opencv -Camera曝光设置
1、曝光设置
cv_cap.set(cv::CAP_PROP_AUTO_EXPOSURE, 0.25); // where 0.25 means "manual exposure, manual iris"
cv_cap.set(CV_CAP_PROP_EXPOSURE, -13);
2、设置自动曝光为手动曝光
cv_cap.set(cv::CAP_PROP_AUTO_EXPOSURE, 0.25); // where 0.25 means "manual exposure, manual iris"3、曝光参数具体对应于曝光时间
| OpenCV_exposure | 快门时间ms |
| -1 | 640 |
| -2 | 320 |
| -3 | 160 |
| -4 | 80 |
| -5 | 40 |
| -6 | 20 |
| -7 | 10 |
| -8 | 5 |
| -9 | 2.5 |
| -10 | 1.25 |
| -11 | 0.625 |
| -12 | 0.3125 |
| -13 | 0.15625 |
| -14 | 0.078125 |
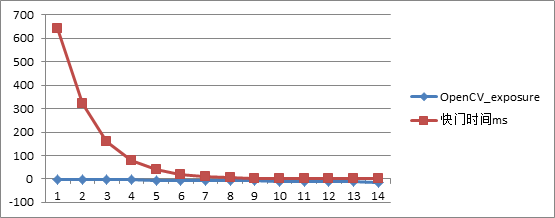
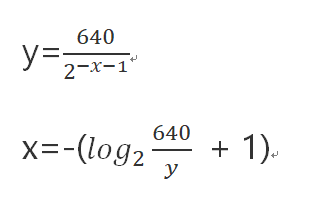
说明:x为opencv中设置的曝光值OpenCV_exposure
y为快门时间
4、代码实现:
void cameExposureTestAndExposureFusionTest(VideoCapture cap)
{
int ix = 0;
int numImages = 4;
Mat frame;
vector<Mat> images;
//是否图像映射
bool needsAlignment = true;
//cap.set()
auto i = cap.get(CAP_PROP_EXPOSURE);
cout << "设置之前曝光为:" << i << endl;
cap.set(CAP_PROP_AUTO_EXPOSURE, 0.25);
while (waitKey(30) != 27)
{
/*
int 循环调节 = -13;
while (1)
{
if (循环调节 == 0)
{
循环调节 = -13;
break;
}
//cout << "设置之后曝光为:" << cap.get(CAP_PROP_EXPOSURE);
cap.set(CAP_PROP_EXPOSURE, 循环调节);
//cout << "设置之后曝光为:" << cap.get(CAP_PROP_EXPOSURE)<<endl;
cap >> frame;
putText(frame, "Exposure:" + to_string(循环调节), Point(20, 30), 3, 1.0, Scalar(255, 0, 0));
imshow("调用摄像头", frame);
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTest\" + to_string(循环调节) + ".jpg", frame);
waitKey(30);
images.push_back(frame);
循环调节= 循环调节+1;
}
*/
vector<float> times;
// 曝光时间列表
const float timesArray[] = { 1 / 30.0f,0.25,2.5,15.0 };
times.assign(timesArray, timesArray + numImages);
// 曝光值列表
float OpenCV_exposure[] = {NULL };
//这里将快门时间转换成OpenCV的曝光参数
for (ix = 0; ix < 4; ix++)
{
OpenCV_exposure[ix] = -(log(640 / (timesArray[ix]*1000) ) + 1);
}
for (ix=0; ix<4; ix++)
{
cap.set(CAP_PROP_EXPOSURE, OpenCV_exposure[ix]);
cap >> frame;
imshow("调用摄像头", frame);
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTest\" + to_string(ix) + ".jpg", frame);
waitKey(30);
images.push_back(frame);
}
// Align input images
if (needsAlignment)
{
cout << "Aligning images ... " << endl;
Ptr<AlignMTB> alignMTB = createAlignMTB();
alignMTB->process(images, images);
}
else
{
cout << "Skipping alignment ... " << endl;
}
// 获取图像响应函数 (CRF)
Mat responseDebevec;
Ptr<CalibrateDebevec> calibrateDebevec = createCalibrateDebevec();
calibrateDebevec->process(images, responseDebevec, times);
// Merge using Exposure Fusion 图像融合
cout << "Merging using Exposure Fusion ... " << endl;
Mat exposureFusion;
Ptr<MergeMertens> mergeMertens = createMergeMertens();
mergeMertens->process(images, exposureFusion);
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\exposure-fusion.jpg", exposureFusion*255);
// 将图像合并为HDR线性图像
Mat hdrDebevec;
Ptr<MergeDebevec> mergeDebevec = createMergeDebevec();
mergeDebevec->process(images, hdrDebevec, times, responseDebevec);
// 保存图像
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\hdrDebevec.hdr", hdrDebevec);
// 使用Drago色调映射算法获得24位彩色图像
Mat ldrDrago;
Ptr<TonemapDrago> tonemapDrago = createTonemapDrago(1.0, 0.7);
tonemapDrago->process(hdrDebevec, ldrDrago);
ldrDrago = 3 * ldrDrago;
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\ldr-Drago.jpg", ldrDrago * 255);
// 使用Durand色调映射算法获得24位彩色图像
/*
Mat ldrDurand;
Ptr<TonemapDurand> tonemapDurand = createTonemapDurand(1.5, 4, 1.0, 1, 1);
tonemapDurand->process(hdrDebevec, ldrDurand);
ldrDurand = 3 * ldrDurand;
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\ldr-Durand.jpg", ldrDurand * 255);
*/
// 使用Reinhard色调映射算法获得24位彩色图像
Mat ldrReinhard;
Ptr<TonemapReinhard> tonemapReinhard = createTonemapReinhard(1.5, 0, 0, 0);
tonemapReinhard->process(hdrDebevec, ldrReinhard);
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\ldr-Reinhard.jpg", ldrReinhard * 255);
// 使用Mantiuk色调映射算法获得24位彩色图像
Mat ldrMantiuk;
Ptr<TonemapMantiuk> tonemapMantiuk = createTonemapMantiuk(2.2, 0.85, 1.2);
tonemapMantiuk->process(hdrDebevec, ldrMantiuk);
ldrMantiuk = 3 * ldrMantiuk;
imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255);
imwrite("E:\Project_OpenCV_C++\openCV_Test1\openCV_Test3\cameExposureTestAndExposureFusionTest\ldr-Mantiuk.jpg", ldrMantiuk * 255);
images.clear();
}
return;
}最后
以上就是个性滑板最近收集整理的关于OpenCV曝光参数和快门时间的对应关系的全部内容,更多相关OpenCV曝光参数和快门时间内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复