联系方式:860122112@qq.com
人机交互技术是通过识别人体包括手势、体势、表情等动作,甚至采用语音和生物电信号实现人与计算机的多通道融合的交互技术。Kinect作为一个划时代的产品,通过获取彩色图像、深度图像以及人体骨骼图像提供一项全新的人机交互的方式,使人机互动的理念更加彻底的展现出来。它能够捕捉、跟踪以及解密人体的动作、手势以及声音。另一方面,随着智能机器人的发展,移动式机器人逐渐成为一个主要的研究热点。本文通过利用Kinect体感设备进行姿态识别、动态手势识别和人脸跟踪,实现通过多种人体姿势进行无接触式交互对智能巡逻车进行控制,同时利用摄像头和无线网络让智能巡逻车具有视频监控功能。
研究的内容有:
- 采用Kinect的骨骼跟踪技术获取人体的各个关节点,利用角度测量的方法和欧式距离法测量出关节点之间的角度与距离,以此作为人工神经网络的输入;
- 通过人工神经网络与有限状态机相结合进行动态手势识别,以此控制智能巡逻车的加减档;
- 采用模糊控制算法对智能巡逻车的速度进行控制;
- 利用Kinect的人脸跟踪技术控制智能巡逻车摄像头云台,使云台可以上下左右转动,以实现更大的监控范围。
技术路线
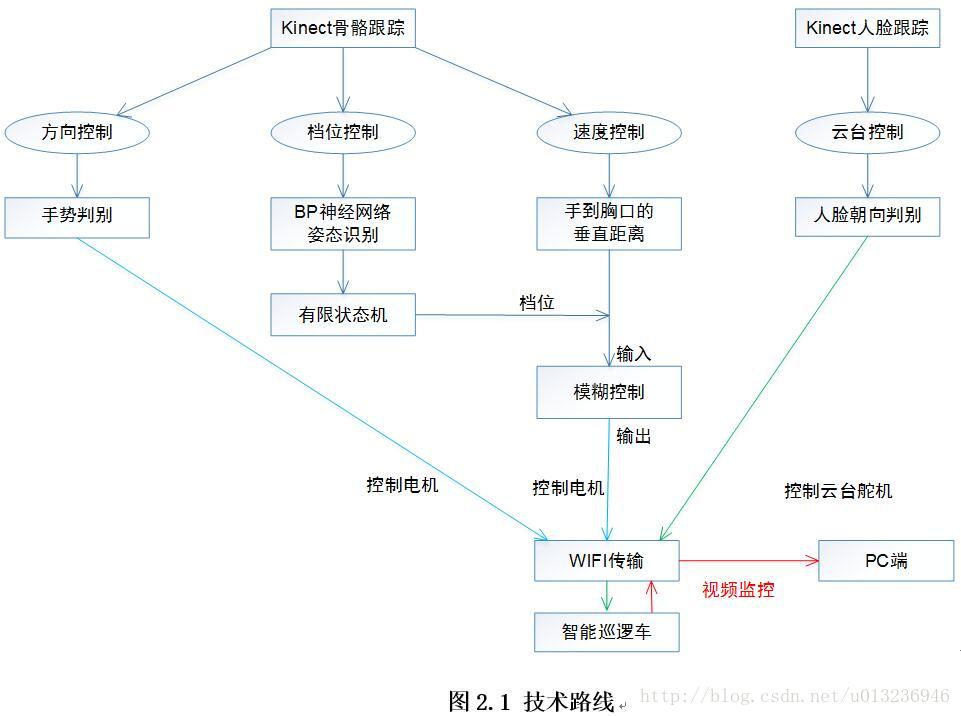
图2.1所示的技术路线是本文研究设计的核心,包括(1)基于Kinect骨骼跟踪的方向控制,(2)档位控制,(3)速度控制,以及(4)基于Kinect人脸跟踪的摄像机云台控制。其中方向控制利用了左右手骨骼点之间的角度与距离;档位控制利用了BP神经网络和有限状态机;速度控制利用了模糊控制。以上这三种控制都是通过无线网络对智能巡逻车的驱动车轮运动的电机进行控制。而云台控制则是利用人脸在三维坐标系中的偏转角度通过无线网络控制云台的两部舵机。最后摄像机的视频监控通过无线网络传回PC端。
通过模糊控制对智能巡逻车的速度进行控制
模糊系统输入输出变量:
输入:档位(g)、左手到胸口垂直距离的标准化(h)
输出:速度(s)智能巡逻车摄像机云台具主轴、副轴双舵机,分别负责水平、垂直方向的转动,居中时每个方向的最大转动角度是90°,为了使得视频监控方向控制最大人性化,本文将通过Kinect人脸跟踪技术对这两个舵机进行操作。
总结主要控制的设计
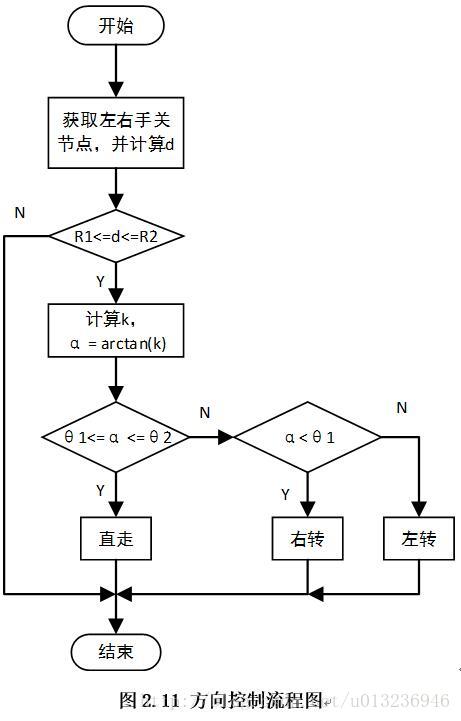
(1) 方向控制:通过左右手关节点的信息结算左右手的欧式距离,判断是否符合虚拟方向盘的半径范围,再由左右手连线在X、Y坐标系中的斜率大小进行方向判定;
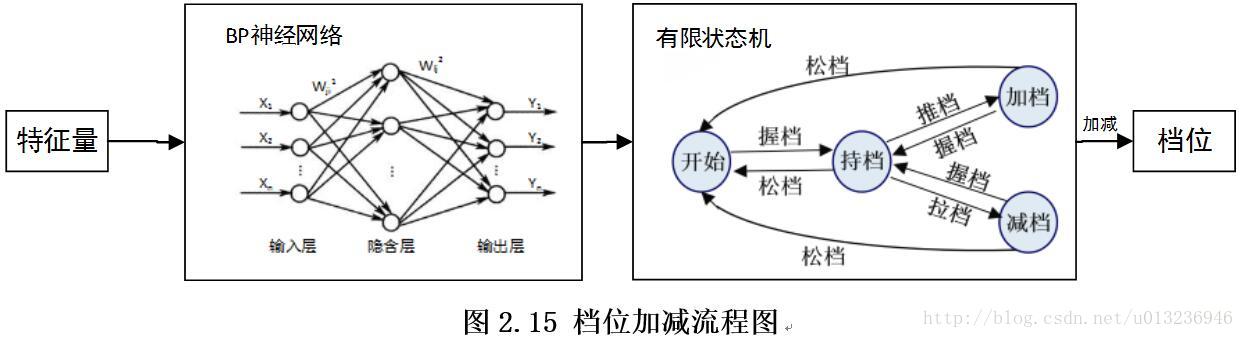
(2) 档位控制:首先通过BP神经网络识别右手的静态姿势,把结果送到有限状态机,通过状态转移可以识别出右手在某一时段的动作,从而进行加减档控制;
(3) 速度控制:通过档位、左手信息模糊控制智能巡逻车的速度,并直接制作出模糊控制表;
(4) 云台控制:通过Kinect人脸跟踪技术中人脸在坐标系中的偏转实现人脸对云台上下、左右的控制。
实验效果
height="500" width="800" src="http://player.youku.com/embed/XMjc3OTc2MjU4NA==">
最后
以上就是真实长颈鹿最近收集整理的关于基于人机交互的智能巡逻车实时控制方式的研究及实现的全部内容,更多相关基于人机交互内容请搜索靠谱客的其他文章。








发表评论 取消回复