文章目录
- 无人机集群复现算法模型对比
- 1 参数
- 1.1 原论文包含的参数
- 1.2 优化论文包含参数
- 2 模型
- 2.1 原论文模型受到的作用力
- 2.2 优化模型中受到的力
- 3 评估指标
- 3.1 原论文中评估指标
- 3.2 优化论文中的评估指标
- 3.2.1 适应度函数为
- 4 CMA-ES
无人机集群复现算法模型对比
1 参数
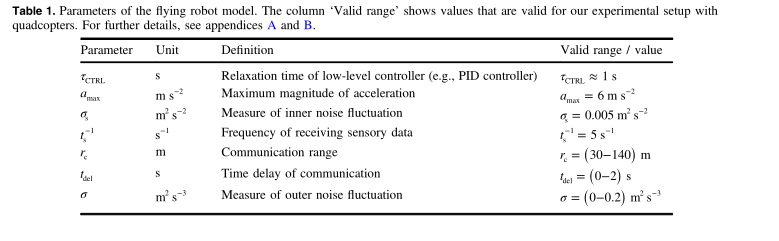
1.1 原论文包含的参数
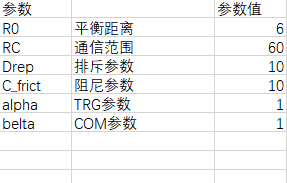
- 惯性参数 τ tau τCTRL,智能体需要从当前速度vi转变成期望速度vd,需要一定时间,加速度最大值amax,加速度取值:v差/ τ tau τ,amax中小者,论文中vmax取值为6m/s2
- 内部噪音:传感器测量周围智能体位置和速度的精度,GPS测量的值存在误差,该误差用一个随机函数表示: η eta ηis ( t ) (t) (t),速度测量误差e呈现高斯分布&&标准差为σs
- 传感器数据刷新率,每秒获取多少次邻居的位置状态信息。0.2s/fresh,刷新率5s-1
- 通信范围:rc,无人机之间的通信是在一定范围内的,当其距离大于rc,无人机之间不能相互通信。
- time-delay:时间延迟,本文的时间延迟是固定的,发送与接受的途中需要传输时间。
- 一般噪音项:
η
eta
ηit
(
t
)
(t)
(t)具有标准差σ的(高斯)外噪声项ηit被加到单位加速度上。该术语是不可预测的环境影响的模型,例如低层控制算法的风补偿的波动(直接作用于加速度),模拟随机外界影响,高斯噪音。
1.2 优化论文包含参数
- 环境参数均一致:
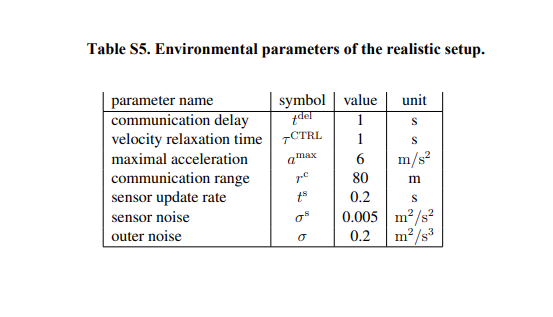
新论文中环境参数与前论文一样,都包含这6个环境参数。 - 优化群体大小:100
- 终止条件:150代
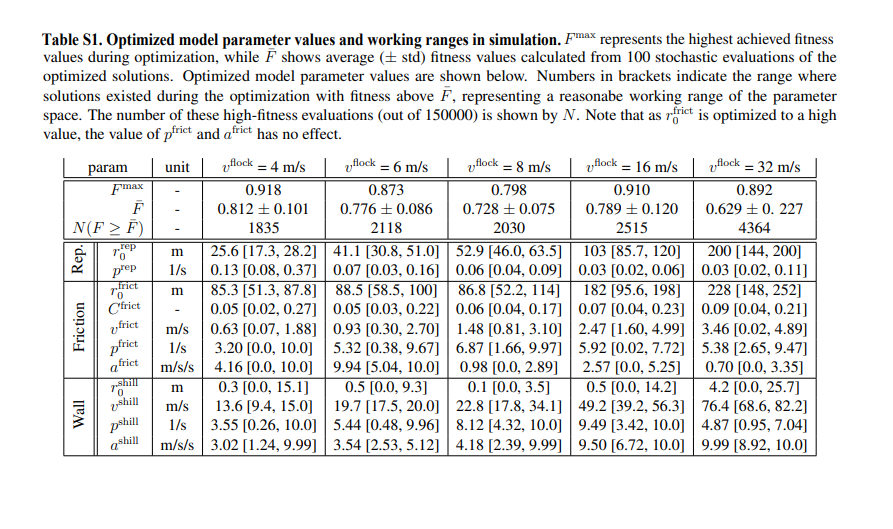
新增的11个参数,包括排斥力参数,吸引力参数和墙壁(障碍物作用)参数。
2 模型
2.1 原论文模型受到的作用力
-
目标牵引力,包含局部目标牵引力和全局目标牵引力两部分。
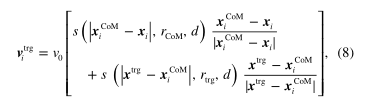
x x xiCoM表示局部中间点,局部中心点牵引物体向中间靠拢,
x x xtrg是目标点位置,表示局部中心点在向目标点靠拢 -
排斥力
排斥力和速度差成正比,速度越对齐,排斥力越小
排斥力和距离成反比,距离大则排斥力小 -
吸引力(对齐力)
当前速度与期望速度差越大,则吸引力越大,二者对齐力越大。
s(x, R, d)是一个平滑曲线,降低力的大小
R是arena形状定义函数 -
最后添加了一个生成特定形状的力,以圆形为例,生成的力作用于每个智能体,让智能体排列在圆的各个位置上,与中心角度为2* π pi π / 智能体个数N
2.2 优化模型中受到的力
-
排斥力
两个参数:prep和prep0 -
对齐力
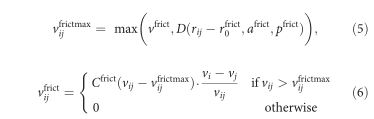
其中包含一个速度衰减方程D,
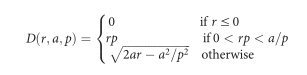
衰减值越大,表明对齐作用力越大,当两个智能体距离一定,只要速度差在一定范围内,二者间对齐力会比较小。
-
与墙壁和障碍物作用
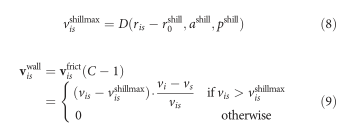
如果二者的速度差大于临界值,则会产生该墙壁作用力。 -
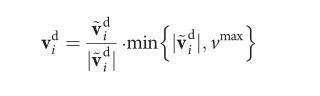
最后,添加上一个自驱动力,该力的方向为智能体实际速度的方向,大小为vflock

添加上一个速度限制,让速度最大为vmax
3 评估指标
3.1 原论文中评估指标
- 速度相关性,

对于不同的阻尼系数Cfrict, Ψ Psi Ψscal的取值不同,要让该值尽可能大。
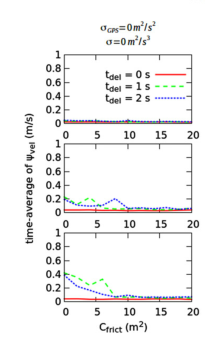
- 平均速度,
当在hover状态,D取不同的值,平均速度会有不同的震荡情况,当 σ sigma σGPS=0, σ sigma σ=0, Cfrict取得不同值的时候, Ψ Psi Ψvel震荡幅度也会不同,我们目标是让震荡幅度趋近于0。

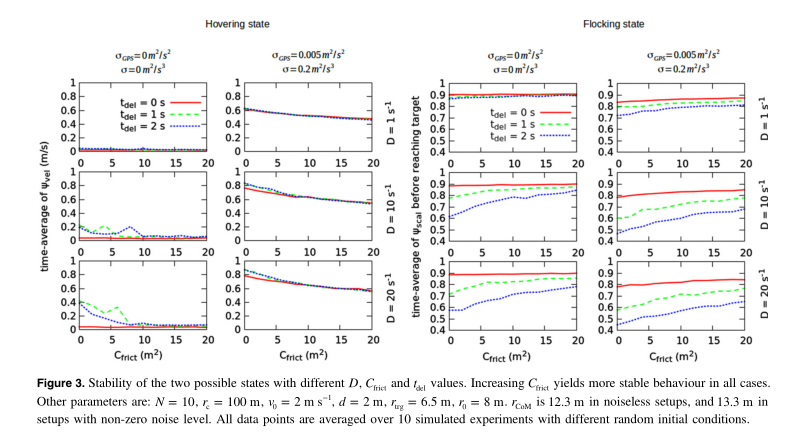
- 这些评估参数的目的是确定模型中的各类系数,如排斥系数D,阻尼系数Cfrict,尽量让评估参数处于较为稳定的目标区间,从而提升系统的稳定性。
源代码中使用的参数为:
3.2 优化论文中的评估指标
ϕ phi ϕcorr:速度相关性指标
ϕ phi ϕcoll:碰撞评估指标
其中rcoll是定义的特征常数,论文中为3m,表示距离小于等于3米,即视为发生碰撞。
ϕ phi ϕwall:与墙壁碰撞的概率参数
平均速度指标
3.2.1 适应度函数为
本文中使用了单适应度函数,包含不同的评估标准。定义了全局适应度函数
-
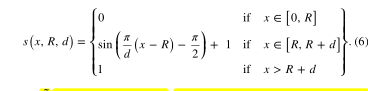
三种转化函数:(让F的取值位于0到1之间)
-
-
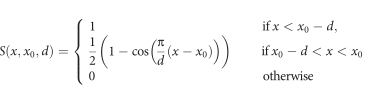
让x从x0-d平滑正弦衰减到x0
-
-
-
单适应度函数如下:
该单适应度函数考虑了所有让集群行为安全的因素。
vtol, atol,rtol的取值决定了这些不同的适应度子函数在整体适应度函数中的权重。
4 CMA-ES
设定适应度函数F,上面的11维参数作为F的未知参数,优化目标,使得F取得接近1的极大值时11维参数的输出结果。
例子:
三维函数 f=sum(x.^2); 运行求极小值。如图所示结果:
当x取(0, 0, 0)时,f取得最小值,优化目标让x取值为该坐标,并输出(0, 0, 0)。
github上的开源代码
Github链接
最后
以上就是寂寞皮卡丘最近收集整理的关于无人机集群复现算法模型对比无人机集群复现算法模型对比1 参数2 模型3 评估指标4 CMA-ES的全部内容,更多相关无人机集群复现算法模型对比无人机集群复现算法模型对比1内容请搜索靠谱客的其他文章。








发表评论 取消回复