ROS2_Foxy学习10——多机激光SLAM准备篇
- 1 安装Ubuntu20.04 mate
- 2 安装ROS noetic
- 3 安装cartographer
- 4 详细配置cartographer
- 5 安装RPLidar A1
- 6 测试建图
- 6.1 配置cartographer
- 6.2 配置RPLidar A1
- 6.3 运行测试
- 7 安装ROS foxy
- 8 安装ros1_bridge
- 8.1 安装
- 8.2 使用与测试
- 9 镜像备份与恢复
为了实现多机激光SLAM,在上一篇文章《ROS2_Foxy学习9——多机激光SLAM先导篇》中讨论了开源激光SLAM(Cartographer)在ROS2.0中运行的可行性。最后得出的小结是各开源激光SLAM算法对ROS2.0的适配还在进行中(2021年初),暂无法在ROS2.0上运行,因此决定曲线救国,在ROS1.0上跑SLAM,然后通过ros1_bridge这个功能包将产生的地图、车辆位姿、点云等信息上传到DDS,然后由PC端的ROS2程序处理(地图合并等工作)。基于上述情况,在车载的树莓派上安装了两个ROS(16G的SD卡是搞不定的,最少32G)。
odk,下面介绍在树莓派上部署Ubuntu 20.04mate、ROS noetic、ROS foxy、cartographer、rplidar等的过程,由于内容较多,有些部分会直接给出之前写过的一些博文而不再重复记录。
下一篇博文将介绍地图融合相关的内容。
1 安装Ubuntu20.04 mate
参考:树莓派4B——Ubuntu20.04 mate
包括:系统ubuntu20.04 mate,wiringpi库,网络与串口工具,远程,开机启动等。
2 安装ROS noetic
官方教程
-
配置仓库,即勾选"restricted," “universe,” and “multiverse.”

-
Setup your sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- Set up your keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- Installation
sudo apt update
sudo apt install ros-noetic-desktop
有不同的桌面版本,基于树莓派选择 ros-noetic-desktop
3 安装cartographer
官方教程
- 安装依赖
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
- 下载源码:创建一个ros工作空间,然后下载源码
mkdir catkin_ws
cd catkin_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
关于github解析错误的问题,raw.githubusercontent.com 拒绝连接
到https://www.ipaddress.com查一下raw.githubusercontent.com的ipv4地址
修改 /etc/hosts文件 加上下面这句命令
ipv4地址 raw.githubusercontent.com
- 安装cartographer_ros依赖
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
The command ‘sudo rosdep init’ will print an error if you have already executed it since installing ROS. This error can be ignored.
解决ROS系统 rosdep update超时问题的新方法
- 安装abseil-cpp library
src/cartographer/scripts/install_abseil.sh
# Due to conflicting versions you might need to uninstall the ROS abseil-cpp using
sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
git clone 出现fatal: unable to access 'https://github 类错误解决方法
- 编译
catkin_make_isolated --install --use-ninja
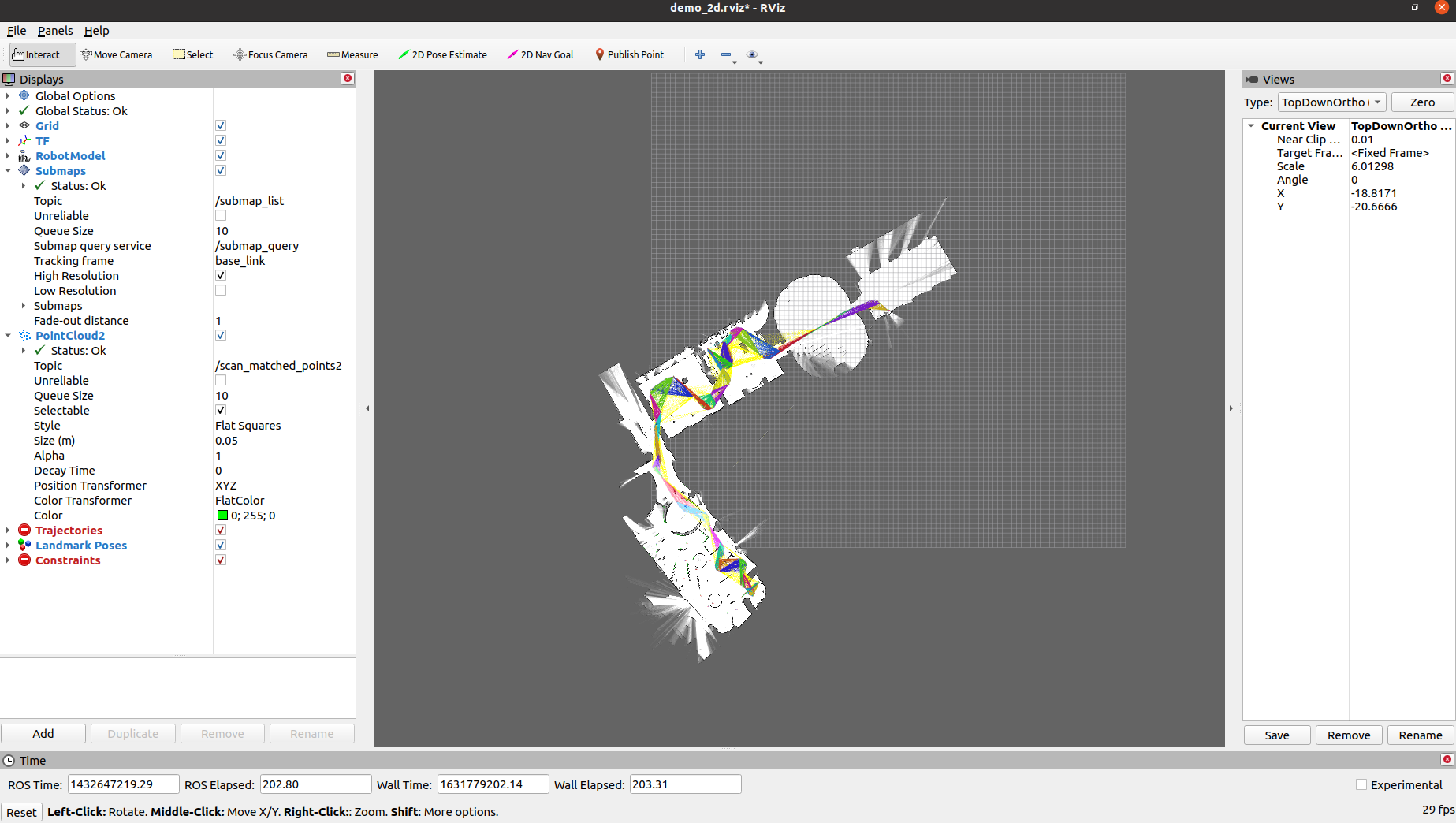
- 测试
# 下载bag
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
# 跑
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
- 问题
安装cartographer,找不到 “absl” 解决方法
4 详细配置cartographer
- 配置文件
# local slam部分 2D配置文件
cartographer/configuration_files/trajectory_builder_2d.lua
# global slam部分 配置文件
cartographer/configuration_files/pose_graph.lua
- 输入配置
所属文件:cartographer/configuration_files/trajectory_builder_2d.lua
统一: 距离单位是米,时间单位是秒
--输入配置
use_imu_data = true, --imu使用与否
min_range = 0., --过滤 水平距离范围 下限
max_range = 30., --过滤 水平距离范围 上限
min_z = -0.8,
max_z = 2.,
missing_data_ray_length = 5., --对于超过最大范围的点,用missing_data_ray_length代替
num_accumulated_range_data = 1, --数据源数量
voxel_filter_size = 0.025, --体素网格化下采样 体素大小 解决点云近密远稀的问题
--【实时】 【越大 计算量越小 丢失点越多】
adaptive_voxel_filter = { --体素网格化下采样 自适应
max_length = 0.5, --采样时间间隔
min_num_points = 200, --
max_range = 50.,
},
loop_closure_adaptive_voxel_filter = { --体素网格化下采样 回环自适应
max_length = 0.9,
min_num_points = 100,
max_range = 50.,
},
- Local SLAM配置
所属文件:cartographer/configuration_files/trajectory_builder_2d.lua(已删除TSDF部分)
Local SLAM 通过位姿推断器(pose extrapolator)来给予每一帧激光匹配的初始位姿,将每一帧激光与当前子图进行扫描匹配,匹配后将激光插入子图。
扫描匹配有2种方式:
- CeresScanMatcher匹配
使用ceres优化库构建优化方程来进行匹配,这种匹配适用于提供良好位姿初始值的情况,可以实现亚像素的匹配,速度快,缺点是如果初始值不理想,匹配也有可能不理想。- RealTimeCorrelativeScanMatcher匹配(CSM匹配)
当你没有其他数据或者不信任其他数据时,它使用了一种与回环检测相似的匹配策略,并把匹配的结果作为CeresScanMatcher匹配的初始值,这种匹配的代价较高它会淹没掉其他传感器的作用,但是它在特征丰富的环境比较鲁棒,缺点计算量增加。
关于子图
- 一个子图内激光帧数是人为设定的,当一个子图接收到给定数量的激光数据后,子图被认为是完整的。
- 一个子图内激光的数量不能太大,太大可能会产生位姿漂移(子图内部漂移要低于分辨率,即局部正确),也不能太小,太小不利于后台的回环检测。
- 一般不把所有匹配的激光都插入子图,否则会造成冗余。
- 占据概率,根据传感器配置
--Local SLAM配置
--【实】没有imu,可能需要打开这个,同时前端会比较消耗资源,原因见上
use_online_correlative_scan_matching = false,
real_time_correlative_scan_matcher = {
linear_search_window = 0.1, --最大搜索距离
angular_search_window = math.rad(20.), --最大搜索角度
translation_delta_cost_weight = 1e-1, --平移权值
rotation_delta_cost_weight = 1e-1, --旋转权值,如果机器人不常旋转,则改权值可以适当提高
},
--【实】对输入数据赋予权重,这个权重是对测量数据的信任度,可以被看作静态的协方差。权重越大,cartographer将越偏向这种参数规则。
ceres_scan_matcher = {
occupied_space_weight = 1.,
translation_weight = 10.,
rotation_weight = 40.,
ceres_solver_options = {
use_nonmonotonic_steps = false,
max_num_iterations = 20, --提高收敛速度 迭代次数
num_threads = 1, --提高收敛速度 线程数
},
},
--【实】减少子图冗余数据 两帧之间,当运动超过时间、距离、角度阈值后,才将扫描插入子图
motion_filter = {
max_time_seconds = 5.,
max_distance_meters = 0.2,
max_angle_radians = math.rad(1.),
},
--子图配置
submaps = {
num_range_data = 90, --一个子图内最大点云帧数
grid_options_2d = {
grid_type = "PROBABILITY_GRID", --存储格式 1种是概率图,1种是TSDF
resolution = 0.05, --【实】分辨率
},
range_data_inserter = {
range_data_inserter_type = "PROBABILITY_GRID_INSERTER_2D",
probability_grid_range_data_inserter = { --概率栅格地图
insert_free_space = true,
hit_probability = 0.55, --传感器给出hit后,可信度,正常应该大于0.5
miss_probability = 0.49, --传感器给出miss后,可信度,正常应该小于0.5
},
},
},
- Global SLAM配置
所属文件:cartographer/configuration_files/pose_graph.lua (已删除3d部分)
Global SLAM又可以被称作图优化,通过建立路径节点和子图之间的约束,然后优化这些约束
路径节点和子图是空间位姿,约束是空间位姿的旋转平移矩阵,用ceres的自动求导省去了自己求雅可比的工作。
约束分为2种:非全局约束和全局约束
- 非全局约束,是建立与自身路径节点比较近时的约束,一般是与前一个子图和当前子图之间建立,目的是保持局部路径的连贯性。
- 全局约束,是当检测到有回环,建立起的约束,一般是新生成的子图与之前的路径节点之间建立,目的是保持全局路径的连贯性。
- 为了限制约束的数量,cartographer限制一部分的路径节点建立约束,并通过一个约束采样因子sampling_ratio来控制。
- 太小的因子可能造成缺失约束和无效的回环检测,太大因子会降低全局SLAM的效率而且无法进行实时回环。
分支定界
类似于模板匹配使用图像金字塔的策略,先在低分辨率上进行搜索,然后逐渐在高分辨率上搜索。
It works on an exploration tree whose depth can be controlled.
POSE_GRAPH = {
optimize_every_n_nodes = 90, --【实】每n次插入,优化一次,n==0时,即关闭全局优化
constraint_builder = {
sampling_ratio = 0.3, --【实】约束采样因子
max_constraint_distance = 15., --
min_score = 0.55, --大于最小匹配值 则FastCorrelativeScanMatcher找到了足够好的匹配
global_localization_min_score = 0.6,
loop_closure_translation_weight = 1.1e4, --残差项1/5 全局约束
loop_closure_rotation_weight = 1e5, --残差项2/5 全局约束
log_matches = true, --约束的直方图形式的日志报告
--实时回环
fast_correlative_scan_matcher = {
linear_search_window = 7., --最大搜索距离
angular_search_window = math.rad(30.), --最大搜索角度
branch_and_bound_depth = 7, --分支定界 深度可控的搜索树 递归深度
},
--一但FastCorrelativeScanMatcher找到了足够好的匹配(大于最小匹配值),再用Ceres Scan Matcher进一步优化位姿(匹配结果)
ceres_scan_matcher = {
occupied_space_weight = 20.,
translation_weight = 10.,
rotation_weight = 1.,
ceres_solver_options = {
use_nonmonotonic_steps = true,
max_num_iterations = 10,
num_threads = 1,
},
},
},
matcher_translation_weight = 5e2, --残差项3/5 局部约束
matcher_rotation_weight = 1.6e3, --残差项4/5 局部约束
optimization_problem = { --残差项5/5 其他约束
huber_scale = 1e1, --控制错误值影响大小 Huber因子越大,错误值对整体的影响越大
acceleration_weight = 1.1e2,
rotation_weight = 1.6e4,
local_slam_pose_translation_weight = 1e5,
local_slam_pose_rotation_weight = 1e5,
odometry_translation_weight = 1e5,
odometry_rotation_weight = 1e5,
fixed_frame_pose_translation_weight = 1e1,
fixed_frame_pose_rotation_weight = 1e2,
fixed_frame_pose_use_tolerant_loss = false,
fixed_frame_pose_tolerant_loss_param_a = 1,
fixed_frame_pose_tolerant_loss_param_b = 1,
log_solver_summary = false,
use_online_imu_extrinsics_in_3d = true,
fix_z_in_3d = false,
ceres_solver_options = {
use_nonmonotonic_steps = false,
max_num_iterations = 50,
num_threads = 7,
},
},
--一旦轨迹完成,cartographer将执行新的全局优化,并且通常比以前的全局优化进行更多的迭代
--这样做是为了完善cartographer的最终结果,通常不需要实时进行,因此大量迭代通常是正确的选择
max_num_final_iterations = 200, --最大迭代次数
global_sampling_ratio = 0.003,
log_residual_histograms = true,
global_constraint_search_after_n_seconds = 10.,
-- overlapping_submaps_trimmer_2d = {
-- fresh_submaps_count = 1,
-- min_covered_area = 2,
-- min_added_submaps_count = 5,
-- },
}
5 安装RPLidar A1
参考官方文档:https://github.com/Slamtec/rplidar_ros 。
- 下载源码
git clone https://github.com/Slamtec/rplidar_ros.git
- 在工作空间内编译,配置串口,然后跑demo
# 编译
catkin_make
# 连接雷达,并赋予设备权限(根据实际情况,选择设备名称)
sudo chmod 777 /dev/ttyUSB0
# 跑个demo(记得source rplidar_ros的安装位置)
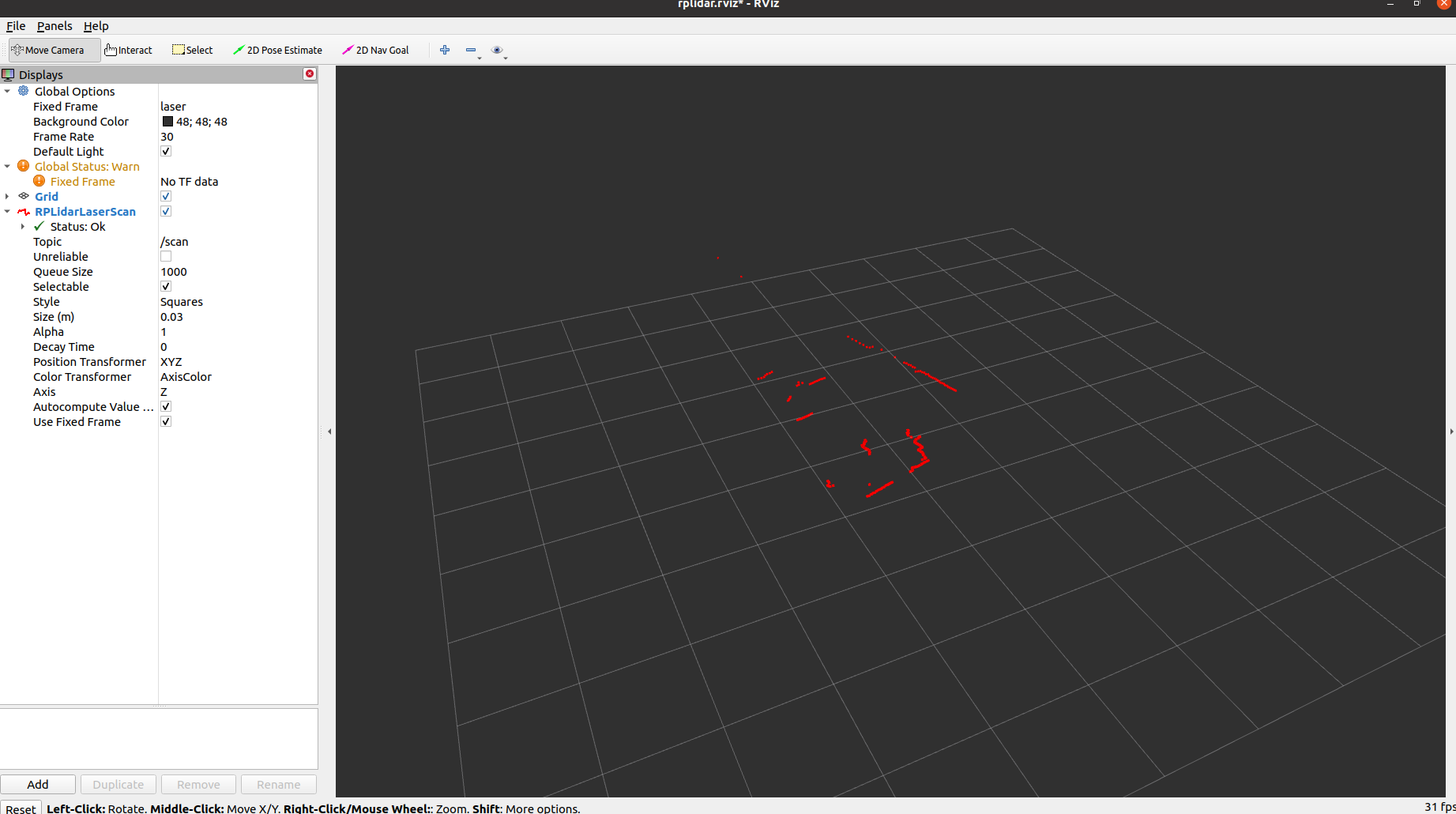
roslaunch rplidar_ros test_rplidar.launch
roslaunch rplidar_ros view_rplidar.launch
6 测试建图
新建工作空间,并把cartographer和rplidar_ros的源码包放到/src文件夹下。
6.1 配置cartographer
编写launch文件和lua配置文件,直接参考cartographer_ros包下的两个文件:
cartographer_ros/launch/demo_revo_lds.launch
cartographer_ros/configuration_files/revo_lds.lua
改动的文件内容如下,这里是重新编写了两个文件,并将这两个新文件放在了跟参考文件同一个文件夹内:
- launch文件:cartoForRplidar.launch <—— demo_revo_lds.launch
<launch>
<--!false 是因为要使用真实雷达数据,不用仿真时间 /-->
<param name="/use_sim_time" value="false" />
<--!注意configuration_basename 后面的配置文件名,要与实际的lua文件名一致 /-->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename rplidar.lua"
output="log">
<--!将后面的scan修改成机器人发布的激光topic /-->
<remap from="scan" to="scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>
- lua文件:rplidar.lua <—— revo_lds.lua
这个文件只改了tracking_frame和published_frame,这两个frame,一般是laser,需要根据雷达ros驱动的实际情况配置。
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map", --cartographer使用的全局坐标系,最好保持默认,否则ROS的Rviz不认识其它的定义,导致无法可视化建图过程
--用来发布子图,是poses的父帧,通常是“map”
--和odom最开始的时候是一个原点,但时间累计对产生累积误差
tracking_frame = "base_link", --机器人中心坐标系,由SLAM算法跟踪的坐标系
published_frame = "base_link", --这个frame是用来正在发布poses的子帧,和map_frame对应
--一般就将其设置为"base_link",这不就是"map->base_link"
odom_frame = "odom", --published_frame 和 map_frame之间的框架,用于发布(非闭环)local SLAM结果
provide_odom_frame = true, --
publish_frame_projected_to_2d = false, --是否限制为纯2d位姿
publish_tracked_pose = true, --发布tracked_pose
use_pose_extrapolator = true,
use_odometry = false, --是否订阅里程计话题,nav_msgs/Odometry
use_nav_sat = false, --是否订阅 sensor_msgs/NavSatFix
use_landmarks = false, --是否订阅 cartographer_ros_msgs/LandmarkList
num_laser_scans = 1, --订阅激光扫描话题数量,sensor_msgs/LaserScan
num_multi_echo_laser_scans = 0, --订阅多回波激光扫描话题数量,sensor_msgs/MultiEchoLaserScan
num_subdivisions_per_laser_scan = 1, --将每个接收到的(多回波)激光扫描分成的点云数
num_point_clouds = 0, --订阅点云话题数量,sensor_msgs/PointCloud2
lookup_transform_timeout_sec = 0.2, --使用tf2查找变换的超时秒数
submap_publish_period_sec = 0.3, --发布子图间隔
pose_publish_period_sec = 5e-3, --发布位姿间隔,5e-3 即 0.005s,即200Hz
trajectory_publish_period_sec = 30e-3, --发布轨迹标记时间间隔
rangefinder_sampling_ratio = 1., --range消息采样频率
odometry_sampling_ratio = 1., --odo消息采样频率
fixed_frame_pose_sampling_ratio = 1., --
imu_sampling_ratio = 1., --imu消息采样频率
landmarks_sampling_ratio = 1., --
}
MAP_BUILDER.use_trajectory_builder_2d = true --使用2D
--local slam 配置
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35 --一个子图内最大点云帧数
TRAJECTORY_BUILDER_2D.min_range = 0.3 --水平范围内过滤点云 下限
TRAJECTORY_BUILDER_2D.max_range = 30. --水平范围内过滤点云 上限
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1. --范围外的设为1米
TRAJECTORY_BUILDER_2D.use_imu_data = false --imu使用与否
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true --【实】没有imu,可能需要打开这个,同时前端会比较消耗资源,原因见上
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1 --最大搜索范围 距离
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10. --最大搜索范围 角度
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
--global slam 配置
POSE_GRAPH.optimization_problem.huber_scale = 1e2 --控制错误值影响大小 Huber因子越大,错误值对整体的影响越大
POSE_GRAPH.optimize_every_n_nodes = 35 --【实】每n次插入,优化一次,n==0时,即关闭全局优化
POSE_GRAPH.constraint_builder.min_score = 0.65 --大于最小匹配值 则FastCorrelativeScanMatcher找到了足够好的匹配
return options
- 关于lua配置的一些记录
参考https://google-cartographer-ros.readthedocs.io/en/latest/configuration.html
6.2 配置RPLidar A1
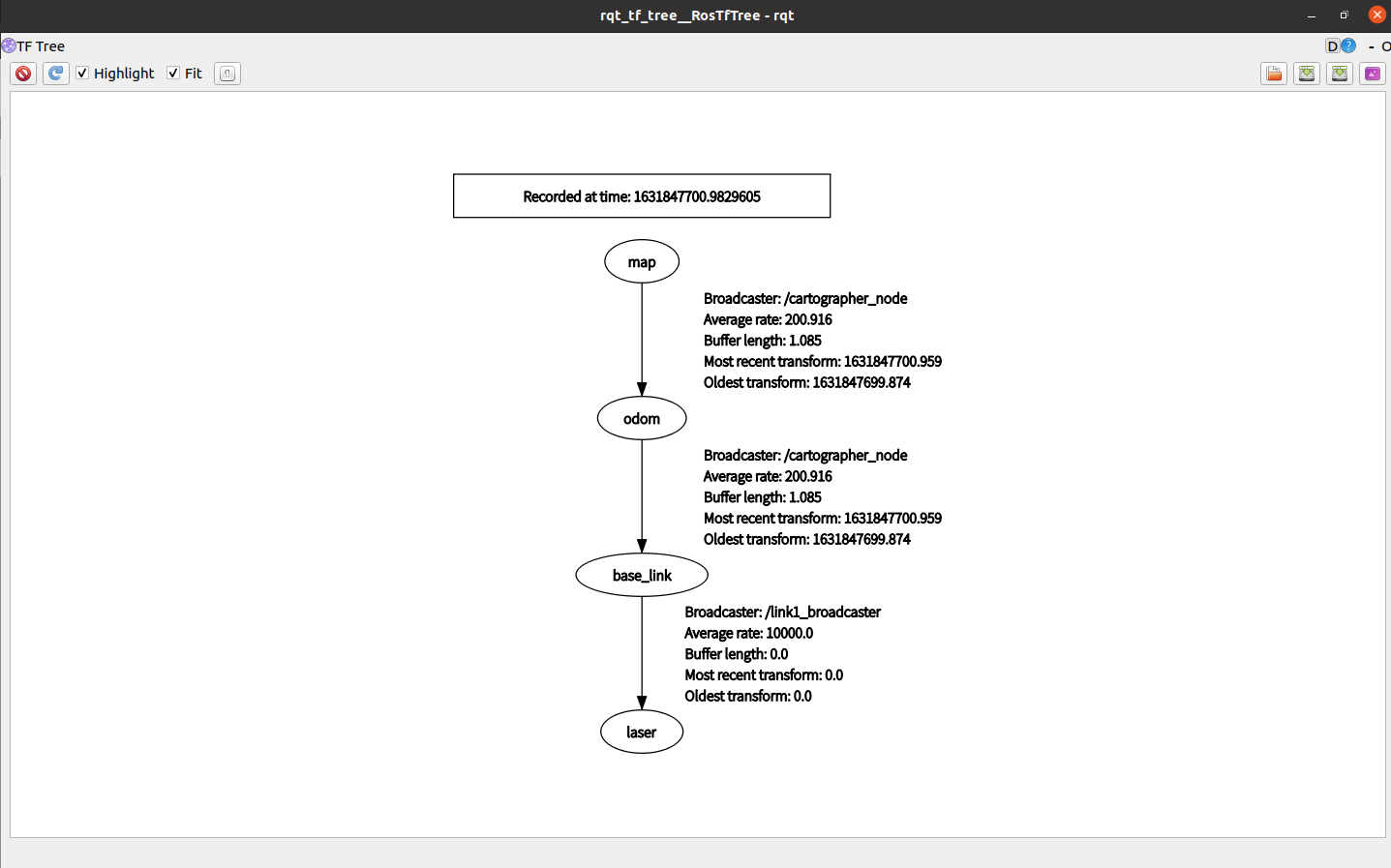
修改launch文件,添加tf转换,主要在test_rplidar上修改,如下
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="link1_broadcaster"
args="0 0 0 0 0 0 1 base_link laser" />
<node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="log">
<param name="serial_port" type="string" value="/dev/ttyUSB0"/>
<param name="serial_baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
<node name="rplidarNodeClient" pkg="rplidar_ros" type="rplidarNodeClient" output="log">
</node>
</launch>
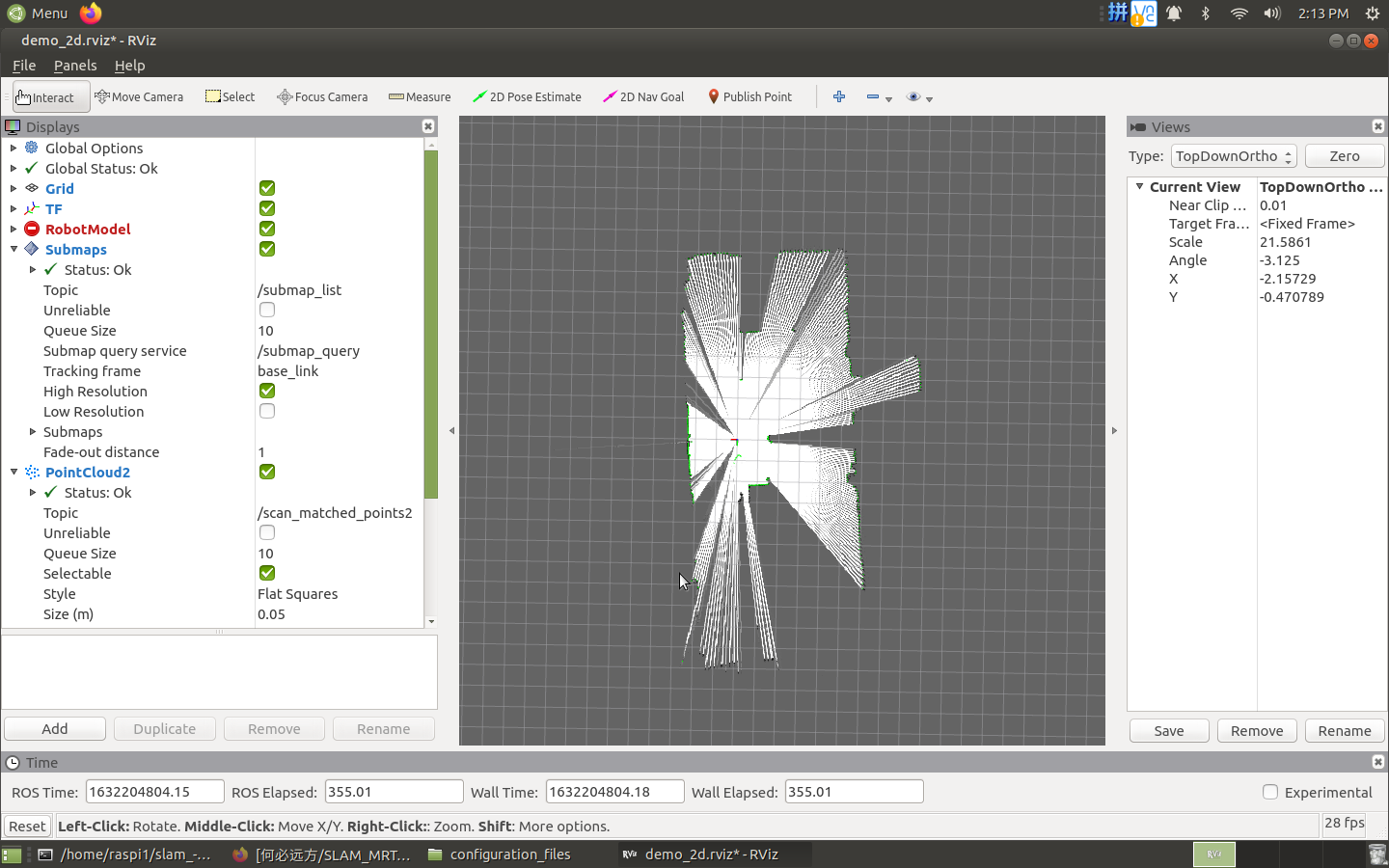
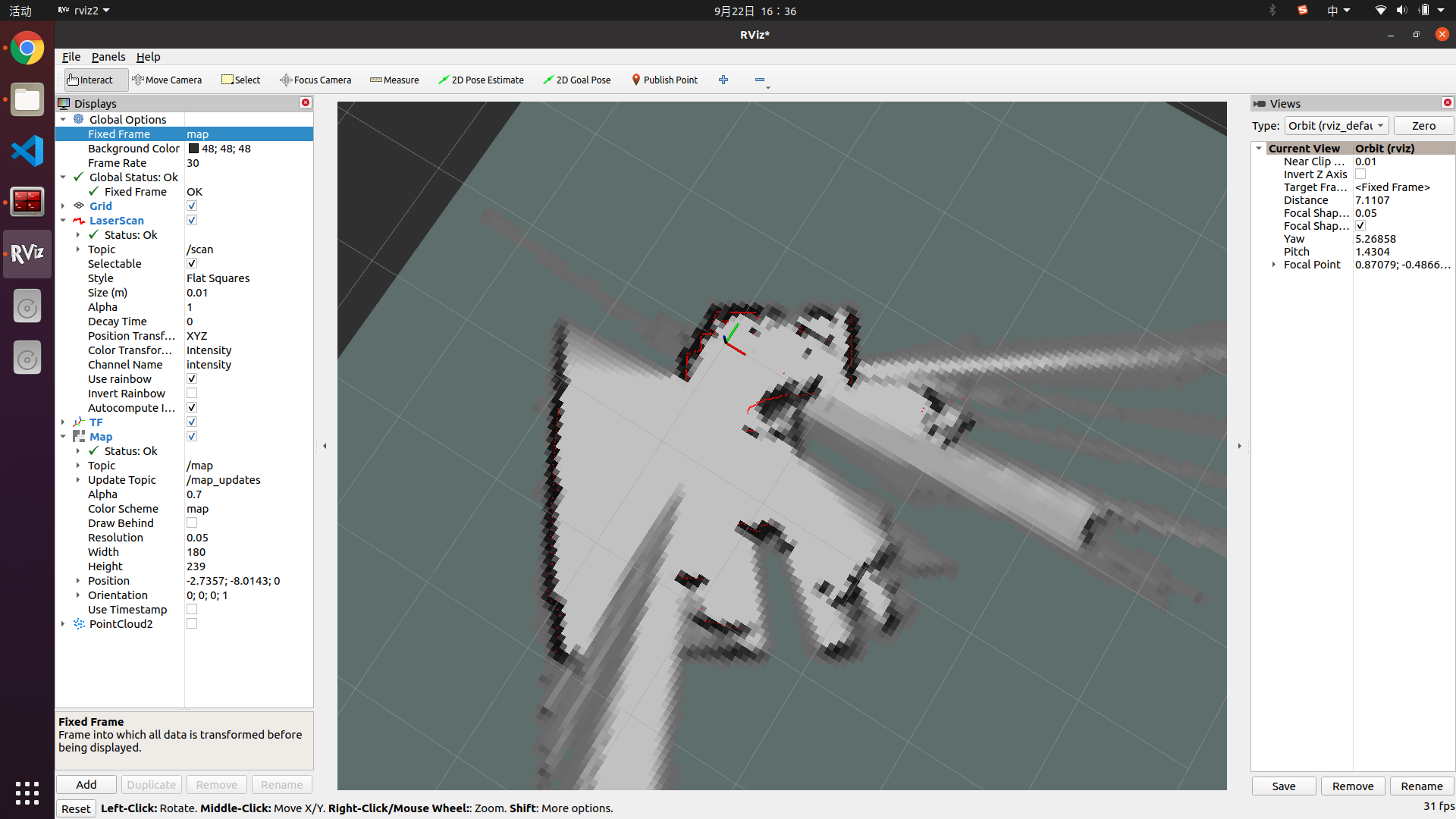
6.3 运行测试
catkin_make_isolated
# 首先运行 cartographer
roslaunch cartographer_ros cartoForRplidar.launch
# 然后运行 rplidar_ros
roslaunch rplidar_ros test_rplidar.launch
7 安装ROS foxy
安装过程及问题,见这里。
8 安装ros1_bridge
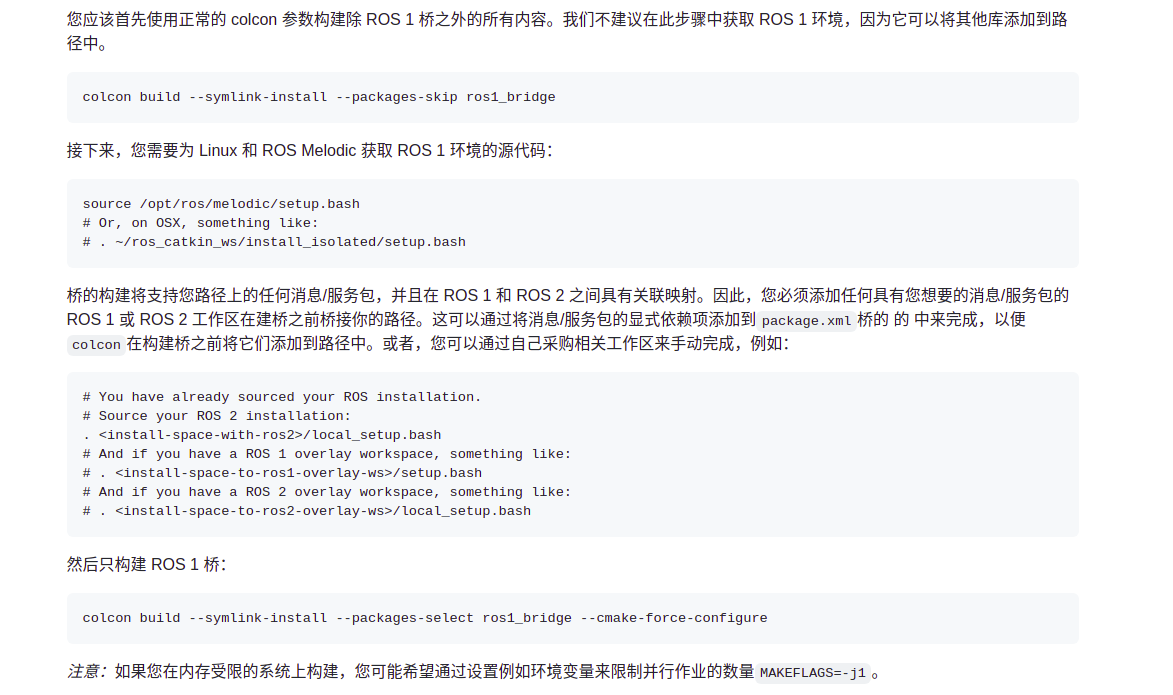
8.1 安装
树莓派编译ros2时,没有编译ros1_bridge,ros1_bridge需要在ros1和ros2两个环境下单独编译,过程见官网,时间1小时。
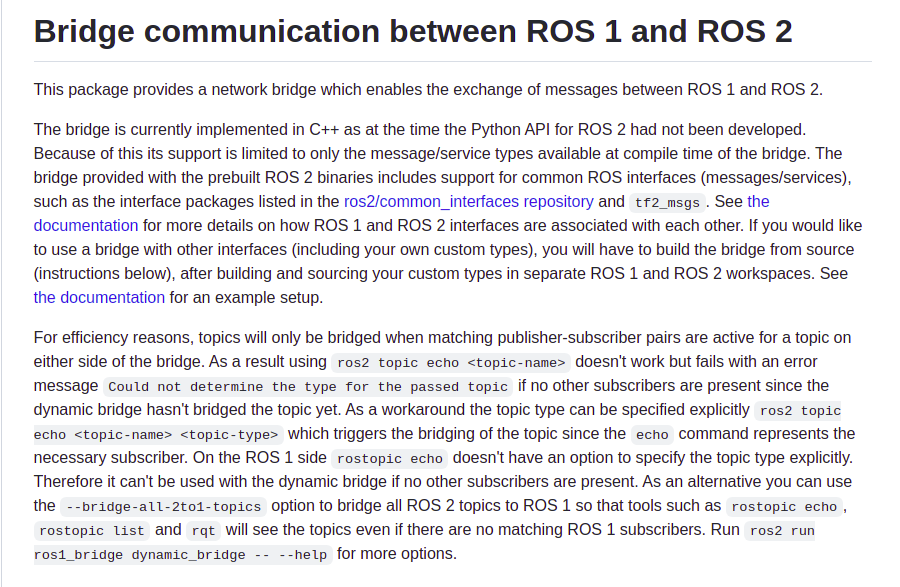
ros1_bridge使用方法,见这里。
8.2 使用与测试
- 所有话题桥接
ros2 run ros1_bridge dynamic_bridge --bridge-all-topics # 桥接所有话题,不加参数时,只有发布和订阅成对时,才桥接
- 具体桥接话题情况
仅桥接基本类型的话题,对于自定义消息类型(cartographer定义的消息类型也算)需要修改源码。
<1> 全局地图:cartographer发布的全局地图话题 /map 是 nav_msgs/OccupancyGrid 类型可以桥接。
<2> 位姿:TF可以桥接成功。计算位姿tracked_pose (geometry_msgs/PoseStamped)没有发布,Only published if the parameter publish_tracked_pose is set to true.
- 部分话题桥接
- 编写 bridge.yaml 文件如下
topics: - topic: /individual_map_r1 # ROS1 topic name type: nav_msgs/msg/OccupancyGrid # ROS2 type name queue_size: 1 # For the publisher back to ROS1 - topic: /tracked_pose_1 # ROS1 topic name type: geometry_msgs/msg/PoseStamped # ROS2 type name queue_size: 1 # For the publisher back to ROS- 加载参数
rosparam load bridge.yaml- 启动节点后,运行参数桥
ros2 run ros1_bridge parameter_bridge
9 镜像备份与恢复
为避免重新配置的诸多问题,可以将配置好的系统进行镜像备份(复制),然后写入新卡即可。
- 将已配置好系统的SD卡插入读卡器,然后接入linux系统电脑,查看磁盘分区名,如图是/media的两个分区
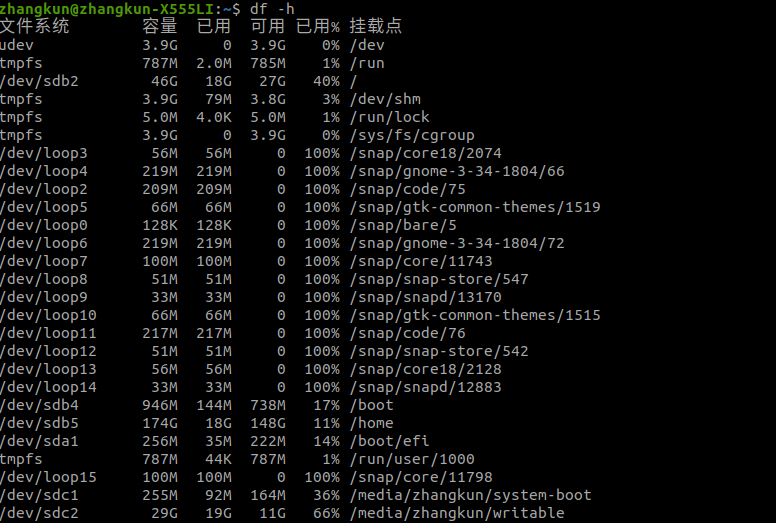
- 镜像备份:使用dd命令将整个分区镜像,同时压缩镜像,这里终端不会有进度显示,只需要等,30G的卡大概30min
sudo dd if=/dev/sdc | gzip>自定义路径/压缩包名.gz
- 恢复镜像:将格式化的新卡(空间不能比原卡小)插入读卡器,应该有一个分区(如 /dev/sdc1),执行如下dd命令,将开始写卡,时间长于备份,30G约两个小时,但是搞完之后,启动分区识别不了,因此还是用树莓派的烧录软件,又快又稳。
sudo gzip -dc 自定义路径/压缩包名.gz | sudo dd of=/dev/sdc
最后
以上就是缓慢滑板最近收集整理的关于ROS2_Foxy学习10——多机激光SLAM准备篇的全部内容,更多相关ROS2_Foxy学习10——多机激光SLAM准备篇内容请搜索靠谱客的其他文章。






![[ROS2 基础] Navigation2 导航系统介绍](https://www.shuijiaxian.com/files_image/reation/bcimg27.png)

发表评论 取消回复