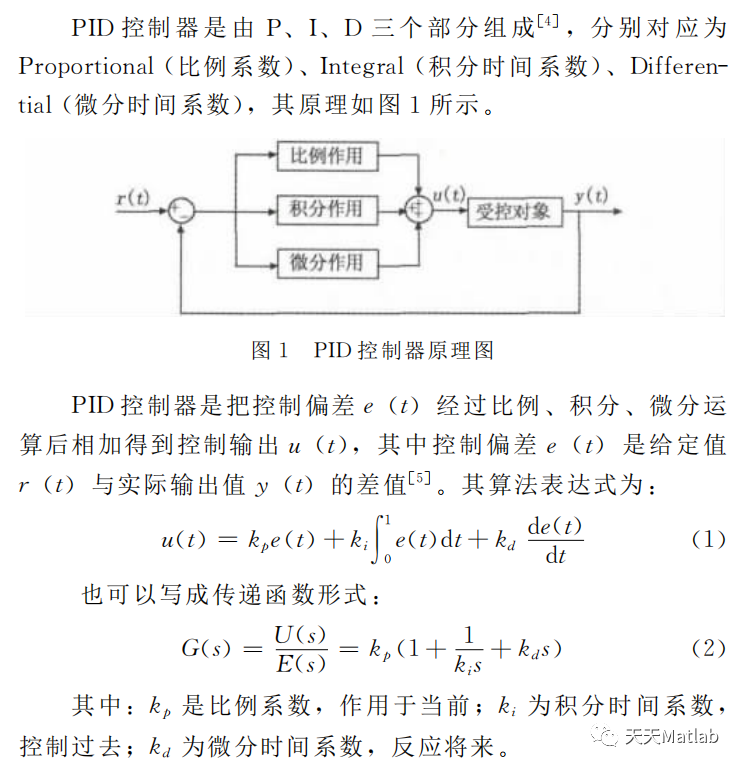
1 简介
PID控制器具有原 理 简 单、实现容易和鲁棒性强等特点,从而广泛应用于工业控制过程中,其在工业生产控制中的地位十分重要。PID控制器的性能指标完全取决于 3个 参数 Kp、Ki、Kd 是否合理,因此优化 PID控制器的参数成为 PID 控制器优化设计的核心,目 前 PID 控制器参数优化已经成为自动
控制领域研究的热点。当前,PID控制器参数优化方法主要基于传统控制理论技术和手动方法进行,过程如 下:
1)根 据 被 控 制 对 象 建 立 数学模型;
2)对数学模型进行分析;
3)根据分析结果来设计出合适的控制器。因 此 传 统 PID 控制器参数优化后,参 数不 具备自适应环境变化的能力。
近年来,为了 弥 补 传 统 PID 控 制器 的 不 足,完 善 并 使 其达到理想的控制效果,学者利用各式技术,尝试了多种控制方法,其中效果最好的是利用智能优化算法,比如遗传算法、粒子群算法及萤 火 虫 算 法 等,优 化 PID 控 制器,通 过 这 种 方 式设计的 PID控制器被称为智能 PID 控 制器,并已取得了很多成功的应用.
2 部分代码
% Script 布谷鸟算法,求解函数最小值clear all ;close all ;clc ;N = 25; % Number of nests(The scale of solution)D = 10 ; % Dimensionality of solutionT = 200 ; % Number of iterationsXmax = 20 ;Xmin = -20 ;Pa = 0.25 ; % Probability of building a new nest(After host bird find exotic bird eggs)nestPop = rand(N,D)*(Xmax-Xmin)+Xmin ; % Random initial solutionsfor t=1:Tlevy_nestPop = func_levy(nestPop,Xmax,Xmin) ; % Generate new solutions by Levy flightsnestPop = func_bestNestPop(nestPop,levy_nestPop); % Choose a best nest among new and old nestsrand_nestPop = func_newBuildNest(nestPop,Pa,Xmax,Xmin); % Abandon(Pa) worse nests and build new nests by (Preference random walk )nestPop = func_bestNestPop(nestPop,rand_nestPop) ; % Choose a best nest among new and old nests[~,index] = max(func_fitness(nestPop)) ; % Best neststrace(t) = func_objValue(nestPop(index,:)) ;endfigureplot(trace);xlabel('迭代次数') ;ylabel('适应度值') ;title('适应度进化曲线') ;img =gcf; %获取当前画图的句柄print(img, '-dpng', '-r600', './img.png') %即可得到对应格式和期望dpi的图像
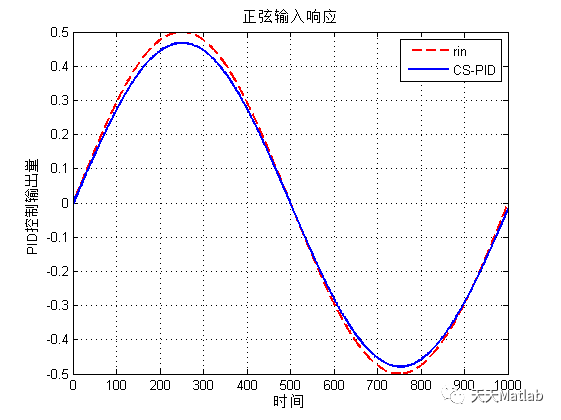
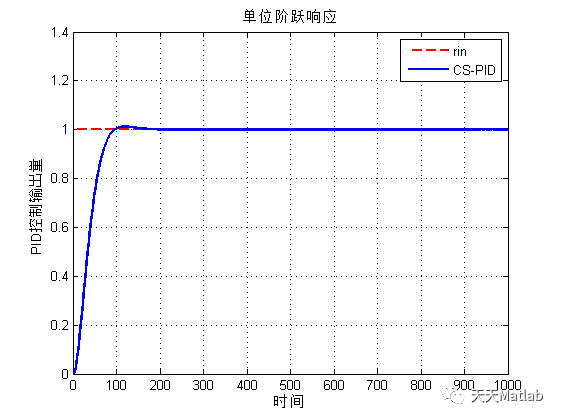
3 仿真结果
4 参考文献
[1]王庆喜, 储泽楠. 基于动态布谷鸟搜索算法的PID控制器参数优化[J]. 计算机测量与控制, 2015, 23(4):4.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
最后
以上就是坚强摩托最近收集整理的关于【PID优化】基于布谷鸟算法PID控制器优化设计含Matlab源码的全部内容,更多相关【PID优化】基于布谷鸟算法PID控制器优化设计含Matlab源码内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复