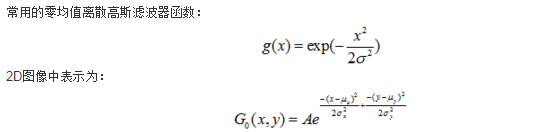
<span style="font-size:18px;">C++: void GaussianBlur(InputArray src,OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, intborderType=BORDER_DEFAULT )
</span>- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可。它可以是单独的任意通道数的图片,但需要注意,图片深度应该为CV_8U,CV_16U, CV_16S, CV_32F 以及 CV_64F之一。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。比如可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,Size类型的ksize高斯内核的大小。其中ksize.width和ksize.height可以不同,但他们都必须为正数和奇数。或者,它们可以是零的,它们都是由sigma计算而来。
- 第四个参数,double类型的sigmaX,表示高斯核函数在X方向的的标准偏差。
- 第五个参数,double类型的sigmaY,表示高斯核函数在Y方向的的标准偏差。若sigmaY为零,就将它设为sigmaX,如果sigmaX和sigmaY都是0,那么就由ksize.width和ksize.height计算出来。
- 为了结果的正确性着想,最好是把第三个参数Size,第四个参数sigmaX和第五个参数sigmaY全部指定到。
- 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT,我们一般不去管它
<span style="font-size:18px;">C++: void medianBlur(InputArray src,OutputArray dst, int ksize)
</span>- 第一个参数,InputArray类型的src,函数的输入参数,填1、3或者4通道的Mat类型的图像;当ksize为3或者5的时候,图像深度需为CV_8U,CV_16U,或CV_32F其中之一,而对于较大孔径尺寸的图片,它只能是CV_8U。
- 第二个参数,OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。我们可以用Mat::Clone,以源图片为模板,来初始化得到如假包换的目标图。
- 第三个参数,int类型的ksize,孔径的线性尺寸(aperture linear size),注意这个参数必须是大于1的奇数,比如:3,5,7,9 ...
<span style="font-size:18px;">C++: void bilateralFilter(InputArray src, OutputArraydst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT)
</span>- 第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。
- 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。
- 第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
- 第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。
- 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。
<span style="font-size:18px;">#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
Mat g_srcImage,g_dstImage1,g_dstImage2,g_dstImage3,g_dstImage4,g_dstImage5;
int g_nBoxFilterValue=6;
//方框滤波内核值
int g_nMeanBlurValue=10;
//均值滤波内核值
int g_nGaussianBlurValue=6;
//高斯滤波内核值
int g_nMedianBlurValue=10;
//中值滤波参数值
int g_nBilateralFilterValue=10;
//双边滤波参数值
static void on_BoxFilter(int, void *);
//方框滤波
static void on_MeanBlur(int, void *);
//均值块滤波器
static void on_GaussianBlur(int, void *);
//高斯滤波器
static void on_MedianBlur(int, void *);
//中值滤波器
static void on_BilateralFilter(int, void *);
//双边滤波器
int main(
)
{
g_srcImage = imread( "lena.jpg", 1 );
g_dstImage1 = g_srcImage.clone( );
g_dstImage2 = g_srcImage.clone( );
g_dstImage3 = g_srcImage.clone( );
g_dstImage4 = g_srcImage.clone( );
g_dstImage5 = g_srcImage.clone( );
namedWindow("【<0>原图窗口】", 1);
imshow("【<0>原图窗口】",g_srcImage);
namedWindow("【<1>方框滤波】", 1);
createTrackbar("内核值:", "【<1>方框滤波】",&g_nBoxFilterValue, 50,on_BoxFilter );
on_MeanBlur(g_nBoxFilterValue,0);
imshow("【<1>方框滤波】", g_dstImage1);
namedWindow("【<2>均值滤波】", 1);
createTrackbar("内核值:", "【<2>均值滤波】",&g_nMeanBlurValue, 50,on_MeanBlur );
on_MeanBlur(g_nMeanBlurValue,0);</span><span style="font-size:18px;"> namedWindow("【<3>高斯滤波】", 1);
createTrackbar("内核值:", "【<3>高斯滤波】",&g_nGaussianBlurValue, 50,on_GaussianBlur );
on_GaussianBlur(g_nGaussianBlurValue,0);
namedWindow("【<4>中值滤波】", 1);
createTrackbar("参数值:", "【<4>中值滤波】",&g_nMedianBlurValue, 50,on_MedianBlur );
on_MedianBlur(g_nMedianBlurValue,0);
namedWindow("【<5>双边滤波】", 1);
createTrackbar("参数值:", "【<5>双边滤波】",&g_nBilateralFilterValue, 50,on_BilateralFilter);
on_BilateralFilter(g_nBilateralFilterValue,0);
return 0;
}
static void on_BoxFilter(int, void *)
{
boxFilter( g_srcImage, g_dstImage1, -1,Size( g_nBoxFilterValue+1, g_nBoxFilterValue+1));
imshow("【<1>方框滤波】", g_dstImage1);
}
static void on_MeanBlur(int, void *)
{
blur( g_srcImage, g_dstImage2, Size( g_nMeanBlurValue+1, g_nMeanBlurValue+1), Point(-1,-1));
imshow("【<2>均值滤波】", g_dstImage2);
}
static void on_GaussianBlur(int, void *)
{
GaussianBlur( g_srcImage, g_dstImage3, Size( g_nGaussianBlurValue*2+1, g_nGaussianBlurValue*2+1 ), 0, 0);
imshow("【<3>高斯滤波】", g_dstImage3);
}
static void on_MedianBlur(int, void *)
{
medianBlur ( g_srcImage, g_dstImage4, g_nMedianBlurValue*2+1 );
imshow("【<4>中值滤波】", g_dstImage4);
}
static void on_BilateralFilter(int, void *)
{
bilateralFilter ( g_srcImage, g_dstImage5, g_nBilateralFilterValue, g_nBilateralFilterValue*2, g_nBilateralFilterValue/2 );
imshow("【<5>双边滤波】", g_dstImage5);
}
</span>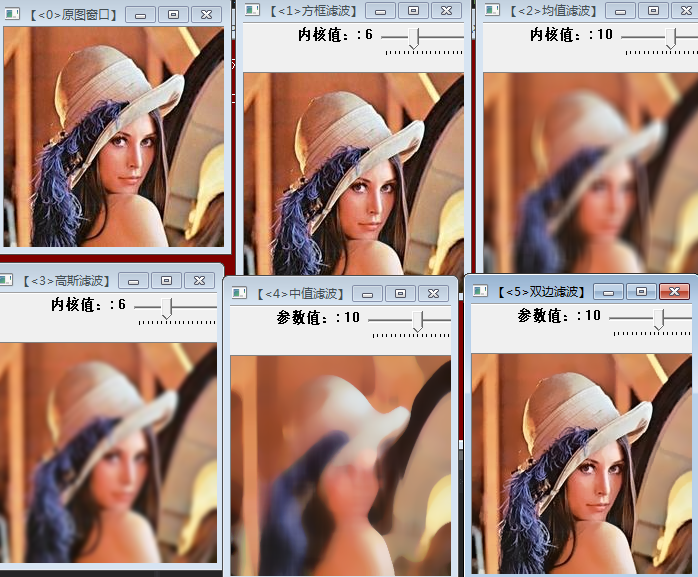
<span style="font-size:18px;">h=imread('d:lena.jpg');
A=fspecial('average',3);
output1 = imfilter(h, A, 'conv', 'replicate');
A=fspecial('gaussian',3);
output2 = imfilter(h, A, 'conv', 'replicate');
output3 = medfilt2(h, [3, 3]);</span>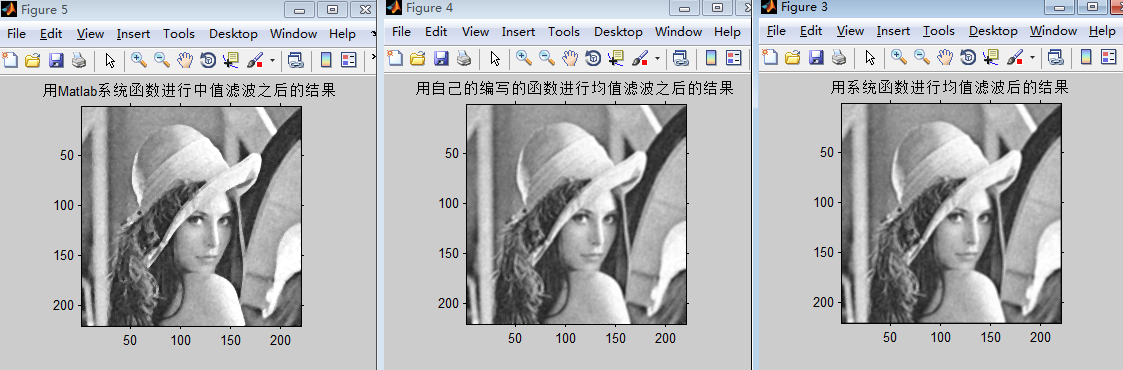
clear all;
close all;
clc;
img=imread('lena.jpg');
img=mat2gray(img);
[m n]=size(img);
imshow(img);
r=10;
imgn=zeros(m+2*r+1,n+2*r+1);
imgn(r+1:m+r,r+1:n+r)=img;
imgn(1:r,r+1:n+r)=img(1:r,1:n);
imgn(1:m+r,n+r+1:n+2*r+1)=imgn(1:m+r,n:n+r);
imgn(m+r+1:m+2*r+1,r+1:n+2*r+1)=imgn(m:m+r,r+1:n+2*r+1);
imgn(1:m+2*r+1,1:r)=imgn(1:m+2*r+1,r+1:2*r);
sigma_d=2;
sigma_r=0.1;
[x,y] = meshgrid(-r:r,-r:r);
w1=exp(-(x.^2+y.^2)/(2*sigma_d^2));
for i=r+1:m+r
for j=r+1:n+r
w2=exp(-(imgn(i-r:i+r,j-r:j+r)-imgn(i,j)).^2/(2*sigma_r^2));
w=w1.*w2;
s=imgn(i-r:i+r,j-r:j+r).*w;
imgn(i,j)=sum(sum(s))/sum(sum(w));
end
end
figure;
imshow(mat2gray(imgn(r+1:m+r,r+1:n+r)));还有另外一个函数调用的方法可以参考这里 http://blog.csdn.net/abcjennifer/article/details/7616663
最后
以上就是纯真衬衫最近收集整理的关于Opencv图像识别从零到精通(14)-----线性滤波和非线性滤波的全部内容,更多相关Opencv图像识别从零到精通(14)-----线性滤波和非线性滤波内容请搜索靠谱客的其他文章。








发表评论 取消回复