基于数字孪生的车间物流与制造智能同步制造系统
- 背景
- 相关文献回顾
- MPC系统
- 工业物联网和数字双胞胎的应用
- 生产同步化
- 研究动机
- 车间物流和制造同步的原则
- 面向同步的制造系统
- 信息同步共享
- 同步决策
- 同步操作
- 具有同步机制的工业物联网和数字孪生GiMS
- 工业物联网与数字孪生GiMS总体框架
- 车间物流与制造同步机制
- 结论
在整个生产过程中,物流接口与制造需要同步操作。为了实现制造和物流的一体化组织和运作,本文引入了车间物流和制造同步的概念,并提出了四个原则:1)面向同步的制造系统;2)信息同步共享;3)同步决策;4)同步操作。这些原则的结合促成了工业物联网(IIoT)和数字双能毕业式智能制造系统(GiMS)的总体框架的发展。提出了一种基于混合整数规划的同步机制。为满足实际车间物流与制造同步问题的快速决策需求,建立了等价约束规划模型并进行了测试。通过对案例公司的观察和分析,可以看出所提出的概念和方法在关键绩效指标方面的优势。同步的概念为理解物流和制造在操作层面的相互作用提供了一个洞察。这篇文章可能使制造商能够在工业物联网和基于数字双基础的制造环境中重新评估和开发他们的制造计划和控制策略。
背景
蓬勃发展的多样化需求,以及日益缩短的产品生命周期,促使制造业从业者重新评估现有的制造策略,以获得更多的竞争优势。为了更高效、更有效地生产和交付产品和服务,许多制造商转向竞争性制造计划和控制(MPC)战略,包括获取、利用和分配生产资源和活动,以满足客户的要求。
现代生产管理中提供了一系列MPC模块,如再订货点(ROP)系统、物料需求计划(MRP)系统、制造资源计划(MRP II)系统、制造执行系统(MES)、企业资源计划(ERP)系统等。但是,工业实践表明,这些MPC模块大部分是将制造业和物流分开处理,未能达到组织的目标和期待。
制造和物流之间的整合组织和操作是非常重要的,因为他们在整个生产过程中相互影响。包括制造和物流的整合可以在战略和运营层面进行。本文主要关注生产和物流在操作层面的集成。具体来说,它侧重于计划和控制涉及生产和物流的操作任务在车间。
两个主要的挑战阻碍了生产和物流在运营层面的整合。其一是制造业和物流业务之间缺乏连贯的数据收集和信息共享。最关键的挑战是不同步的组织和操作之间的车间物流和制造,因为两个部门往往努力满足不同的目标,分别和独立的优先级
随着工业物联网(IIoT)技术的出现,在工业和制造应用中实现对象级实时信息的自动识别和采集成为可能。传统制造对象通过配备各种工业物联网设备,可以成为实现通信和交互的智能对象。通过佩戴工业物联网可穿戴设备,现场操作人员可以与不同的生产资源进行动态通信和交互。由工业物联网实现的无处不在的连接、数字化和共享能够创造一种数字等效表示,这被称为数字孪生,随着物理对等物的变化而实时更新。
随着实时可见性和信息共享的革命性力量,工业物联网和数字孪生正在彻底改变制造和物流经理组织和管理其生产资源和活动的方式。但单靠技术赋能并不能保证车间物流与制造的组织和操作的同步,还需要相应的生产经营管理创新,以及两者的结合。虽然一些开创性的研究关注了工业物联网对车间物流与制造一体化的潜在影响,但主要挑战仍然存在以下几点。
1)如何创建车间物流和制造的数字化表示,并随着实体的变化实现实时同步?为了实现连贯的数据收集和信息共享,以支持车间物流和制造优化,创建具有适当信息集的数字表示,并实现它们之间的实时同步是至关重要的。
2)如何建立有效的机制,实现车间物流和制造的同步决策?物流与制造业对接,因为他们必须协调,以确定何时以及如何将正确的材料送到正确的地方。需要有效的机制来实现车间物流与制造的同步决策。
3)如何充分发挥所提出的机制的潜力,在操作层面实现车间物流与制造的同步?要在运作层面成功推行建议的机制,必须采用适当的方法,以促进管理人员和现场操作员的决策和日常运作。
为了应对上述挑战,提出了车间物流和制造同步的概念,以及相应的原则、方法和技术。本文的其余部分组织如下。第二部分简要回顾了MPC系统、工业物联网和数字孪生应用、生产同步的相关研究流程。第三节介绍了车间物流和制造同步的原则。第四节介绍了一个具有同步机制的工业物联网和数字双能毕业智能制造系统(GiMS)。第五节举例说明了一个案例研究,以验证所提出的概念和方法。最后,第六部分给出结论。
相关文献回顾
本研究涉及三个研究方向:1)MPC系统;2)工业物联网和数字双胞胎的应用;和
3)生产同步。对这些研究流进行了回顾,并对这项工作的动机进行了总结。
MPC系统
MPC以最有效的方式解决生产资源的获取、利用和分配,以满足客户的要求。在过去的几十年中,一系列的MPC系统被引入和发展。这一演变背后的驱动力与当时不断变化的商业环境密切相关。20世纪60年代初,为了在稳定的大批量生产环境中降低成本,ROP系统被引入。随着市场需求的多样化,MRP及其变体MRP II系统相继问世,成为制造企业MPC的主要选择。MRP系统的关键是通过引入物料清单(BOM)来识别最终产品和指定部件之间的关系。MRP II系统是通过纳入MPC的能力限制来增强MRP。从20世纪90年代初开始,制造业市场的竞争日益激烈,为了提高MPC的灵活性和效率,引入了集成结构的MES和ERP系统。MES和ERP系统由于高度整合了生产资源和生产活动的获取和分配,因此颇具吸引力。
但是,工业实践表明,这些MPC模块大部分在运营层面分别处理制造和物流,因此未能达到组织的目标和期望。两个主要的挑战在操作层面阻碍了制造和物流的整合,一个是制造和物流之间缺乏连贯的数据收集和信息共享,另一个是制造和物流之间不同步的组织和操作,因为这两个部门往往努力满足不同的目标,有单独和独立的优先级。
工业物联网和数字双胞胎的应用
物联网(IoT)一词最早由Kevin Ashton于1999年提出,并由麻省理工学院(MIT)自动识别中心(Auto-ID Center)的工作推广,最初的目标是设计具有EPCglobal的网络化RFID架构。物联网(IoT)是一种将物理事物连接到互联网上,并能够感知周围环境并自行将信息传输到网络的愿景。物联网技术在工业中的应用被称为工业物联网(IIoT),它为自动捕获和收集整个生产过程的实时对象级信息提供了一种有前景的方法。得益于无处不在的计算和连接,通过配备各种工业物联网设备,传统制造对象成为具有识别、传感和网络能力的智能对象,并可以相互通信和交互。在网络化工业可穿戴设备的支持下,现场操作人员的感知、通信和决策能力大大增强,信息支持实时性和多维度。
由工业物联网实现的无处不在的连接、数字化和共享到互联网或云使得创建数字等效表示成为可能,这被称为数字双胞胎,由Grieves在2003年首次引入。在此之后,数字双胞胎被解释为一个更广泛的概念,指的是制造对象、制造过程或生产系统的等价数字表示,随着物理对等物的变化而实时更新。随着实时可见性和信息共享的革命性力量,工业物联网和数字孪生正在彻底改变制造和物流经理组织和管理其生产资源和活动的方式。
生产同步化
同步一词在希腊语中指的是发生在同一时间或在时间上一致或一致。在自然科学、工程和社会生活的各种混沌系统中都遇到了同步的问题,这些系统往往具有同步化的倾向。在生产中,一个被广泛认可的接近同步概念的思想是准时制(just-in-time, JIT),而准时制的关键是生产过程的同步,因为它提倡所有的过程在必要的时间生产必要的部件,而手头只拥有维持各过程在一起所需的最小库存。JIT主要关注在重复制造环境下的执行,以经济的成本实现高生产率,以满足几乎相同的产品的大批量需求。但是随着市场环境的波动和产品生命周期的缩短,以自动化和CIM为核心的工业3.0时代发展起来的JIT已经不能满足工业4.0时代生产效率提高、灵活性和弹性提高、成本降低的按需产品和服务需求。在JIT概念之外,对于工业4.0制造的同步生产和运营管理概念也给予了一些关注。最近,Guo等提出了一种新的运营管理范式——同步,以实现工业4.0制造的生产同步。
研究动机
制造和物流之间的同步组织和操作是非常重要的,因为他们在整个生产过程中相互影响。在传统的生产策略中,在操作层面上将制造和物流分开处理,很难同时协调制造和物流,因为它们总是寻求分离和独立的优先级。生产同步的思想为理解物流与制造的相互作用提供了一个新的视角。本研究旨在探索生产和物流在运作层面的同步化,以及支持这一成就的相应原则、方法和技术。
车间物流和制造同步的原则
在整个生产过程中,制造与物流始终相互作用,并为实现车间物流和制造之间的同步,支持这一成就的四个原则将在本节中讨论:1)面向同步的制造系统;2)信息同步共享;3)同步决策;4)同步操作。
面向同步的制造系统
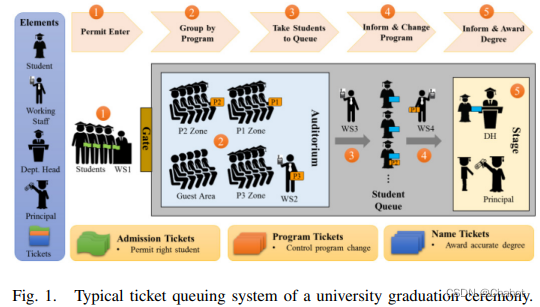
同步的存在与制造系统的性能相关,引起了制造企业的重视,这就要求面向同步的制造系统设计。大学毕业典礼已经成功举办了数百年。如图1所示,在整个过程中,通过实体标志、对讲机通信、各参与方之间的不同功能票等提供的信息可见性,实现了实时的去中心化协调,对于不同学位和证书项目的学生来说,整个仪式始终是有序的、稳健的,因为系统中的每个利益相关者都知道同步操作在哪里、何时、做什么、如何操作
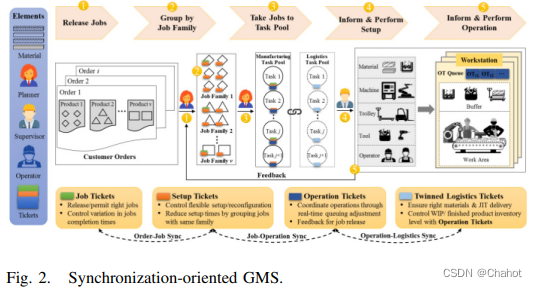
受毕业典礼的启发,我们提出了一种新颖的制造模式,即GMS,以简单、弹性的来组织和管理生产操作。如图2所示,我们将GMS扩展和概括为一种通用的制造模式,可以适用于不同的制造环境(如流水车间、作业车间和固定位置生产)。通过类比毕业典礼使用的三种入场券,三种入场券包括:1)工作入场券(JT);2)设置票(ST);3)作业票(OT)和缠绕物流票(LT),实现订单-作业同步,作业-作业同步和作业-物流同步。具有同步原理的GMS具有实现面向同步的MPC策略的前景。
信息同步共享
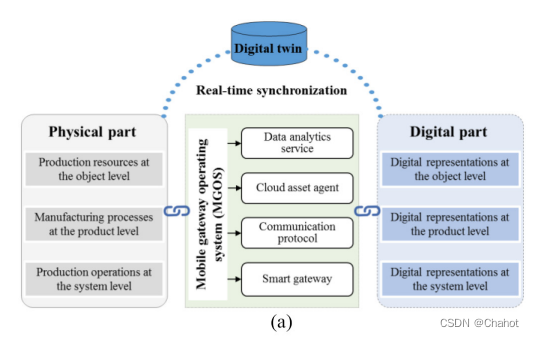
实现车间物流与制造同步需要实时信息的可见性和共享性。根据数字孪生的概念,如图3所示,提出了同步的信息共享参考模型,物理部分、数字部分和移动网关操作系统(MGOS)实时地将它们捆绑并同步。

从生产和运营管理的角度来看,生产资源(如材料、机器、小车和工具)和活动(如制造、检查、装配和交付)被分为对象级、产品级和系统级,因为具有不同信息集的操作应该以不同的频率同步到其目的。如图3(a)所示,MGOS被设计为一个基于云的轻量级中间件,将物理部件虚拟化为一个等效的数字表示,并实时同步它们。MGOS一般包括实现物联网设备通用即插即用管理的硬件(如智能网关)和从异构多源数据中传输和提取信息以创建不同级别的同步数字表示的软件(如通信协议、云资产代理、数据分析服务)。以齿轮箱组件为例,图3(b)显示了以基于xml的文件在产品级别表示的同步信息共享模型模板。它包括一个轻量级的三维模型(如序列ID、类型、特征和约束)、辅助和导航(如推荐排序、公差、压力、粗糙度、扭矩和松紧)、检查(如实际排序、公差、压力、粗糙度、扭矩和松紧)、质量统计(如开始时间、结束时间、通过率、返工率和意外报告)和状态(如位置、操作员ID、工具ID和模块ID)。通过信息共享模型可以实现产品装配过程及其等效数字表示之间的实时同步。
同步决策
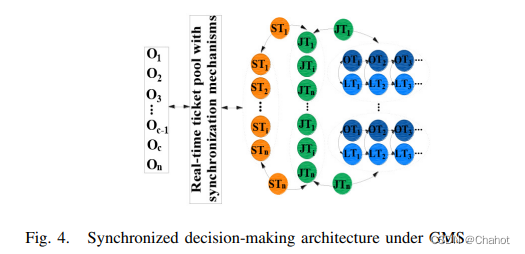
为了实现制造与物流的同步,提出了一种基于GMS的同步决策体系结构。如图4所示,提出了具有同步机制的实时票务池概念,与GMS下的JTs、STs、OTs和交织lt进行决策同步。票务池是一个序列逻辑实体(例如,作业和操作)的表示。如图4所示,对于一组客户订单 Ø 1 , O 2 , O 3 , … , O c − 1 , O c , O n {Ø_1, O_2, O_3,…,O_{c-1}, O_c, O_n} Ø1,O2,O3,…,Oc−1,Oc,On,通过对池中不同类型的票队列进行分散协调,实现与制造和物流规划控制相关的协调决策。JTs和STs队列决定作业集群以及作业和设置任务执行的顺序。OTs和LTs队列决定了特定生产工作的操作和物流任务的顺序。
同步操作
JTs、STs、OTs和twined lt这三种票据在操作同步中发挥着关键作用,具有简单和弹性。JTs的目的是释放/允许正确的工作,考虑到客户的需求和生产能力,只有合格的工作,并拥有正确的JTs,才允许在一定的时间范围内生产。为了打包属于同一客户订单的作业,通过控制同一订单中所有作业的完成时间变化,实现作业同步。STs设计用于在生产不同产品系列或引入新产品时控制灵活的设置/配置。在STs的帮助下,可以提前通知设置并在正确的时间执行。OTs通过实时排队调整来协调操作。缠绕lt的设计是为了确保准确的材料和准时交货。通过对OTs和Twined lt的控制,可以实现操作流程和物料流的同步,例如通过实时调整OTs和lt的队列,可以降低在制品和成品的库存水平。
具有同步机制的工业物联网和数字孪生GiMS
遵循车间物流和制造同步的原则,在本节中,提出了一个四层框架,称为GiMS,在操作层面实现车间物流和制造同步。
工业物联网与数字孪生GiMS总体框架
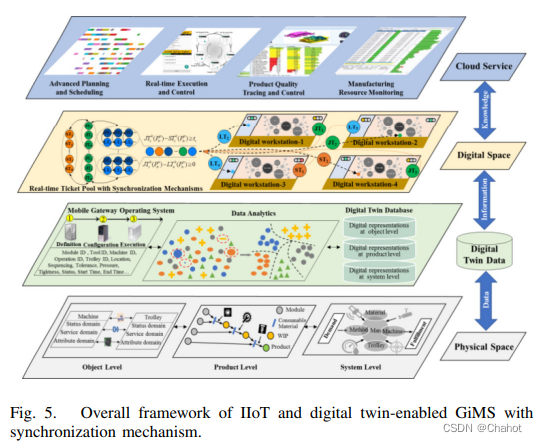
图5展示了具有同步机制的工业物联网和数字孪生GiMS的总体框架。它由四层组成:1)物理空间层;2)数字孪生数据层;3)数字空间层;4)云服务层。在物理空间上,主要的车间物流和制造资源和活动被分为对象、产品和系统级别。数字孪生数据将物理空间和数字空间联系在一起,并与实时数据同步。在MGOS的支持下,具有适当信息集的数字表示可以分别在对象级、产品级和系统级传输和提取。例如,要创建工具的数字表示以在对象级别反映其物理对应对象,应包含一组适当的信息,如对象ID、属性(例如,分类、类型、模型和扭矩)、服务(例如,打开和关闭)和当前状态(例如,位置、最后的主机、运行状况级别和功率级别)。而要在产品层面创建装配过程的数字表示,则需要更多的信息(例如,三维模型、装配顺序、装配精度和质量统计)。在gis中,当它们的对应对象(例如,一个对象、一个过程和一个生产系统)以同步的方式改变时,具有适当信息集的数字表示将不断更新。
在数字空间中,引入了具有同步机制的实时票务池来控制车间物流与制造任务的同步。利用数字孪生数据提供的实时信息可见性和可追溯性,使系统可共享工作站的实时状态。因此,通过实时票务池中基于同步机制的JTs、STs、OTs和交织LT的协调,可以实现票务池驱动的车间物流和MPC的全局协调和优化。云服务层基于数字孪生数据提供的有用信息,提供APS (advanced planning and scheduling)服务、实时执行与控制服务、产品质量跟踪与控制服务、制造资源监控服务等多种按需云服务。这些云服务集成了有价值的知识(如优化、预防和自主决策),可以作为促进决策制定和日常运营的有用工具,因为经理和现场操作人员可以通过智能手机或平板电脑轻松访问它们。
简而言之,工业物联网和数字双能gis的特点可以概括如下。
1)实现工业物联网和数字双驱动同步信息共享,物理部分与数字部分实时同步。
2)将票池驱动的同步机制与车间物流与制造的同步决策相结合。
3)将包含适当信息集的数字票据封装到云服务中,供管理者和现场操作人员实现同步操作。
车间物流与制造同步机制
在这一部分中,介绍了同步机制,旨在实现工业物联网和数字双能制造环境下的车间物流和制造同步。车间物流与制造同步同步机制的思想类似于滚动视域的柔性生产计划,将规划视域划分为多个时间区间,实现小规模优化模型和快速求解,适用于具有周期滚动的实际工业应用。该同步机制的目的是实现准确的现场数据的实时反馈,车间物流和制造之间的实时同步交互。
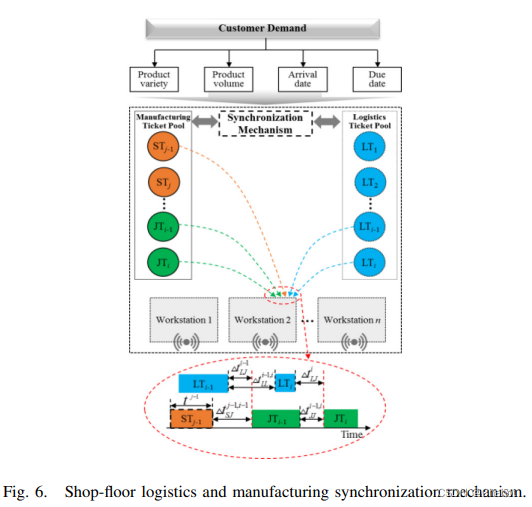
如图6所示,考虑客户需求(如产品种类、产品数量、到货日期、到期日等),同步机制的目标是通过网络化工作站的不同票的协调,实现车间物流与制造之间的同步交互。如图6所示,为了讨论的简单性,我们只举两个相邻的作业(JTi, JTi -1)的例子,它们属于同一个产品家族,将在可用的工作站2中产生。在此场景中,由于在开始生产不同产品品种之前需要进行设置,因此只有在设置任务(STj-1)和相应的物流任务(LTi-1)完成时才能启动作业任务(JTi-1)。
同步机制的核心思想是通过同步控制来调整作业任务、设置任务和物流任务的节奏。
- △ L J i − 1 △_{LJ}^{i-1} △LJi−1(作业任务JTi-1开始时间与物流任务LTi-1结束时间之间的间隔),
- △ L J i △_{LJ}^{i} △LJi(作业任务JTi开始时间与物流任务LTi结束时间之间的间隔),
- △ L L i − 1 , i △_{LL}^{i-1,i} △LLi−1,i(物流任务LTi开始时间与物流任务LTi结束时间之间的间隔)
- △ J J i − 1 , i △_{JJ}^{i-1,i} △JJi−1,i(作业任务JTi开始时间与作业任务JTi结束时间之间的间隔)
- △ S J j − 1 , i − 1 △_{SJ}^{j-1,i-1} △SJj−1,i−1((作业任务JTi -1开始时间到设置任务STj -1结束时间的间隔)
- t j − 1 t^{j-1} tj−1(如果作业任务需要设置,则设置任务STj-1的设置时间)。
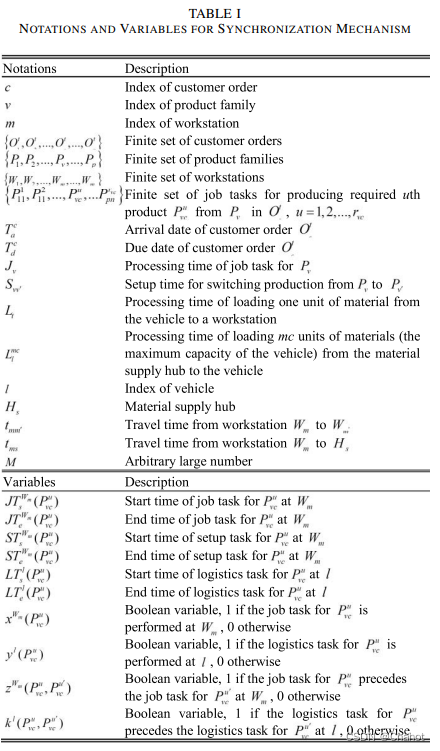
在给出同步机制的数学模型之前,我们首先定义表示法(如表I所示),并给出问题的形式化描述。在特定的时间范围t内,考虑一组客户订单
O
1
t
,
O
2
t
,
.
.
.
O
c
t
,
.
.
.
O
n
t
O^t_1,O^t_2,...O^t_c,...O^t_n
O1t,O2t,...Oct,...Ont,每个订单
O
c
t
O^t_c
Oct包含一系列产品族{P1, P2,…,Pv,…, Pn}, Pv所需的量rvc。每个订单
O
c
t
O^t_c
Oct都与指定接收时间的到货日期
T
a
c
T^c_a
Tac和指定到货日期
T
d
c
T^c_d
Tdc相关联预计完成的时间。假设每一个产品Pv的生产,需要一个加工时间为Jv的工作任务,在一个工位进行制造或装配,需要一个加工时间为Lt的物流任务,从车辆装载到工位的物料,需要一个加工时间为L的设置任务,在一个工位从Py切换到Py生产时,需要一个设置时间为Sv’v的设置任务。该车的最大运力为mc单位的物料,即该车一次最多只能运送mc单位的物料,当该车空载时,该车必须返回供料枢纽装载所需mc单位的物料。将mc单元的物料从物料供应枢纽装载到车辆上的处理时间是
L
l
m
c
L_l^{mc}
Llmc。需要车辆将所需材料从工作站Wm的位置运送到工作站Wm‘的旅行时间tmm’,以及车辆的旅行时间将物料从Wm工位送到物料供应中心Hs,为tms。在时间范围t内,有mt工作站可用。任务是不可抢占的;对于每个可用的工作站,只有一个设置任务或作业任务可以随时在其上处理,对于每一辆可用的车辆,任何时候只能在其上处理一项物流任务,每一项任务一旦开始,就必须完成。我们假设车辆最初位于物料供应枢纽,在相应的作业任务开始前,所需的物料必须装载到工作站。
设置任务或作业任务可以随时在其上处理,对于每一辆可用的车辆,任何时候只能在其上处理一项物流任务,每一项任务一旦开始,就必须完成。我们假设车辆最初位于物料供应枢纽,在相应的作业任务开始前,所需的物料必须装载到工作站。
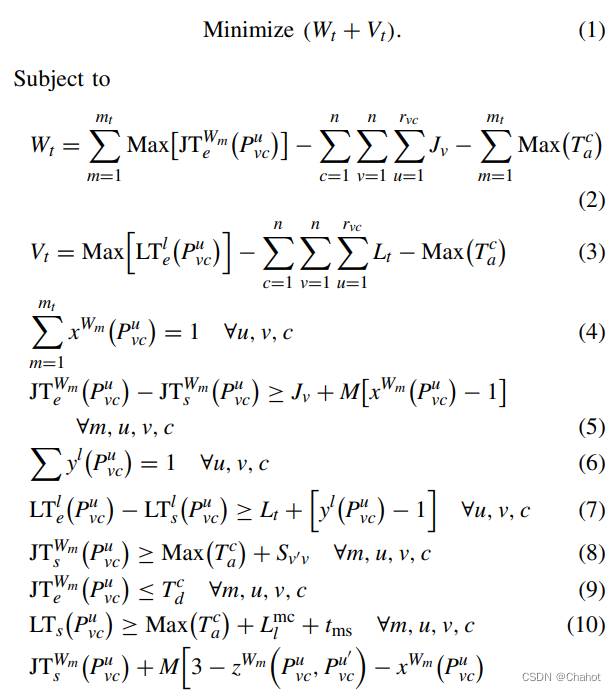
式(17)(20)表示了决策变量的范围。式(2)为作业任务的总等待时间和设置时间。式(3)为物流任务的总等待时间。式(4)和式(5)表示,每个作业任务可以在一个且只能在一个可用的工作站上进行处理,一旦开始,就必须完成。式(6)和式(7)表示,每一项物流任务可以在一辆且只有一辆可用的车辆上进行处理,一旦启动,就必须完成。式(8)表示,第一个作业任务需要一个设置任务。式(9)表示每个作业任务的结束时间不应超过该订单的允许时间。由式(10)可知,当车辆离开物资供应枢纽时,可以开始第一个物流任务。式(11)和(12)表示工作任务是非优先的;对于每个可用的工作站,任何时候只能在其上处理一个作业任务,当从一种产品类型的生产切换到另一种不同的产品类型时,需要一个依赖于顺序的设置任务。式(13)和(14)表示,对于每辆可用的车辆,在任何时间,它只能处理一个物流任务,需要一个从当前工作站到下一个作业任务将要执行的工作站的旅行时间。由式(15)可知,车辆一次最多只能运送mc单位的物资,当车辆空载时,必须回到物资供应枢纽装载所需mc单位的物资,然后才能执行下一个物流任务。式(16)表示只有当相应的物流任务完成后才能开始作业任务。
从本质上讲,上述问题可以看作是一个时间索引混合整数规划(MIP)问题,具有强意义上的NP-hard。为了解决这类组合优化问题,人们提出了很多方法,如精确算法、启发式算法和元启发式算法。优化方法没有限制,采用哪种算法取决于问题的规模、精度要求和求解成本。对于规模较小的问题,可以采用精确方法(如分支和切割算法)在有限时间内获得最优解,而对于复杂或规模较大的问题,可以采用启发式和元启发式方法(如贪婪算法、进化算法)获得接近最优解。
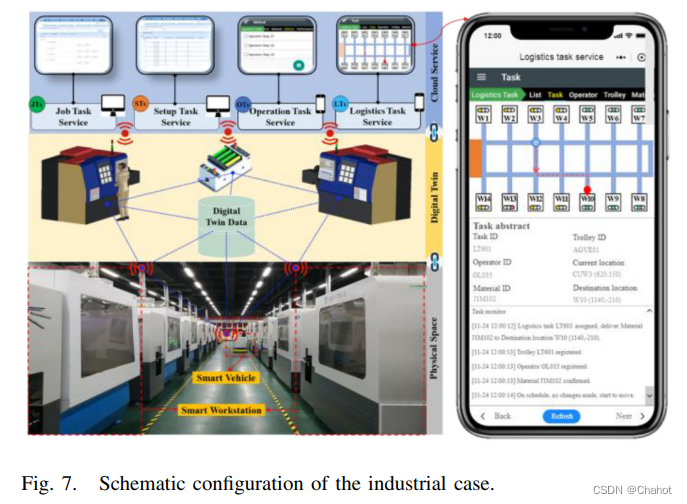
为了验证所提出的概念和方法的有效性,本节将介绍一家刀具制造商的工业案例。如图7所示,该公司典型作业车间的配置包括一系列制造各种刀具的工作站和一个移动的物料搬运系统。该公司拥有高度自动化的计算机数控(CNC)机器和自动导向车辆(agv)。
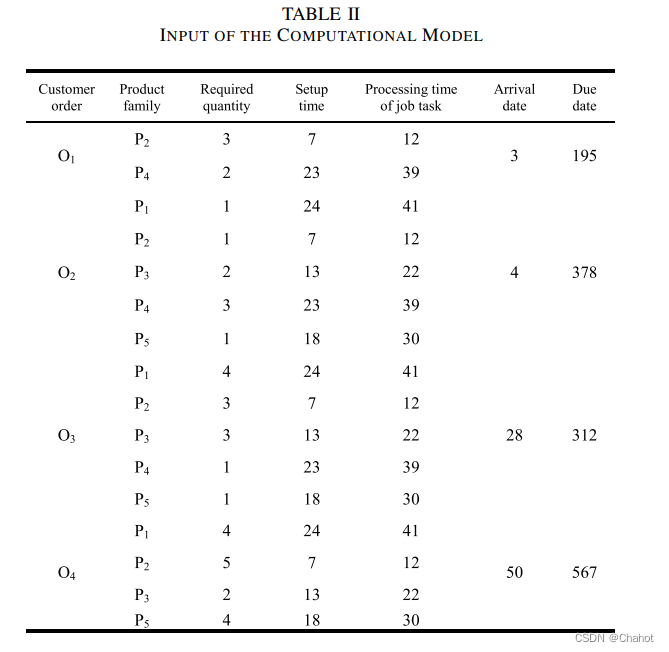
按照工业物联网和数字双能gis的框架,工业物联网设备,包括用于识别和跟踪对象级运动的基于蓝牙低能耗(BLE)的ibeacon标签,以及由信用卡大小的微型计算机芯片嵌入式BLE模块和无线通信模块组成的创新智能网关,都部署了MGOS,实现了整个生产过程的实时可见性和信息共享。遵循GMS原则,设计了JT、ST、LT、OT来组织和管理车间物流和车间制造任务。基于数字化双驱动同步信息共享参考模型,将车间物流和制造的数字化表征封装为服务,包括作业任务服务、安装任务服务、物流任务服务和操作任务服务,部署在阿里云ECS上,管理者和现场操作人员可通过固定终端和移动终端访问。带有后勤任务服务的微信小程序的快照如图7所示。通过提出的同步机制,实现了车间物流与制造的同步决策。在采用车间物流与制造同步策略之前,公司基于最早到期日(EDD)的制造与物流分离策略管理生产活动。通过实验验证了该同步机制的性能。实验测试数据是基于从该公司收集的历史数据生成的,具有无量纲时间单位。在本例中,在特定的时间范围内,4个客户订单需要5个产品族的40个产品,相关信息列在表II中。
在小型问题的情况下,可以根据提出的MIP模型获得可行的解决方案。但对于大型问题,由于存在大量的二元变量和约束,MIP模型的计算时间太长,无法满足实际生产需求。对于这类具有复杂时空约束的问题,有研究者成功地开发了一种有前景的方法,即约束规划(CP),它在各种组合优化问题中优于MIP。为满足现实生活中大规模和小规模的车间物流与制造同步问题的快速决策需求,拟建立与MIP模型(1)~(20)等价的CP模型
| 变量 | 意义 |
|---|---|
| J T ( P V C U ) JT(P^U_{VC}) JT(PVCU) | 生产所需产品需要的作业区间变量 |
| P V C U P^U_{VC} PVCU | 生产所需的产品 |
| J T W m ( P V C U ) JT^{W_m}(P^U_{VC}) JTWm(PVCU) | 可选的区间变量,在规定时间内,对于每个可能分配的工作,分配到每个工作站的比那里;如果存在,则这个值等于 J v J_v Jv |
| T a c + S v ′ v T^c_a+S_{v'v} Tac+Sv′v | 对于每一个可能的工作分配 J T ( P V C U ) JT(P^U_{VC}) JT(PVCU)到每个工作站的最小的开始时间 |
| T d c T_d^c Tdc | 对于每一个可能的工作分配 J T ( P V C U ) JT(P^U_{VC}) JT(PVCU)到每个工作站的最大的结束时间 |
| L T ( P V C U ) LT(P^U_{VC}) LT(PVCU) | 可选变量,用于必须作业P的供应链作业/物料处理 |
| L T V l ( P V C U ) LT^{V_l}(P^U_{VC}) LTVl(PVCU) | 可选的区间变量,在一个具体的时间段内,为每个可能的作业分配到规定尺寸的载具的变量 |
| T a c + L l m c + t m s T^c_a+L_l^{mc}+t_{ms} Tac+Llmc+tms | 对于每一个可以分配的物流任务,分配到规定载具的最小时间 |
| T d c T^c_d Tdc | 对于每一个可以分配的物流任务,分配到规定载具的最大时间 |
| L t L_t Lt | 规定车的尺寸 |
| W m ( J T ( P V C U ) ) W_m(JT(P^U_{VC})) Wm(JT(PVCU)) | 表示Wm工作站上一组区间变量JT上的总阶数。 |
| V l ( L T ( P V C U ) ) V_l(LT(P^U_{VC})) Vl(LT(PVCU)) | 表示Vl载具上一组区间变量在LT上的总阶数(序数) |
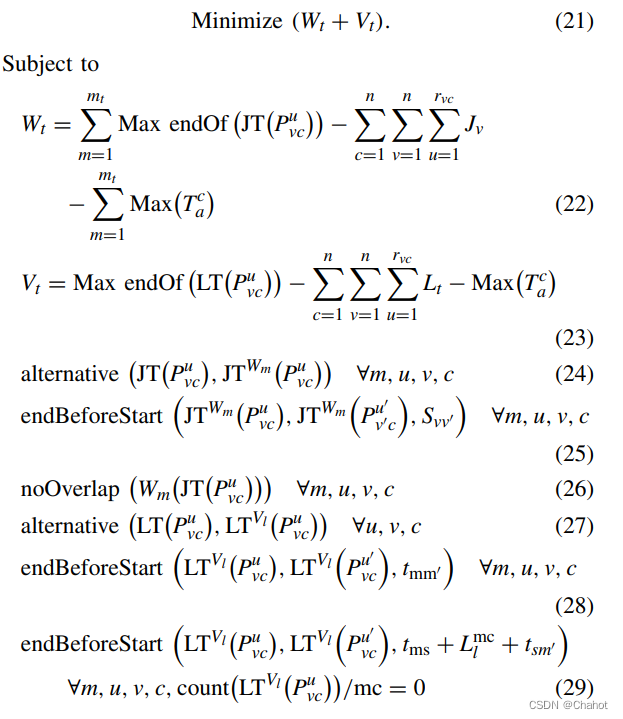
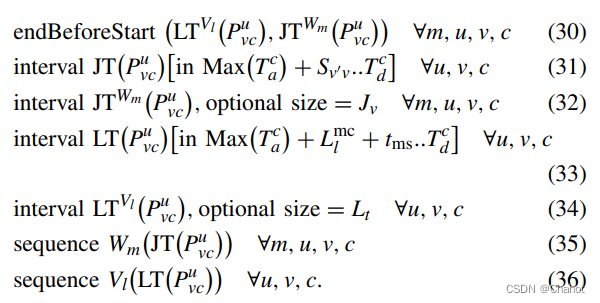
式(21)表示问题的目标。式(22)为作业任务的总等待时间和设置时间。式(23)为物流任务的总等待时间。式(24)式(26)保证了作业任务的非抢占性,每个作业任务可以在一个且只有一个可用的工作站上进行处理,一旦开始,就必须完成,从一种产品类型切换到另一种不同的产品类型时,需要一个顺序相关的安装任务。式(27)和(28)保证了每个作业任务可以在一辆且只有一辆可用的车辆上进行处理,一旦开始,必须完成,并且需要一个从当前工作站到下一个作业任务将要执行的工作站的旅行时间。由式(29)可知,车辆一次最多只能运送mc单位的物资,当车辆空载时,必须回到物资供应枢纽装载所需mc单位的物资,然后才能执行下一个物流任务。式(30)保证只有当相应的物流任务完成后,作业任务才能开始。
为了评价所提出的CP模型的性能,在MIP模型和CP模型之间进行了各种数值实验。数据集由表II生成,包含5次所需产品和对应的到期日,其中5次{O1, O2, O3, O4}对应的到期日为{975,1560,1890,2835},总共包含200个岗位。数值实验采用数据集中随机选取的20个不同工作站(如1、3、6、9)和工作(如10 ~ 200)的实例。在该工业案例中,AGV的最大容量为10单位物料,从供料枢纽将10单位物料装载到AGV的加工时间为10。AGV从工位m到工位n的行程时间为|m-n|,从供料枢纽位置到工位n的行程时间为n。AGV向工位装载物料的任意物流任务处理时间为3。MIP和CP模型都是在IBM ILOG CPLEX 12.10.0版本中编码和解决的,在64位机器上使用Intel Core i7-10510U CPU, 2.30 ghz处理器和16.00 gb RAM。在CPLEX中,MIP和CP模型的默认求解方法分别是分支切割法(结合切割平面和分支定界法)和约束传播法(结合大邻域搜索产生高质量的解,结合故障定向搜索证明不可行性或最优性)
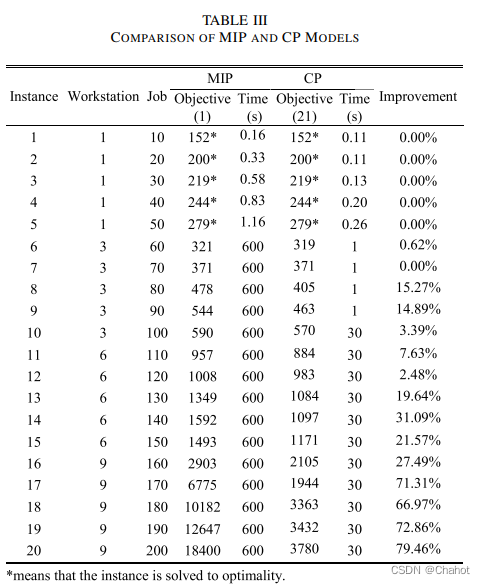
表III显示了MIP和CP模型的目标和计算时间的比较。第2列和第3列分别用工作站数量和作业数量标识实例规模。间隙([目标(1)-目标(21)/目标(1)]栏记录了在限定时间内CP模型相对于相应MIP模型的改进情况。考虑到实际生产决策的需要,CP模型中,对于小型实例设置为1 s,对于大型实例设置为30 s,对于所有MIP模型设置为600 s。表III表明,对于相对较小的实例(如1、2、3、4和5),MIP模型和CP模型都能找到最优解,但CP模型比相应的MIP模型所需的计算时间更少。对于其他情况,所有CP模型都比MIP模型具有更低的目标值和更少的计算时间。注意,对于拥有超过6个工作站和170个工作的大型实例(例如,17、18、19和20),CP模型在30秒内显示了解决方案的显著改进(例如,平均72.65%),而对应的MIP模型只有600秒。本文提出的CP模型在车间物流和制造同步问题上大大优于MIP模型,根据表2的相关信息,我们将在接下来的实验测试中采用该模型。
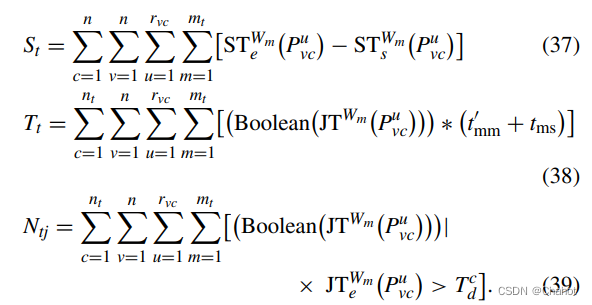
为了评估拟议的同步机制的性能,除了原始生产(OP)外,还添加了两个最受欢迎的规则,包括:1)先到先得(FCFS)和2)最短过程时间(SPT),作为性能标准的基准。之所以采用FCFS和SPT,是因为它们是行业中最常用的规则,易于实施和实践,因此在许多研究[34]中被用作通用基准。除了(22)中定义的Wt和(23)中定义的Vt外,其他三个度量包括:1)(37)中定义的总启动时间(St);2)总行程时间(Tt)定义在(38);和3)计算并比较(39)中定义的延迟作业总数(TNtj)
表IV显示了MLSP与OP、FCFS和SPT相比在建议措施方面的表现。与OP、FCFS和SPT相比,有三个可用的工作站,MLSP显示作业任务的总等待时间和设置时间最低,为194,物流任务的总等待时间最低,为62。减少了172台工作站的安装时间和减少了行程时间,车辆上的22是支持MLSP改进的证据。与OP和EDD相比,SPT在缩短设置时间方面表现较好,这与之前的研究[35]一致,但仍大于MLSP。值得注意的是,在MLSP、OP、FCFS和SPT场景下,延迟作业分别为0、12、18和8个,这意味着本文提出的同步机制能够在有限的生产资源下更有效地实现按时交付。
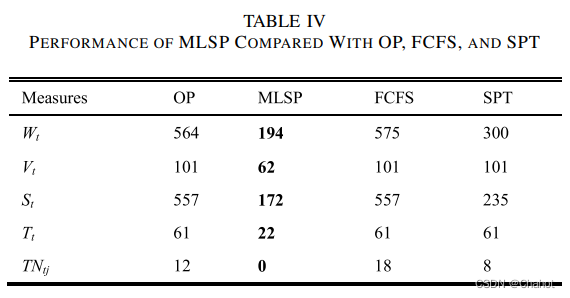
图8显示了各工作站采用实时ST、JT和LT队列的MLSP的详细结果。从图中可以看出,基于所提出的同步机制,通过控制设置任务、作业任务和物流任务之间的交互,提高了车间物流和制造任务的同步。通过工作和物流任务的协调,减少了车辆的行驶时间,随着及时的物料供应和同一产品系列的集群生产,大大减少了工作站的等待时间和安装时间。
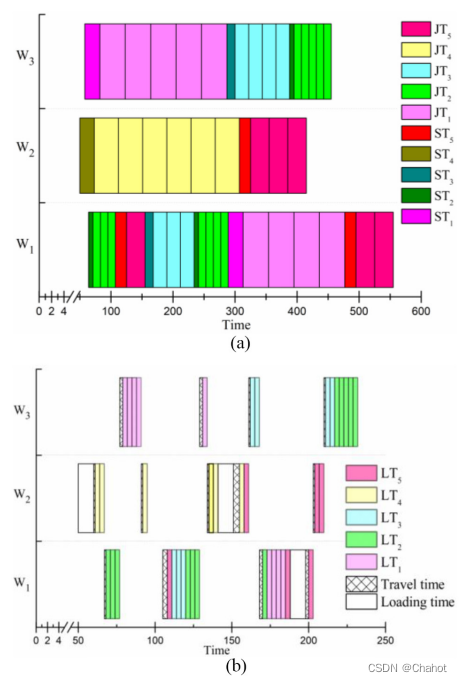
从案例研究中可以观察到,车间物流和制造之间的同步组织和操作可以显著提高生产系统的性能,减少等待时间、安装时间和旅行时间。之间的结合使能技术和创新的运营管理战略使得在工业4.0制造环境下发展具有竞争力的MPC战略的可行性。
结论
为了实现制造和物流之间的一体化组织和操作,本文介绍了车间物流和制造同步的概念,并介绍了支持这一成就的四个原则。为了验证所提出的概念和方法的有效性,进行了一个来自刀具制造商的工业案例。本研究可以总结出三个主要贡献。首先,提出了车间物流与制造同步的概念,提出了面向制造系统的同步、信息共享同步、决策同步和操作同步四项原则。其次,在此基础上,提出了工业物联网和数字化双使gis的总体框架,实现了车间物流和制造同步。第三,在GiMS下,建立了与MIP模型等价的基于cp的同步模型,实现了现实生活中车间物流和制造同步问题的快速决策。通过对案例公司的观察和分析,可以看出所提出的概念和方法在关键绩效指标方面的优势。同时也存在一定的局限性,今后的工作将继续进行。提出的物流和制造同步模型可以通过考虑更多的操作(例如,材料采购和最终产品交付)进行扩展。在实际生产中,意外干扰(如机/车故障、急单等)的发生是不可避免的,我们将研究考虑生产干扰的同步机制。此外,所提出的模型只在刀具制造环境下进行验证,更多的实验测试需要在不同的现实制造环境下进行(如流水车间和固定位置装配)。
参考文献: Guo, Daqiang, et al. “Synchronization of shop-floor logistics and manufacturing under IIoT and digital twin-enabled graduation intelligent manufacturing system.” IEEE Transactions on Cybernetics (2021).
最后
以上就是呆萌小甜瓜最近收集整理的关于工业物联网:基于数字孪生的车间物流与制造智能同步制造系统背景相关文献回顾车间物流和制造同步的原则具有同步机制的工业物联网和数字孪生GiMS结论的全部内容,更多相关工业物联网:基于数字孪生内容请搜索靠谱客的其他文章。

![前端04.数字孪生实现方案数字孪生实现方案(针对研究对象具备复杂逻辑 需要外部数学模型或仿真平台[simulink等])](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)






发表评论 取消回复