文章目录
- 功能
- 端口
- 输入端
- 1. Time
- 2. Wapints
- 3. Number of parameters
- 4. Parameter 1/2
- 5. PeakVelocity
- 6. Accleration
- 7. EndTime
- 8. Acceleration Time
- 9. Simulate using
- 输出端
- 1. q
- 2. qd
- 3. qdd
- 示例
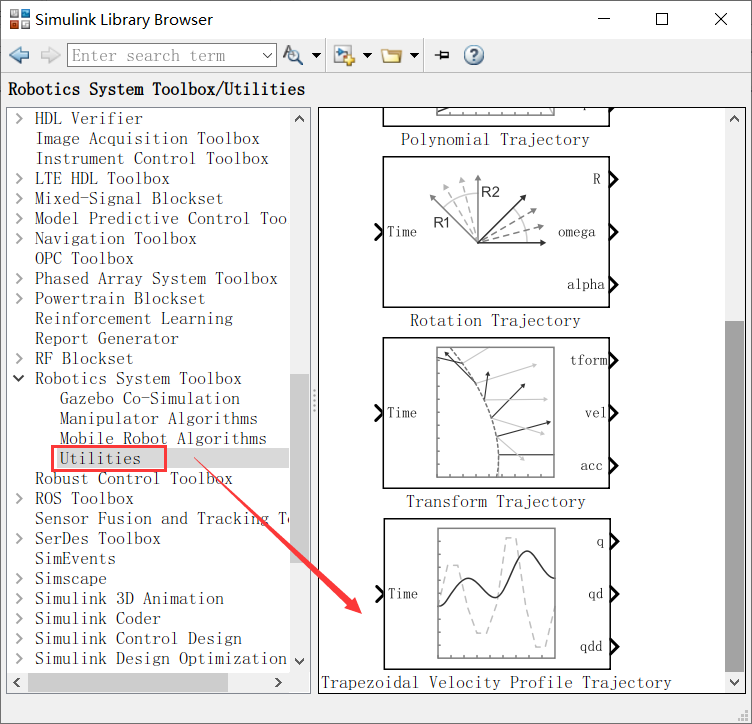
功能
给定始末位置和时间信息,规划出轨迹的位置、速度和加速度
端口
输入端
1. Time
沿轨迹的时间点,指定为标量或向量。通常,当指定为标量时,该值将与仿真时间同步,并用于指定采样轨迹的时间点。该块在该时刻输出轨迹变量的向量。如果将时间指定为向量,则该块将输出一个矩阵,其中每个列对应于向量的每个元素。
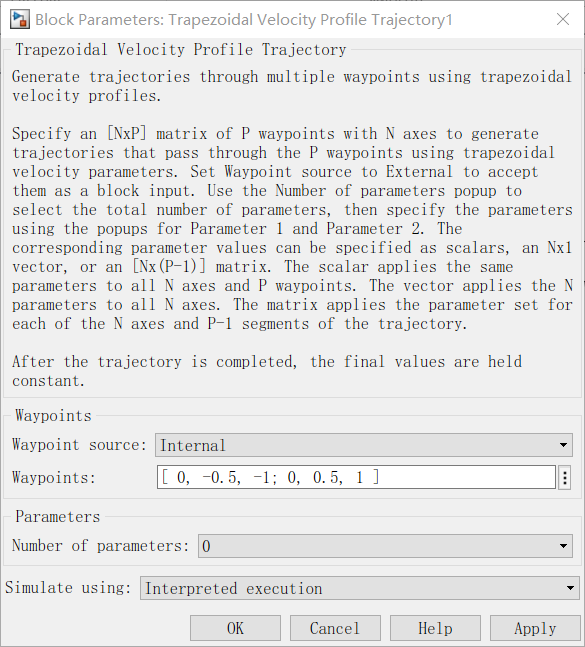
2. Wapints
给定轨迹航路点位置,指定为nxp矩阵,其中n是轨迹维数,p是轨迹点数
默认:[ 0, -0.5, -1; 0, 0.5, 1 ] %即2维轨迹,轨迹有三个关键点,关键点个数至少两个
如果需要外界输入,应将Waypoint source设置为External,此时模块接口会多出一个来: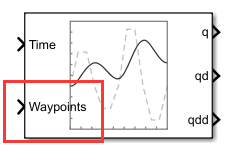
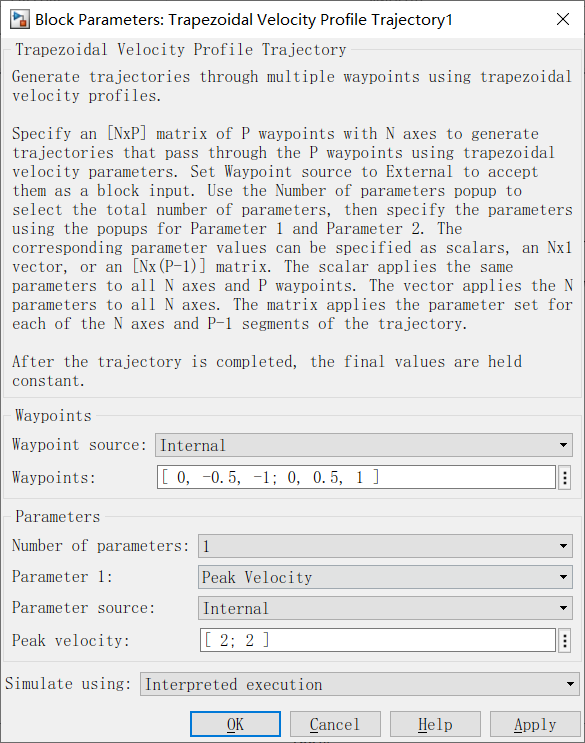
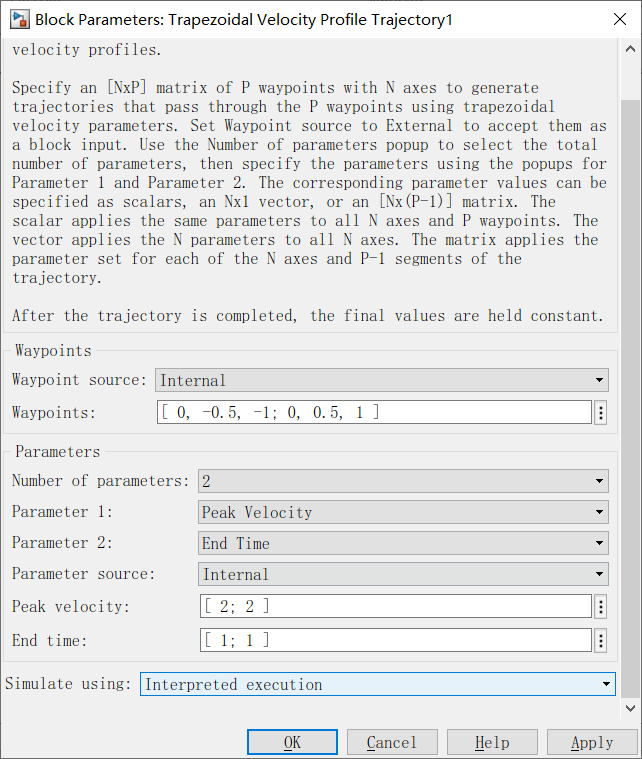
3. Number of parameters
0(默认)| 1 | 2
选1会增加一个参数:【Parameter 1】,选2会增加两个参数:【Parameter 1】、【Parameter 2】
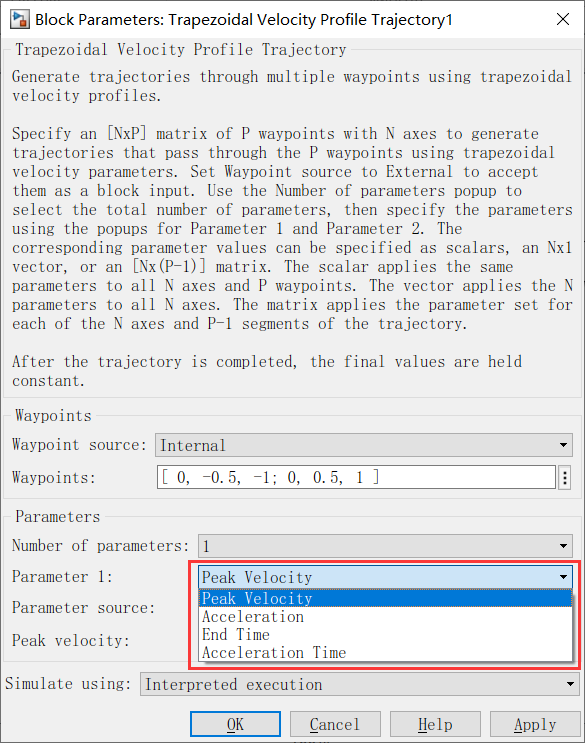
4. Parameter 1/2
速度曲线参数,指定为Peak Velocity, Accleration,End Time,或Acceleration Time。设置此参数会在掩码中创建一个以该值作为名称的参数。
要启用此参数,请将参数数量设置为 1或2。
- 如果“ 参数源”设置为Internal,则此参数将使用该值作为名称在掩码中创建一个参数;
- 如果“ 参数源”设置为External,则此参数基于此值创建输入端口;
5. PeakVelocity
[1;2](默认)| 标量| n元向量| n ×(p – 1)矩阵
速度曲线的峰值速度,指定为标量,矢量或矩阵。该峰值速度是在梯形速度曲线期间达到的最高速度。
标量值将应用于轨迹的所有元素以及所有航路点之间。将 n n n元素矢量应用于所有航路点之间的轨迹的每个元素。对于每个航路点,将 n × ( p – 1 ) n ×(p – 1) n×(p–1)矩阵应用于轨迹的每个元素。
要启用此参数,请将参数数量设置为 1或2。将参数1 或参数2设置为Peak Velocity。然后,将“ 参数源”设置 为External。
6. Accleration
[2;2](默认)| 标量| n元向量| n ×(p – 1)矩阵
速度曲线的加速度,指定为标量,向量或矩阵。此加速度定义了从零速度到PeakVelocity值的恒定加速度 。
标量值将应用于轨迹的所有元素以及所有航路点之间。将 n n n元素矢量应用于所有航路点之间的轨迹的每个元素。对于每个航路点,将 n × ( p – 1 ) n ×(p – 1) n×(p–1)矩阵应用于轨迹的每个元素。
要启用此参数,请将参数数量设置为 1或2。将参数1 或参数2设置为Acceleration。然后,将“ 参数源”设置 为External。
7. EndTime
[1;2](默认)| 标量| n元向量| n ×(p – 1)矩阵
轨迹段的持续时间,指定为标量,向量或矩阵。
标量值将应用于轨迹的所有元素以及所有航路点之间。将 n n n元素矢量应用于所有航路点之间的轨迹的每个元素。对于每个航路点,将 n × ( p – 1 ) n ×(p – 1) n×(p–1)矩阵应用于轨迹的每个元素。
要启用此参数,请将参数数量设置为 1或2。将参数1 或参数2设置为End Time。然后,将“ 参数源”设置 为External。
8. Acceleration Time
[1;1](默认)| 标量| n元向量| n ×(p – 1)矩阵
速度曲线加速阶段的持续时间,指定为标量,向量或矩阵。
标量值将应用于轨迹的所有元素以及所有航路点之间。将 n n n元素矢量应用于所有航路点之间的轨迹的每个元素。对于每个航路点,将 n × ( p – 1 ) n ×(p – 1) n×(p–1)矩阵应用于轨迹的每个元素。
要启用此参数,请将参数数量设置为 1或2。将参数1 或参数2设置为Acceleration Time。然后,将“ 参数源”设置为External。
9. Simulate using
默认:Interpreted execution

Interpreted execution-使用MATLAB仿真模型®解释。此选项可缩短启动时间,但仿真速度比慢Code generation。在这种模式下,您可以调试块的源代码。
Code generation—使用生成的C代码模拟模型。你运行一个仿真的第一次的Simulink ®产生该块的C代码。只要模型不发生变化,C代码就可用于后续仿真。此选项需要额外的启动时间,但后续仿真的速度与相当 Interpreted execution。
输出端
1. q
| 向量| 矩阵
轨迹的位置,指定为标量,向量或矩阵。如果为Time具有 n n n维轨迹的输入 指定标量,则输出为具有 n n n个元素的向量 。如果 为输入指定 m m m个元素的向量Time,则输出为 n × m n × m n×m矩阵。
2. qd
| 向量| 矩阵
轨迹的速度,指定为标量,向量或矩阵。如果为Time具有 n n n维轨迹的输入 指定标量,则输出为具有 n n n个元素的向量 。如果 为输入指定 m m m个元素的向量Time,则输出为 n × m n × m n×m矩阵。
3. qdd
| 向量| 矩阵
轨迹的加速度,指定为标量,向量或矩阵。如果为Time具有 n n n维轨迹的输入 指定标量,则输出为具有 n n n个元素的向量 。如果 为输入指定 m m m个元素的向量Time,则输出为 n × m n × m n×m矩阵。
示例
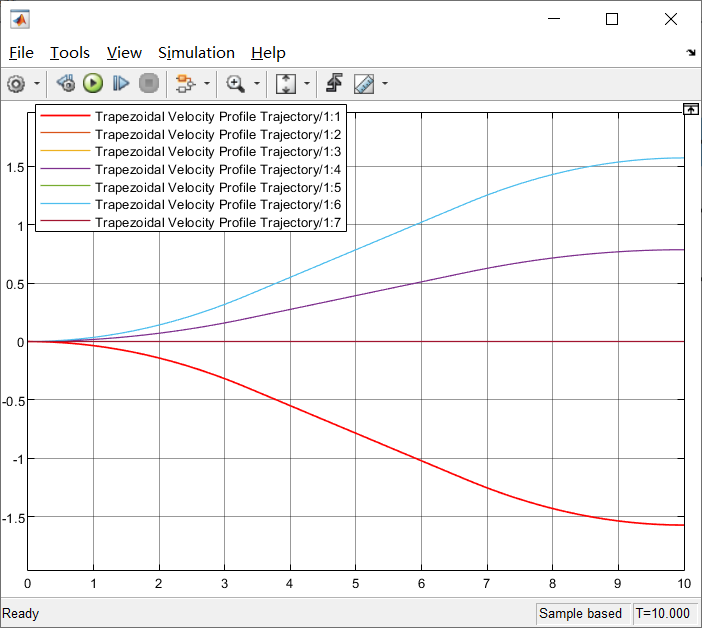
规划7轴轨迹,轴1为0到90°,轴2为0到45°,轴3为0到0°,轴4为0到45°,轴5为0到90°,轴6为0到90°,轴1为0到0°,轨迹时间为10
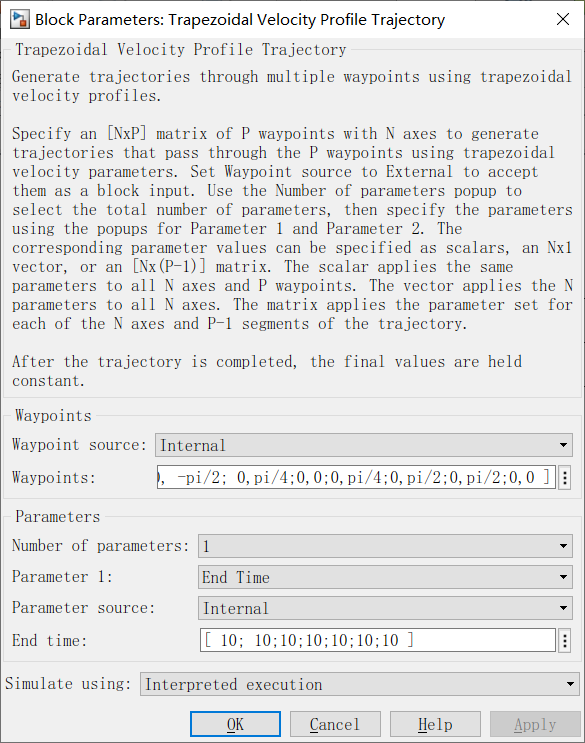
Waypoints:[ 0, -pi/2; 0,pi/4;0,0;0,pi/4;0,pi/2;0,pi/2;0,0 ]
End time:[ 10; 10;10;10;10;10;10 ]
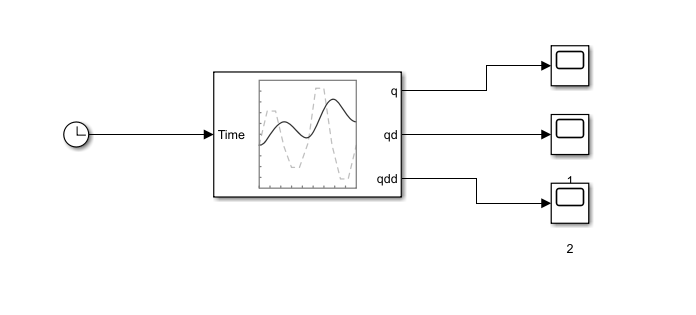
位置
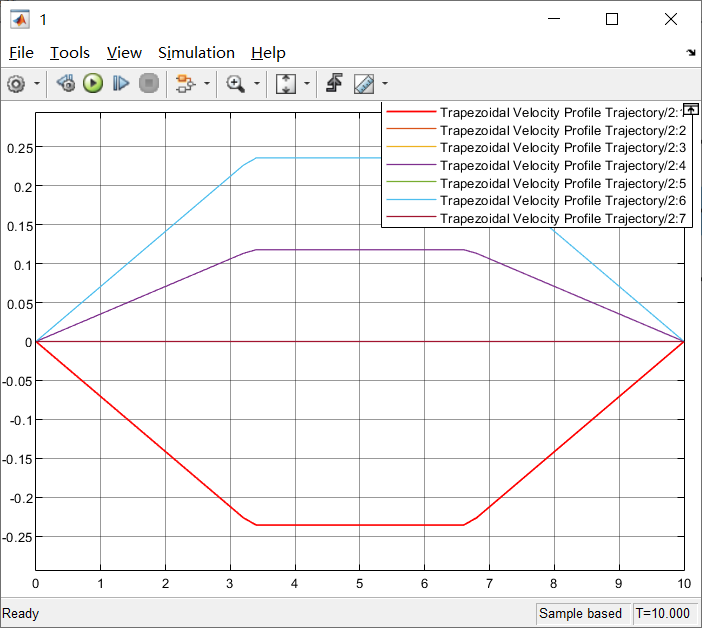
速度
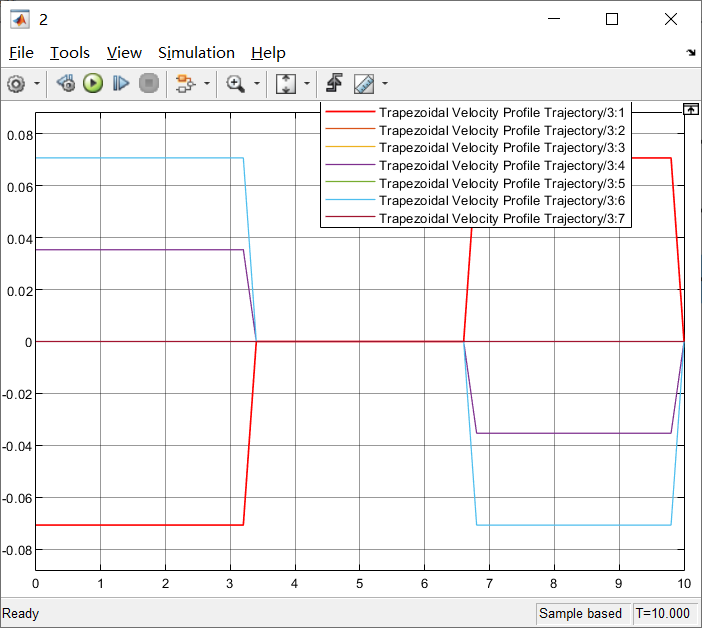
加速度
参考文献
https://ww2.mathworks.cn/help/robotics/ref/trapezoidalvelocityprofiletrajectory.html
最后
以上就是愤怒果汁最近收集整理的关于Robotics System Toolbox 使用笔记 —— 梯形速度轨迹规划模块的使用功能端口示例的全部内容,更多相关Robotics内容请搜索靠谱客的其他文章。








发表评论 取消回复