作者:卓晴博士,清华大学自动化系
更新时间:2020-10-31 Saturday
➤ 01数据采集
数据采集,并进行FLASH存储在很多应用中都非常有用:
- 测试电池的放电过程;
- 采集环境缓变的数据;
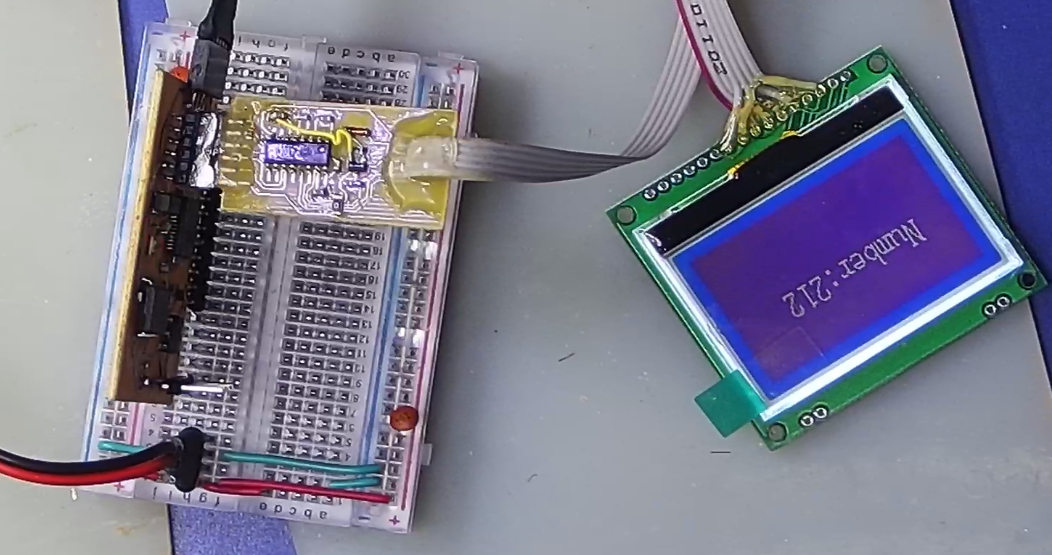
在 创界uVision下的ADuC845的工程文件 , 液晶12864COG 液晶模块串口/并口ST7565R带背3.3v 12864-14显示屏 测试了具有24bit-ADC的MCU,基于该款MCU,外加 M25P64 64MBit串口Flash存储器,可以形成数据采集和存储模块。
➤ 02模块设计
1.电路板设计1
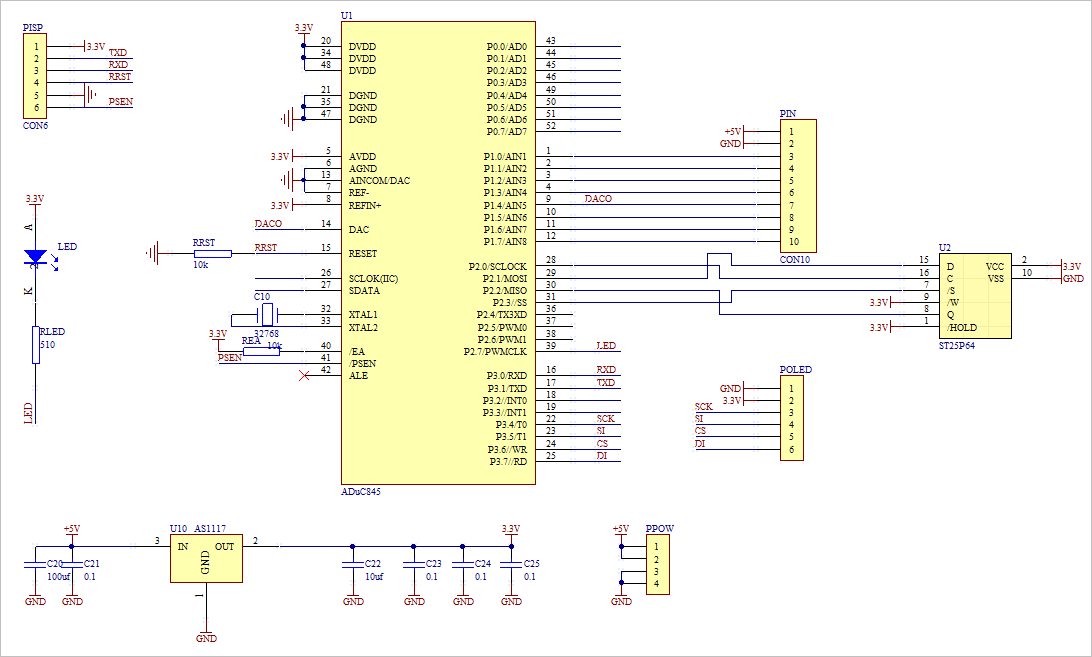
▲ 数据采集存储板
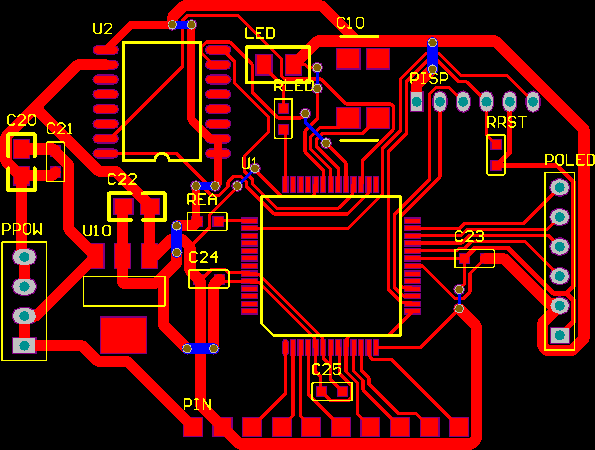
▲ 快速制版PCB
2.软件设计2
▲ 数据采集板上的下载程序
对于M25P64的读写协议是从M25P80改装回来。
对于M25P80的相关历程在之前的FreescaleMC9S12E256SanMingSCCE256-SmartCar改装过来。
/*
**==============================================================================
** M25P64.H: -- by Dr. ZhuoQing, 2020-10-31
**
** Description:
**
**==============================================================================
*/
#ifndef __M25P64__
#define __M25P64__
//------------------------------------------------------------------------------
#ifdef M25P64_GLOBALS
#define M25P64_EXT
#else
#define M25P64_EXT extern
#endif // M25P64_GLOBALS
//------------------------------------------------------------------------------
//==============================================================================
sbit M25P64_CS = P2^3;
//------------------------------------------------------------------------------
void M25P64Init(void);
//==============================================================================
// PORTABLE MACRODEFINTION
//------------------------------------------------------------------------------
// Configration SPI port in Device initialize function:
// BAUD : < 20Mhz
// MODE : 0,3 : Input sample is sample on rising edge of clock. The data
// is output on the falling edge of clk.
// BYTE : Significant bit is transfer out first.
//------------------------------------------------------------------------------
#define M25P64_CS_ON M25P64_CS = 1
#define M25P64_CS_OFF M25P64_CS = 0
#define M25P64_HOLD_ON
#define M25P64_HOLD_OFF
#define M25P64_WP_ON
#define M25P64_WP_OFF
void M25P64Nop(unsigned int nCount);
#define M25P64_DELAY_MS M25P64Nop(446)
void M25P64DelayMS(unsigned int nms);
#define M25P64_SECTOR_LENGTH 0x10000
#define M25P64_SECTOR_NUMBER 0x128
#define M25P64_PAGE_LENGTH 0x100
#define M25P64_PAGE_NUMBER 0x8000
//==============================================================================
// COMMAND MACRO DEFINITION
//------------------------------------------------------------------------------
#define M25P64_WREN 0x06 // Write Enable
#define M25P64_WRDI 0x04 // Write Disable
#define M25P64_RDSR 0x05 // Read Status Register
#define M25P64_WRSR 0x01 // Write Status Register
#define M25P64_READ 0x03 // Read Data Bytes
#define M25P64_FAST_READ 0x0b // Read Data Bytes at Higer Speed
#define M25P64_PP 0x02 // Page Program
#define M25P64_SE 0xd8 // Sector Erase
#define M25P64_BE 0xc7 // Bulk Erase
#define M25P64_DP 0xb9 // Deep Power-down
#define M25P64_RES 0xab // Release from Deep Power-down
#define M25P64_RDID 0x9f // Read Identification
//------------------------------------------------------------------------------
#define M25P64_STATUS_SRWD 0x80 // Status register Write Protect
#define M25P64_STATUS_BP2 0x10 // Block Protect Bits
#define M25P64_STATUS_BP1 0x08 //
#define M25P64_STATUS_BP0 0x04 //
#define M25P64_STATUS_WEL 0x02 // Write Enable Latch
#define M25P64_STATUS_WIP 0x01 // Write in Progress Bit
//------------------------------------------------------------------------------
// SUBFUNCTIONS
void M25P64WriteEnable(void);
void M25P64WriteDisable(void);
void M25P64WriteStatus(unsigned char ucStatus);
unsigned char M25P64ReadStatus(void);
#define M25P64_POLL_WAIT 0xfffffffe
unsigned long M25P64WaitPoll(void);
void M25P64ReadBytes(unsigned long lnAddress, unsigned char * pBuffer, unsigned int nLength);
unsigned char M25P64ReadByte(unsigned long lnAddress);
void M25P64ReadBytesFast(unsigned long lnAddress, unsigned char * pBuffer, unsigned int nLength);
void M25P64ProgramPage(unsigned long lnAddress, unsigned char * pBuffer, unsigned char ucLength);
void M25P64EraseSector(unsigned long lnAddress);
void M25P64EraseBulk(void);
void M25P64DeepPowerdown(void);
unsigned char M25P64Reset(void);
unsigned long M25P64ReadSignatureID(void);
#define M25P64_SIGN 0x202017 // M25P64 signature is 0x16
//==============================================================================
// END OF THE FILE : M25P64.H
//------------------------------------------------------------------------------
#endif // __M25P64__
/*
**==============================================================================
** M25P64.C: -- by Dr. ZhuoQing, 2020-10-31
**
**==============================================================================
*/
#include <ADUC845.h>
#include <stdio.h>
#include <intrins.h>
#include "uc845.h"
//------------------------------------------------------------------------------
#define M25P64_GLOBALS 1 // Define the global variables
#include "M25P64.H"
//------------------------------------------------------------------------------
void M25P64Nop(unsigned int nTime) {
while(nTime --) {
_nop_();
}
}
void M25P64DelayMS(unsigned int nms) {
unsigned int i;
for(i = 0; i < nms; i ++)
M25P64_DELAY_MS;
}
void M25P64Init(void) {
M25P64_CS_ON;
M25P64_HOLD_ON;
M25P64_WP_ON;
M25P64WriteStatus(0x00); // Disable BPL0,1,2
}
//------------------------------------------------------------------------------
// SUBFUNCTIONS
void M25P64WriteEnable(void) {
M25P64_CS_OFF;
SPISendReceive(M25P64_WREN);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64WriteDisable(void) {
M25P64_CS_OFF;
SPISendReceive(M25P64_WRDI);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64WriteStatus(unsigned char ucStatus) {
M25P64_CS_OFF;
SPISendReceive(M25P64_WRSR);
SPISendReceive(ucStatus);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
unsigned char M25P64ReadStatus(void) {
unsigned char ucReturn;
M25P64_CS_OFF;
SPISendReceive(M25P64_RDSR);
ucReturn = SPISendReceive(0x0);
M25P64_CS_ON;
return ucReturn;
}
//------------------------------------------------------------------------------
unsigned long M25P64WaitPoll(void) {
unsigned long i;
unsigned char ucStatus;
for(i = 0; i < M25P64_POLL_WAIT; i ++) {
ucStatus = M25P64ReadStatus();
if((ucStatus & M25P64_STATUS_WIP) == 0) return i;
}
return i;
}
//------------------------------------------------------------------------------
void M25P64ReadBytes(unsigned long lnAddress, unsigned char * pBuffer, unsigned int nLength) {
unsigned int i;
unsigned char ucData;
M25P64_CS_OFF;
SPISendReceive(M25P64_READ);
ucData = (unsigned char)(lnAddress >> 16);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress >> 8);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress);
SPISendReceive(ucData);
for(i = 0; i < nLength; i ++) *(pBuffer ++) = SPISendReceive(0x0);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
unsigned char M25P64ReadByte(unsigned long lnAddress) {
unsigned char ucByte;
unsigned char ucData;
M25P64_CS_OFF;
SPISendReceive(M25P64_READ);
ucData = (unsigned char)(lnAddress >> 16);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress >> 8);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress);
SPISendReceive(ucData);
ucByte = SPISendReceive(0x0);
M25P64_CS_ON;
return ucByte;
}
//------------------------------------------------------------------------------
void M25P64ReadBytesFast(unsigned long lnAddress, unsigned char * pBuffer, unsigned int nLength) {
unsigned int i;
unsigned char ucData;
M25P64_CS_OFF;
SPISendReceive(M25P64_FAST_READ);
ucData = (unsigned char)(lnAddress >> 16);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress >> 8);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress);
SPISendReceive(ucData);
SPISendReceive(0x0);
for(i = 0; i < nLength; i ++) *(pBuffer ++) = SPISendReceive(0x0);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64ProgramPage(unsigned long lnAddress, unsigned char * pBuffer, unsigned char ucLength) {
unsigned char ucData;
M25P64WriteEnable();
M25P64_CS_OFF;
SPISendReceive(M25P64_PP);
ucData = (unsigned char)(lnAddress >> 16);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress >> 8);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress);
SPISendReceive(ucData);
do {
SPISendReceive(*(pBuffer ++));
} while(--ucLength);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64EraseSector(unsigned long lnAddress) {
unsigned char ucData;
M25P64WriteEnable();
M25P64_CS_OFF;
SPISendReceive(M25P64_SE);
ucData = (unsigned char)(lnAddress >> 16);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress >> 8);
SPISendReceive(ucData);
ucData = (unsigned char)(lnAddress);
SPISendReceive(ucData);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64EraseBulk(void) {
M25P64WriteEnable();
M25P64_CS_OFF;
SPISendReceive(M25P64_BE);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
void M25P64DeepPowerdown(void) {
M25P64_CS_OFF;
SPISendReceive(M25P64_DP);
M25P64_CS_ON;
}
//------------------------------------------------------------------------------
unsigned char M25P64Reset(void) {
unsigned char ucReturn;
M25P64_CS_OFF;
SPISendReceive(M25P64_RES);
SPISendReceive(0x0);
SPISendReceive(0x0);
SPISendReceive(0x0);
ucReturn = SPISendReceive(0x0);
M25P64_CS_ON;
return ucReturn;
}
//------------------------------------------------------------------------------
unsigned long M25P64ReadSignatureID(void) {
unsigned char ucReturn;
unsigned long lnNumber;
M25P64_CS_OFF;
SPISendReceive(M25P64_RDID);
ucReturn = SPISendReceive(0x0);
lnNumber = ucReturn;
ucReturn = SPISendReceive(0x0);
lnNumber = (lnNumber << 8) + ucReturn;
ucReturn = SPISendReceive(0x0);
lnNumber = (lnNumber << 8) + ucReturn;
M25P64_CS_ON;
return lnNumber;
}
//==============================================================================
// END OF THE FILE : M25P64.C
//------------------------------------------------------------------------------
➤ ※ 结论
基于ADuC845设计了举办ADDC输出的采集板。配置有M25P64存储相应的采集数据。存储空间为8Mbytes.
■ 相关文献链接:
- 创界uVision下的ADuC845的工程文件
- 液晶12864COG 液晶模块串口/并口ST7565R带背3.3v 12864-14显示屏
- M25P64
基于ADuC845的数据采集工程文件:ADTest2020ADuC84525P64ADuC84525P64.SchDoc ↩︎
数据采集C51工程文件:C51ADuC845Test2020TestLCDTestLCD.uvproj ↩︎
最后
以上就是大气咖啡豆最近收集整理的关于基于ADuC845的数据采集板➤ 01数据采集➤ 02模块设计➤ ※ 结论的全部内容,更多相关基于ADuC845的数据采集板➤内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复