无人驾驶无疑是2017年最吸引眼球的黑科技,无论是互联网公司 Google、百度,还是特斯拉、传统的汽车厂商奔驰、沃尔沃都是扭足了劲在做这件事。近日,李彦宏乘坐公司研发的无人驾驶汽车,前往2017百度AI开发者大会,可谓赚足了媒体的眼球,使得无人驾驶成为了茶间热议的话题。
在我们谈论无人驾驶时,经常会将“无人驾驶”、“自动驾驶”以及“驾驶辅助”三个词混淆,认为三者之间是可替代的关系。其实不然,它们分别代表了不同级别的自动驾驶技术。美国汽车工程师协会将自动驾驶技术进行了分级(如下图),这是目前国际公认的术语界定。
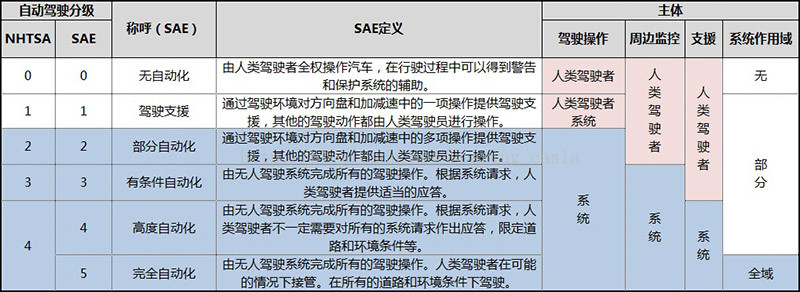
L0属于传统驾驶,L1和L2属于驾驶辅助,L3-L5属于自动驾驶,L5的自动驾驶技术等级也称为“无人驾驶”。因此,按照自动驾驶技术等级划分,驾驶辅助<自动驾驶<无人驾驶。
驾驶辅助
驾驶辅助技术当前已经在量产车上部署,通常称为高级驾驶辅助系统(Advanced Driver Assistant Systems,简称ADAS)。
ADAS是利用安装在车上的各式各样传感器,在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。初级的ADAS以被动式报警为主,当车辆检测到潜在危险时, 会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预已较为普遍。
驾驶辅助技术处于自动驾驶技术等级的L1和L2,L1阶段车辆开始介入制动与转向其中一项控制,分担驾驶员的工作,主要有自适应巡航(ACC,Adaptive Cruise Control)、车道保持功能(LKA,Lane Keep Assist)紧急制动刹车(AEB,Automatic Emergency Braking)等功能。L2阶段车辆开始接管纵向与横向的多个控制,驾驶操作由系统完成,但司机注意力仍然要保持驾车状态,以便随时接管车辆。与L1的不同在于,横向和纵向系统需要进行融合。
尽管L2与L1相比,驾驶操作的主体由人变成了系统,但负责周边监控的主体都是人。然而,恰恰负责周边监控的主体是人还是无人驾驶系统,是高级驾驶辅助系统(ADAS)向自动驾驶过渡的核心标志。
自动驾驶
自动驾驶相比于驾驶辅助,对技术和车辆性能要求更严格,主要体现在以下3个方面。
首先,需要更好的目标识别算法
刚才我们介绍到,ADAS主要作用在于被动式报警,它有一个很重要的衡量指标,那就是“误报率”,“误报率”如果高,大家就把这么一套系统关掉了。
“误报率”这一指标,也是衡量自动驾驶技术的重要考量,要不然会很麻烦,也不安全,比如自动驾驶里面有一个AEB(自主紧急制动),如果老是误刹,会对车辆的安全造成威胁。另外,相对于误报率,漏报率可能并不是驾驶辅助(ADAS)中最重要的一个指标,但当系统从“驾驶辅助”变成“自动驾驶”之后,漏报率必须要降低为零。因为出现一起漏报,可能就会车毁人亡。所以这些都需要有更好的目标识别算法和多传感器的融合。
其次,规划和控制
在自动驾驶中,系统不能仅仅是警告,还需要加入规划和控制。这个是从驾驶辅助到自动驾驶需要做的。
再次,视觉和雷达的融合要进一步提升
不就前,特斯拉的辅助驾驶发生了一起车祸——撞上了一辆横着的拖车。出现这种情况,就说明了视觉和雷达的重要性。首先特斯拉Autopilot用的车辆识别技术还比较原始。它基本上看本车道或者是相邻车道的车屁股。车屁股有非常明显的特征,车屁股下有阴影,有车灯,车是一个对称的几何体。这些特征使得它在夜晚也能比较清晰的识别出来。但是在这次事故中,特斯拉撞上了一辆横着的车。这个车的色彩很难跟背景区分开来。所以视觉这一块实际上是需要进一步提升的。
在这起车祸中,为什么雷达没有探测到那辆拖车呢?特斯拉方面的回应是,雷达确实探测到了这辆车,但是把它归类成为了横跨马路的道路标志。从普通的雷达算法的角度上说,它是希望在靠近的时候能够做出更准确的判断。但是很可惜,这个拖车的底盘非常高,而雷达安装的位置比较低,所以靠近的时候并没有被发现。实际上更早的时候也出现过特斯拉的雷达没有判断出前面较高底盘的车的情况。所以,雷达和视觉方面也需要提升才能更好的去做自动驾驶。
可喜的是,随着硬件和算法的发展,上述问题正在逐一得到改善。基于深度学习的目标识别算法能够大大提升目标识别的精确度,但是深度学习还不够,因为在目前基于深度学习的识别中,前车需要露出1/3才能够识别出来。既然深度学习不够用,硬件能否弥补呢?恰好,视觉雷达就能够填补它的缺点。相信深度学习和视觉雷达相结合,能够发挥更好的效果。
无人驾驶
无人驾驶技术等级处于最高级,无人驾驶=完全的自动驾驶,也就是说在无人驾驶的技术等级下,开车这活完全交给了无人驾驶系统。无人驾驶车辆中或许只有1个启动/关闭按钮,当我们每天上车,点击“启动”按钮,将目的地告诉系统,那么车子就会载着你到达你想要的目的地。至于中间行驶过程,怎么走,开多快,都是车说了算。你只需要安心在车内睡觉或者思考问题。这听起来是不是特别酷?
当前谷歌的无人驾驶车没有方向盘,也没有油门,就一个启动和关闭按钮,是真正意义上的无人驾驶车,虽然功能方面还有很长的路要走;百度的无人驾驶车,严格意义上来说是一辆具备高级自动驾驶功能的汽车。
在目前技术水平下,实现无人驾驶技术,还有许多工作要做,主要包括:高精度的地图定位、强大的认知算法以及软件架构的安全性保障,其中任意一个问题都是相当棘手的。按照目前的技术发展,2020年后,限定场景的无人驾驶汽车会量产,但要实现全天候全区域的无人驾驶,起码十五年以后。
以人为本的人机协同共驾
无人驾驶还不是最高级别的,最高级别叫“以人为本的人机协同共驾”,就好比骑士和马的关系,后边有人偷袭,马先觉得不对劲,一抬后踢倒对方。以后最高级别的驾驶也是如此机智,你的车就是一个人工智能机器人。打个比方,早上一出门奔你那车,快到跟前了车门自己就开了,车还能语音打招呼:主人,今儿早啊,快上来吧。你一上车,坐好了,车就开了拉你奔单位,车还得问你:您吃早点了么?要不要路上找个地方喝碗豆腐脑,你说,行啊!找一个好评比较多的。那车就帮你搜索,搜出一个五星好评的早点摊儿,就直接奔那儿了。希望我们暮年时,能够想享受到无人驾驶带来的豪华体验。
从驾驶辅助到自动驾驶,面临第一次跃迁;从自动驾驶到无人驾驶,是第二次跃迁。自动驾驶不仅仅是算法,它是一套超级复杂的系统工程,要考虑可靠性、安全性。不过,自动驾驶在相当长的一段时间里面,还是统计上比较可靠,还可能会犯低级错误的技术,需要业界和学术界的合作,政府和媒体的支持和宽容,使得它的技术在未来3-5年真正能实用。
最后
以上就是调皮冥王星最近收集整理的关于无人驾驶、自动驾驶与驾驶辅助的区别的全部内容,更多相关无人驾驶、自动驾驶与驾驶辅助内容请搜索靠谱客的其他文章。








发表评论 取消回复