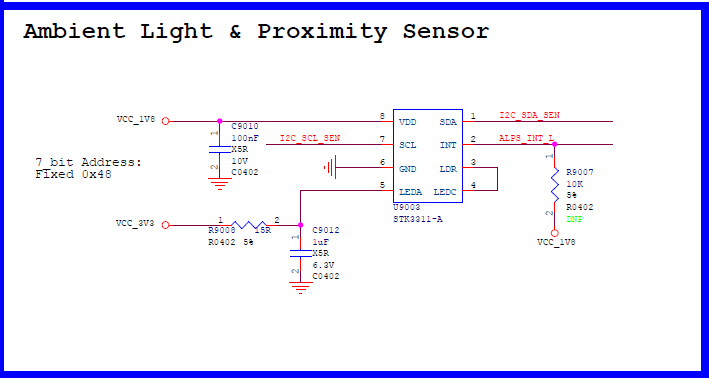
一、原理图,接口比较简单,就是I2C。
二、光感用轮询方式,距离用中断方式。代码。
1、dts配置
ls_stk3x1x: light@48 {
compatible = "ls_stk3x1x";
status = "okay";
reg = <0x48>;
type = <SENSOR_TYPE_LIGHT>;
irq_enable = <0>;
als_threshold_high = <100>;
als_threshold_low = <10>;
als_ctrl_gain = <2>; /* 0:x1 1:x4 2:x16 3:x64 */
poll_delay_ms = <100>;
layout = <1>;
};
ps_stk3x1x: proximity@48 {
compatible = "ps_stk3x1x";
status = "okay";
reg = <0x48>;
type = <SENSOR_TYPE_PROXIMITY>;
pinctrl-names = "default";
pinctrl-0 = <&al_det>;
irq-gpio = <&gpio0 RK_PD4 IRQ_TYPE_LEVEL_LOW>;
irq_enable = <1>;
ps_threshold_high = <0x200>;
ps_threshold_low = <0x100>;
ps_ctrl_gain = <3>; /* 0:x1 1:x4 2:x16 3:x64 */
ps_led_current = <3>; /* 0:12.5mA 1:25mA 2:50mA 3:100mA */
poll_delay_ms = <100>;
};2、光感驱动代码 kerneldriversinputsensorslsensorls_stk3x1x.c
/*
* ls_stk3x1x.c - Linux kernel modules for sensortek stk301x, stk321x and stk331x
* proximity/ambient light sensor
*
* Copyright (C) 2012~2015 Lex Hsieh / sensortek <lex_hsieh@sensortek.com.tw>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 675 Mass Ave, Cambridge, MA 02139, USA.
*/
#include <linux/module.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/i2c.h>
#include <linux/mutex.h>
#include <linux/kdev_t.h>
#include <linux/fs.h>
#include <linux/input.h>
#include <linux/workqueue.h>
#include <linux/irq.h>
#include <linux/delay.h>
#include <linux/sched.h>
#include <linux/kthread.h>
#include <linux/errno.h>
#include <linux/wakelock.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
#include <linux/fs.h>
#include <asm/uaccess.h>
#include <linux/sensor-dev.h>
#include <linux/of_gpio.h>
#include <linux/regulator/consumer.h>
#ifdef CONFIG_HAS_EARLYSUSPEND
//#include <linux/earlysuspend.h>
#endif
#include "linux/stk3x1x.h"
#define DRIVER_VERSION "3.10.0_0429"
/* Driver Settings */
#define STK_POLL_ALS /* ALS interrupt is valid only when STK_PS_INT_MODE = 1 or 4*/
// #define STK_IRS
#define STK_DEBUG_PRINTF
#define PROXIMITY_ID_I2C 2
/*****************************************************************************/
/* Define Register Map */
#define STK_STATE_REG 0x00
#define STK_PSCTRL_REG 0x01
#define STK_ALSCTRL_REG 0x02
#define STK_LEDCTRL_REG 0x03
#define STK_INT_REG 0x04
#define STK_WAIT_REG 0x05
#define STK_THDH1_PS_REG 0x06
#define STK_THDH2_PS_REG 0x07
#define STK_THDL1_PS_REG 0x08
#define STK_THDL2_PS_REG 0x09
#define STK_THDH1_ALS_REG 0x0A
#define STK_THDH2_ALS_REG 0x0B
#define STK_THDL1_ALS_REG 0x0C
#define STK_THDL2_ALS_REG 0x0D
#define STK_FLAG_REG 0x10
#define STK_DATA1_PS_REG 0x11
#define STK_DATA2_PS_REG 0x12
#define STK_DATA1_ALS_REG 0x13
#define STK_DATA2_ALS_REG 0x14
#define STK_DATA1_OFFSET_REG 0x15
#define STK_DATA2_OFFSET_REG 0x16
#define STK_DATA1_IR_REG 0x17
#define STK_DATA2_IR_REG 0x18
#define STK_PDT_ID_REG 0x3E
#define STK_RSRVD_REG 0x3F
#define STK_SW_RESET_REG 0x80
#define STK_STATE_EN_IRS_MASK 0x80
#define STK_STATE_EN_AK_MASK 0x40
#define STK_STATE_EN_ASO_MASK 0x20
#define STK_STATE_EN_IRO_MASK 0x10
#define STK_STATE_EN_WAIT_MASK 0x04
#define STK_STATE_EN_ALS_MASK 0x02
#define STK_STATE_EN_PS_MASK 0x01
#define STK_FLG_ALSDR_MASK 0x80
#define STK_FLG_PSDR_MASK 0x40
#define STK_FLG_ALSINT_MASK 0x20
#define STK_FLG_PSINT_MASK 0x10
#define STK_FLG_OUI_MASK 0x04
#define STK_FLG_IR_RDY_MASK 0x02
#define STK_FLG_NF_MASK 0x01
#define STK_INT_ALS 0x08
#define STK_IRC_MAX_ALS_CODE 20000
#define STK_IRC_MIN_ALS_CODE 25
#define STK_IRC_MIN_IR_CODE 50
#define STK_IRC_ALS_DENOMI 2
#define STK_IRC_ALS_NUMERA 5
#define STK_IRC_ALS_CORREC 850
#define STK_IRS_IT_REDUCE 2
#define STK_ALS_READ_IRS_IT_REDUCE 5
#define STK_ALS_THRESHOLD 30
/*****************************************************************************/
#define STK3310SA_PID 0x17
#define STK3311SA_PID 0x1E
#define STK3311WV_PID 0x1D
/*****************************************************************************/
#ifdef STK_ALS_FIR
#define STK_FIR_LEN 8
#define MAX_FIR_LEN 32
struct data_filter {
u16 raw[MAX_FIR_LEN];
int sum;
int number;
int idx;
};
#endif
struct stk3x1x_data {
uint16_t ir_code;
uint16_t als_correct_factor;
uint8_t alsctrl_reg;
uint8_t psctrl_reg;
uint8_t ledctrl_reg;
uint8_t state_reg;
int int_pin;
uint8_t wait_reg;
uint8_t int_reg;
#ifdef CONFIG_HAS_EARLYSUSPEND
//struct early_suspend stk_early_suspend;
#endif
uint16_t ps_thd_h;
uint16_t ps_thd_l;
#ifdef CALI_PS_EVERY_TIME
uint16_t ps_high_thd_boot;
uint16_t ps_low_thd_boot;
#endif
struct mutex io_lock;
struct input_dev *ps_input_dev;
int32_t ps_distance_last;
bool ps_enabled;
bool re_enable_ps;
struct wake_lock ps_wakelock;
#ifdef STK_POLL_PS
struct hrtimer ps_timer;
struct work_struct stk_ps_work;
struct workqueue_struct *stk_ps_wq;
struct wake_lock ps_nosuspend_wl;
#endif
struct input_dev *als_input_dev;
int32_t als_lux_last;
uint32_t als_transmittance;
bool als_enabled;
bool re_enable_als;
ktime_t ps_poll_delay;
ktime_t als_poll_delay;
#ifdef STK_POLL_ALS
struct work_struct stk_als_work;
struct hrtimer als_timer;
struct workqueue_struct *stk_als_wq;
#endif
bool first_boot;
#ifdef STK_TUNE0
uint16_t psa;
uint16_t psi;
uint16_t psi_set;
struct hrtimer ps_tune0_timer;
struct workqueue_struct *stk_ps_tune0_wq;
struct work_struct stk_ps_tune0_work;
ktime_t ps_tune0_delay;
bool tune_zero_init_proc;
uint32_t ps_stat_data[3];
int data_count;
int stk_max_min_diff;
int stk_lt_n_ct;
int stk_ht_n_ct;
#endif
#ifdef STK_ALS_FIR
struct data_filter fir;
atomic_t firlength;
#endif
atomic_t recv_reg;
#ifdef STK_GES
struct input_dev *ges_input_dev;
int ges_enabled;
int re_enable_ges;
atomic_t gesture2;
#endif
#ifdef STK_IRS
int als_data_index;
#endif
#ifdef STK_QUALCOMM_POWER_CTRL
struct regulator *vdd;
struct regulator *vio;
bool power_enabled;
#endif
uint8_t pid;
uint8_t p_wv_r_bd_with_co;
uint32_t als_code_last;
};
static struct stk3x1x_data *ps_data;
const int ALS_LEVEL[] = {100, 1600, 2250, 3200, 6400, 12800, 26000};
static void set_stk_power(bool flag)
{
struct regulator *ldo=NULL;
int ret;
ldo = regulator_get(NULL, "rk818_ldo2");
if(ldo==NULL){
printk("set_stk_sensor_power ldo is nulln");
return;
}
if(flag){
regulator_set_voltage(ldo, 3300000, 3300000);
ret = regulator_enable(ldo);
if(ret < 0){
printk("----->%s:enable error...n",__func__);
}
regulator_put(ldo);
}else{
regulator_disable(ldo);
regulator_put(ldo);
}
}
static struct stk3x1x_platform_data stk3x1x_pfdata={
.state_reg = 0x0, /* disable all */
.psctrl_reg = 0x31, /* ps_persistance=1, ps_gain=64X, PS_IT=0.391ms */
.alsctrl_reg = 0x39, /* als_persistance=1, als_gain=64X, ALS_IT=100ms */
.ledctrl_reg = 0xFF, /* 100mA IRDR, 64/64 LED duty */
.wait_reg = 0x07, /* 50 ms */
.ps_thd_h = 800,
.ps_thd_l = 600,
//.int_pin = sprd_3rdparty_gpio_pls_irq,
.transmittance = 500,
.stk_max_min_diff = 200,
.stk_lt_n_ct = 60,
.stk_ht_n_ct = 80,
};
/*****************************************************************************/
#ifndef STK_POLL_ALS
static int32_t stk3x1x_set_als_thd_l(struct i2c_client *client, uint16_t thd_l)
{
unsigned char val[3];
int ret;
val[0] = STK_THDL1_ALS_REG;
val[1] = (thd_l & 0xFF00) >> 8;
val[2] = thd_l & 0x00FF;
ret = sensor_tx_data(client, val, 3);
// ret = sensor_write_reg(client, STK_THDL1_ALS_REG, );
// if(ret)
// printk("%s:fail to active sensorn",__func__);
return ret;
}
static int32_t stk3x1x_set_als_thd_h(struct i2c_client *client, uint16_t thd_h)
{
unsigned char val[2];
int ret;
val[0] = STK_THDH1_ALS_REG;
val[1] = (thd_h & 0xFF00) >> 8;
val[2] = thd_h & 0x00FF;
ret = sensor_tx_data(client, val, 3);
// ret = sensor_write_reg(client, STK_THDL1_ALS_REG, );
// if(ret)
// printk("%s:fail to active sensorn",__func__);
return ret;
}
#endif
static int light_sensor_active(struct i2c_client *client, int enable, int rate)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
// int status = 0;
// char buffer[3] = {0};
// int high = 0x80, low = 0x60;
#ifdef STK_IRS
int ret = 0;
#endif
sensor->ops->ctrl_data = sensor_read_reg(client, sensor->ops->ctrl_reg);
#ifndef STK_POLL_ALS
if (enable)
{
stk3x1x_set_als_thd_h(client, 0x0000);
stk3x1x_set_als_thd_l(client, 0xFFFF);
}
#ifdef STK_IRS
if(enable && !(sensor->ops->ctrl_data & STK_STATE_EN_PS_MASK))
{
ret = stk3x1x_get_ir_reading(ps_data, STK_IRS_IT_REDUCE);
if(ret > 0)
ps_data->ir_code = ret;
}
#endif
#endif
sensor->ops->ctrl_data = (uint8_t)((sensor->ops->ctrl_data) & (~(STK_STATE_EN_ALS_MASK | STK_STATE_EN_WAIT_MASK)));
if(enable)
sensor->ops->ctrl_data |= STK_STATE_EN_ALS_MASK;
else if (sensor->ops->ctrl_data & STK_STATE_EN_PS_MASK)
sensor->ops->ctrl_data |= STK_STATE_EN_WAIT_MASK;
printk("%s:reg=0x%x,reg_ctrl=0x%x,enable=%dn",__func__,sensor->ops->ctrl_reg, sensor->ops->ctrl_data, enable);
result = sensor_write_reg(client, sensor->ops->ctrl_reg, sensor->ops->ctrl_data);
if(result)
printk("%s:fail to active sensorn",__func__);
if(enable)
{
#ifdef STK_IRS
ps_data->als_data_index = 0;
#endif
// sensor->ops->report(sensor->client);
}
ps_data->als_enabled = enable?true:false;
return result;
}
static int32_t stk3x1x_check_pid(struct i2c_client *client)
{
char value[2] = {0}, pid_msb;
int result;
ps_data->p_wv_r_bd_with_co = 0;
value[0] = STK_PDT_ID_REG;
result = sensor_rx_data(client, value, 2);
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
printk(KERN_INFO "%s: PID=0x%x, RID=0x%xn", __func__, value[0], value[1]);
ps_data->pid = value[0];
if(value[0] == STK3311WV_PID)
ps_data->p_wv_r_bd_with_co |= 0b100;
if(value[1] == 0xC3)
ps_data->p_wv_r_bd_with_co |= 0b010;
// if(stk3x1x_read_otp25(ps_data) == 1)
// {
// ps_data->p_wv_r_bd_with_co |= 0b001;
// }
printk(KERN_INFO "%s: p_wv_r_bd_with_co = 0x%xn", __func__, ps_data->p_wv_r_bd_with_co);
pid_msb = value[0] & 0xF0;
switch(pid_msb)
{
case 0x10:
case 0x20:
case 0x30:
return 0;
default:
printk(KERN_ERR "%s: invalid PID(%#x)n", __func__, value[0]);
return -1;
}
return 0;
}
static int light_sensor_init(struct i2c_client *client)
{
int res = 0;
printk("stk %s init ...n", __func__);
set_stk_power(1);
ps_data = kzalloc(sizeof(struct stk3x1x_data),GFP_KERNEL);
if(!ps_data)
{
printk(KERN_ERR "%s: failed to allocate stk3x1x_datan", __func__);
return -ENOMEM;
}
res = sensor_write_reg(client, STK_WAIT_REG, 0x7F);
if(res < 0){
printk("stk %s i2c test error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_read_reg(client, STK_WAIT_REG);
if(res != 0x7F)
{
printk("stk %s i2c test error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_SW_RESET_REG, 0x0);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
//usleep_range(13000, 15000);
res = stk3x1x_check_pid(client);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_STATE_REG, stk3x1x_pfdata.state_reg);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_PSCTRL_REG, stk3x1x_pfdata.psctrl_reg);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_ALSCTRL_REG, stk3x1x_pfdata.alsctrl_reg);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
if(ps_data->pid == STK3310SA_PID || ps_data->pid == STK3311SA_PID)
stk3x1x_pfdata.ledctrl_reg &= 0x3F;
res = sensor_write_reg(client, STK_LEDCTRL_REG, stk3x1x_pfdata.ledctrl_reg);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_WAIT_REG, stk3x1x_pfdata.wait_reg);
if(res < 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
#ifndef STK_POLL_ALS
value = STK_INT_REG;
res = sensor_rx_data(client, value, 1);
if(res){
printk("%s:line=%d,error=%dn",__func__,__LINE__, res);
return res;
}
value |= STK_INT_ALS;
res = sensor_write_reg(client, STK_INT_REG, value);
if(res <= 0){
printk("stk %s i2c error line:%dn", __func__,__LINE__);
goto EXIT_ERR;
}
#endif
ps_data->als_code_last = 0;
printk("stk %s init successful n", __func__);
return 0;
EXIT_ERR:
printk(KERN_ERR "stk init fail dev: %dn", res);
return res;
}
static int light_report_abs_value(struct input_dev *input, int data)
{
unsigned char index = 0;
if(data <= ALS_LEVEL[0]){
index = 0;goto report;
}
else if(data <= ALS_LEVEL[1]){
index = 1;goto report;
}
else if(data <= ALS_LEVEL[2]){
index = 2;goto report;
}
else if(data <= ALS_LEVEL[3]){
index = 3;goto report;
}
else if(data <= ALS_LEVEL[4]){
index = 4;goto report;
}
else if(data <= ALS_LEVEL[5]){
index = 5;goto report;
}
else if(data <= ALS_LEVEL[6]){
index = 6;goto report;
}
else{
index = 7;goto report;
}
report:
input_report_abs(input, ABS_MISC, index);
input_sync(input);
return index;
}
/*
static int stk_allreg(struct i2c_client *client)
{
uint8_t ps_reg[0x22];
int cnt = 0;
for(cnt=0;cnt<0x20;cnt++)
{
ps_reg[cnt] = sensor_read_reg(client, cnt);
if(ps_reg[cnt] < 0)
{
printk("%s fail n", __func__);
return -EINVAL;
}
printk(KERN_INFO "reg[0x%2X]=0x%2Xn", cnt, ps_reg[cnt]);
}
return 0;
}
*/
static int32_t stk3x1x_set_irs_it_slp(struct i2c_client *client, uint16_t *slp_time, int32_t ials_it_reduce)
{
int irs_alsctrl;
int32_t ret;
irs_alsctrl = (stk3x1x_pfdata.alsctrl_reg & 0x0F) - ials_it_reduce;
switch(irs_alsctrl)
{
case 2:
*slp_time = 1;
break;
case 3:
*slp_time = 2;
break;
case 4:
*slp_time = 3;
break;
case 5:
*slp_time = 6;
break;
case 6:
*slp_time = 12;
break;
case 7:
*slp_time = 24;
break;
case 8:
*slp_time = 48;
break;
case 9:
*slp_time = 96;
break;
case 10:
*slp_time = 192;
break;
default:
printk(KERN_ERR "%s: unknown ALS IT=0x%xn", __func__, irs_alsctrl);
ret = -EINVAL;
return ret;
}
irs_alsctrl |= (stk3x1x_pfdata.alsctrl_reg & 0xF0);
ret = sensor_write_reg(client, STK_ALSCTRL_REG, irs_alsctrl);
if(ret <= 0)
return ret;
return 0;
}
static int stk3x1x_get_ir_reading(struct i2c_client *client, int32_t als_it_reduce)
{
int res = 0;
int32_t word_data, ret;
int w_reg, retry = 0;
uint16_t irs_slp_time = 100;
char buffer[2] = {0};
ret = stk3x1x_set_irs_it_slp(client, &irs_slp_time, als_it_reduce);
if(ret < 0)
return ret;
w_reg = sensor_read_reg(client, STK_STATE_REG);
if(w_reg <= 0)
{
printk("stk %s i2c error(%d)n", __func__, w_reg);
return ret;
}
w_reg |= STK_STATE_EN_IRS_MASK;
res = sensor_write_reg(client, STK_STATE_REG, w_reg);
if(res <= 0)
return res;
msleep(irs_slp_time);
do
{
usleep_range(3000, 4000);
w_reg = sensor_read_reg(client, STK_FLAG_REG);
if(w_reg <= 0)
return w_reg;
retry++;
}while(retry < 10 && ((w_reg & STK_FLG_IR_RDY_MASK) == 0));
if(retry == 10)
{
printk(KERN_ERR "%s: ir data is not ready for a long timen", __func__);
return -EINVAL;
}
w_reg &= (~STK_FLG_IR_RDY_MASK);
res = sensor_write_reg(client, STK_FLAG_REG, w_reg);
if(res <= 0)
return res;
buffer[0] = STK_DATA1_IR_REG;
res = sensor_rx_data(client, buffer, 2);
if(res)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return res;
}
word_data = ((buffer[0]<<8) | buffer[1]);
printk(KERN_INFO "%s: ir=%dn", __func__, word_data);
res = sensor_write_reg(client, STK_ALSCTRL_REG, stk3x1x_pfdata.alsctrl_reg);
if(res <= 0)
return res;
return word_data;
}
#ifdef STK_IRS
static int stk_als_ir_skip_als(struct i2c_client *client, struct sensor_private_data *sensor)
{
int ret;
unsigned char buffer[2] = {0};
if(ps_data->als_data_index < 60000)
ps_data->als_data_index++;
else
ps_data->als_data_index = 0;
if( ps_data->als_data_index % 10 == 1)
{
buffer[0] = STK_DATA1_ALS_REG;
ret = sensor_rx_data(client, buffer, 2);
if(ret)
{
printk("%s:line=%d,error=%dn",__func__,__LINE__, ret);
return ret;
}
return 1;
}
return 0;
}
#endif
static int stk_als_cal(struct i2c_client *client, int *als_data)
{
int32_t ir_data = 0;
#ifdef STK_ALS_FIR
int index;
int firlen = atomic_read(&ps_data->firlength);
#endif
#ifdef STK_IRS
const int ir_enlarge = 1 << (STK_ALS_READ_IRS_IT_REDUCE - STK_IRS_IT_REDUCE);
#endif
if(ps_data->p_wv_r_bd_with_co & 0b010)
{
if(*als_data < STK_ALS_THRESHOLD && ps_data->als_code_last > 10000)
{
ir_data = stk3x1x_get_ir_reading(client, STK_ALS_READ_IRS_IT_REDUCE);
#ifdef STK_IRS
if(ir_data > 0)
ps_data->ir_code = ir_data * ir_enlarge;
#endif
// printk(KERN_INFO "%s: *als_data=%d, als_code_last=%d,ir_data=%dn",
// __func__, *als_data, ps_data->als_code_last, ir_data);
if(ir_data > (STK_ALS_THRESHOLD*3))
{
*als_data = ps_data->als_code_last;
}
}
#ifdef STK_IRS
else
{
ps_data->ir_code = 0;
}
#endif
}
ps_data->als_code_last = *als_data;
#ifdef STK_ALS_FIR
if(ps_data->fir.number < firlen)
{
ps_data->fir.raw[ps_data->fir.number] = *als_data;
ps_data->fir.sum += *als_data;
ps_data->fir.number++;
ps_data->fir.idx++;
}
else
{
index = ps_data->fir.idx % firlen;
ps_data->fir.sum -= ps_data->fir.raw[index];
ps_data->fir.raw[index] = *als_data;
ps_data->fir.sum += *als_data;
ps_data->fir.idx++;
*als_data = ps_data->fir.sum/firlen;
}
#endif
return 0;
}
#ifdef STK_IRS
static void stk_als_ir_get_corr(int32_t als)
{
int32_t als_comperator;
if(ps_data->ir_code)
{
ps_data->als_correct_factor = 1000;
if(als < STK_IRC_MAX_ALS_CODE && als > STK_IRC_MIN_ALS_CODE &&
ps_data->ir_code > STK_IRC_MIN_IR_CODE)
{
als_comperator = als * STK_IRC_ALS_NUMERA / STK_IRC_ALS_DENOMI;
if(ps_data->ir_code > als_comperator)
ps_data->als_correct_factor = STK_IRC_ALS_CORREC;
}
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: als=%d, ir=%d, als_correct_factor=%d", __func__,
als, ps_data->ir_code, ps_data->als_correct_factor);
#endif
ps_data->ir_code = 0;
}
return;
}
static int stk_als_ir_run(struct i2c_client *client)
{
int ret;
if(ps_data->als_data_index % 10 == 0)
{
if(ps_data->ps_distance_last != 0 && ps_data->ir_code == 0)
{
ret = stk3x1x_get_ir_reading(client, STK_IRS_IT_REDUCE);
if(ret > 0)
ps_data->ir_code = ret;
}
return ret;
}
return 0;
}
#endif
static int light_sensor_report_value(struct i2c_client *client)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
uint32_t value = 0;
unsigned char buffer[2] = {0};
char index = 0;
if(sensor->ops->read_len < 2) //sensor->ops->read_len = 1
{
printk("%s:lenth is error,len=%dn",__func__,sensor->ops->read_len);
return -1;
}
value = sensor_read_reg(client, STK_FLAG_REG);
if(value < 0)
{
printk("stk %s read STK_FLAG_REG, ret=%dn", __func__, value);
return value;
}
if(!(value & STK_FLG_ALSDR_MASK))
return 0;
#ifdef STK_IRS
result = stk_als_ir_skip_als(client, sensor);
if(result == 1)
return 0;
#endif
buffer[0] = sensor->ops->read_reg;
result = sensor_rx_data(client, buffer, sensor->ops->read_len);
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
value = (buffer[0] << 8) | buffer[1];
#ifdef STK_DEBUG_PRINTF
printk("%s: value == %d n",__func__,value);
#endif
stk_als_cal(client, &value);
#ifdef STK_IRS
stk_als_ir_get_corr(value);
value = value * ps_data->als_correct_factor / 1000;
#endif
index = light_report_abs_value(sensor->input_dev, value);
/*
if(sensor->pdata->irq_enable)
{
if(sensor->ops->int_status_reg)
{
value = sensor_read_reg(client, sensor->ops->int_status_reg);
}
if(value & STA_PS_INT)
{
value &= ~STA_PS_INT;
result = sensor_write_reg(client, sensor->ops->int_status_reg,value); //clear int
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
}
}
*/
#ifdef STK_IRS
stk_als_ir_run(client);
#endif
return result;
}
struct sensor_operate light_stk3x1x_ops = {
.name = "ls_stk3x1x",
.type = SENSOR_TYPE_LIGHT, //sensor type and it should be correct
.id_i2c = LIGHT_ID_STK3X1X, //i2c id number
.read_reg = STK_DATA1_ALS_REG, //read data
.read_len = 2, //data length
.id_reg = SENSOR_UNKNOW_DATA, //read device id from this register
.id_data = SENSOR_UNKNOW_DATA, //device id
.precision = 16, //16 bits
.ctrl_reg = STK_STATE_REG, //enable or disable
.int_status_reg = SENSOR_UNKNOW_DATA, //intterupt status register
.range = {100,65535}, //range
.brightness ={10,255}, //brightness
.trig = IRQF_TRIGGER_LOW | IRQF_ONESHOT | IRQF_SHARED,
.active = light_sensor_active,
.init = light_sensor_init,
.report = light_sensor_report_value,
};
static int light_stk3x1x_probe(struct i2c_client *client,
const struct i2c_device_id *devid)
{
return sensor_register_device(client, NULL, devid, &light_stk3x1x_ops);
}
static int light_stk3x1x_remove(struct i2c_client *client)
{
return sensor_unregister_device(client, NULL, &light_stk3x1x_ops);
}
static const struct i2c_device_id light_stk3x1x_id[] = {
{"ls_stk3x1x", LIGHT_ID_STK3X1X},
{}
};
static struct i2c_driver light_stk3x1x_driver = {
.probe = light_stk3x1x_probe,
.remove = light_stk3x1x_remove,
.shutdown = sensor_shutdown,
.id_table = light_stk3x1x_id,
.driver = {
.name = "light_stk3x1x",
#ifdef CONFIG_PM
.pm = &sensor_pm_ops,
#endif
},
};
module_i2c_driver(light_stk3x1x_driver);
MODULE_AUTHOR("Lex Hsieh <lex_hsieh@sensortek.com.tw>");
MODULE_DESCRIPTION("Sensortek stk3x1x Proximity Sensor driver");
MODULE_LICENSE("GPL");
MODULE_VERSION(DRIVER_VERSION);
二、距离传感驱动代码 kerneldriversinputsensorspsensorps_stk3x1x.c,代码里面带sensor->pdata->irq_enable部分的是我自己添加来根据dts里面的配置irq_enable来处理中断的模式,默认是轮询模式。
/*
* ps_stk3x1x.c - Linux kernel modules for sensortek stk301x, stk321x and stk331x
* proximity/ambient light sensor
*
* Copyright (C) 2012~2015 Lex Hsieh / sensortek <lex_hsieh@sensortek.com.tw>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 675 Mass Ave, Cambridge, MA 02139, USA.
*/
#include <linux/module.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/i2c.h>
#include <linux/mutex.h>
#include <linux/kdev_t.h>
#include <linux/fs.h>
#include <linux/input.h>
#include <linux/workqueue.h>
#include <linux/irq.h>
#include <linux/delay.h>
#include <linux/sched.h>
#include <linux/kthread.h>
#include <linux/errno.h>
#include <linux/wakelock.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
#include <linux/fs.h>
#include <asm/uaccess.h>
#include <linux/sensor-dev.h>
#include <linux/of_gpio.h>
#ifdef CONFIG_HAS_EARLYSUSPEND
//#include <linux/earlysuspend.h>
#endif
#define DRIVER_VERSION "3.10.0_0429"
//#define STK_POLL_PS
#define STK_TUNE0
#define STK_DEBUG_PRINTF
#include "linux/stk3x1x.h"
/* Define Register Map */
#define STK_STATE_REG 0x00
#define STK_PSCTRL_REG 0x01
#define STK_ALSCTRL_REG 0x02
#define STK_LEDCTRL_REG 0x03
#define STK_INT_REG 0x04
#define STK_WAIT_REG 0x05
#define STK_THDH1_PS_REG 0x06
#define STK_THDH2_PS_REG 0x07
#define STK_THDL1_PS_REG 0x08
#define STK_THDL2_PS_REG 0x09
#define STK_THDH1_ALS_REG 0x0A
#define STK_THDH2_ALS_REG 0x0B
#define STK_THDL1_ALS_REG 0x0C
#define STK_THDL2_ALS_REG 0x0D
#define STK_FLAG_REG 0x10
#define STK_DATA1_PS_REG 0x11
#define STK_DATA2_PS_REG 0x12
#define STK_DATA1_ALS_REG 0x13
#define STK_DATA2_ALS_REG 0x14
#define STK_DATA1_OFFSET_REG 0x15
#define STK_DATA2_OFFSET_REG 0x16
#define STK_DATA1_IR_REG 0x17
#define STK_DATA2_IR_REG 0x18
#define STK_PDT_ID_REG 0x3E
#define STK_RSRVD_REG 0x3F
#define STK_SW_RESET_REG 0x80
#define STK_STATE_EN_IRS_MASK 0x80
#define STK_STATE_EN_AK_MASK 0x40
#define STK_STATE_EN_ASO_MASK 0x20
#define STK_STATE_EN_IRO_MASK 0x10
#define STK_STATE_EN_WAIT_MASK 0x04
#define STK_STATE_EN_ALS_MASK 0x02
#define STK_STATE_EN_PS_MASK 0x01
#define STK_FLG_ALSDR_MASK 0x80
#define STK_FLG_PSDR_MASK 0x40
#define STK_FLG_ALSINT_MASK 0x20
#define STK_FLG_PSINT_MASK 0x10
#define STK_FLG_OUI_MASK 0x04
#define STK_FLG_IR_RDY_MASK 0x02
#define STK_FLG_NF_MASK 0x01
#define STK_INT_ALS 0x08
/*****************************************************************************/
#define STK_MAX_MIN_DIFF 200
#define STK_LT_N_CT 100
#define STK_HT_N_CT 150
/*****************************************************************************/
#define STK3310SA_PID 0x17
#define STK3311SA_PID 0x1E
#define STK3311WV_PID 0x1D
/*****************************************************************************/
/* INT 0x04 */
#define PS_INT_DISABLE 0xF8
#define PS_INT_ENABLE (1 << 0)
#define PS_INT_ENABLE_FLGNFH (2 << 0)
#define PS_INT_ENABLE_FLGNFL (3 << 0)
#define PS_INT_MODE_ENABLE (4 << 0)
#define PS_INT_ENABLE_THL (5 << 0)
#define PS_INT_ENABLE_THH (6 << 0)
#define PS_INT_ENABLE_THHL (7 << 0)
#define ALS_INT_DISABLE (0 << 3)
#define ALS_INT_ENABLE (1 << 3)
#define INT_CTRL_PS_OR_LS (0 << 7)
#define INT_CTRL_PS_AND_LS (1 << 7)
/* FLAG 0x10 */
/* FLAG 0x10 */
#define STK_FLAG_NF (1 << 0)
#define STK_FLAG_IR_RDY (1 << 1)
#define STK_FLAG_OUI (1 << 2)
#define STK_FLAG_PSINT (1 << 4)
#define STK_FLAG_ALSINT (1 << 5)
#define STK_FLAG_PSDR (1 << 6)
#define STK_FLAG_ALSDR (1 << 7)
#ifdef STK_ALS_FIR
#define STK_FIR_LEN 8
#define MAX_FIR_LEN 32
struct data_filter {
u16 raw[MAX_FIR_LEN];
int sum;
int number;
int idx;
};
#endif
struct stk3x1x_data {
int int_pin;
uint16_t ps_thd_h;
uint16_t ps_thd_l;
#ifdef CALI_PS_EVERY_TIME
uint16_t ps_high_thd_boot;
uint16_t ps_low_thd_boot;
#endif
int32_t ps_distance_last;
bool ps_enabled;
// bool re_enable_ps;
bool first_boot;
#ifdef STK_TUNE0
uint16_t psa;
uint16_t psi;
uint16_t psi_set;
struct hrtimer ps_tune0_timer;
struct workqueue_struct *stk_ps_tune0_wq;
struct work_struct stk_ps_tune0_work;
ktime_t ps_tune0_delay;
bool tune_zero_init_proc;
uint32_t ps_stat_data[3];
int data_count;
int stk_max_min_diff;
int stk_lt_n_ct;
int stk_ht_n_ct;
#endif
atomic_t recv_reg;
uint8_t pid;
uint8_t p_wv_r_bd_with_co;
};
struct stk3x1x_data *ps_data;
/*****************************************************************************/
static struct stk3x1x_platform_data stk3x1x_pfdata={
.state_reg = 0x0, /* disable all */
.psctrl_reg = 0x31, /* ps_persistance=1, ps_gain=64X, PS_IT=0.391ms */
.alsctrl_reg = 0x39, /* als_persistance=1, als_gain=64X, ALS_IT=100ms */
.ledctrl_reg = 0xFF, /* 100mA IRDR, 64/64 LED duty */
.wait_reg = 0x07, /* 50 ms */
.ps_thd_h = 1700,
.ps_thd_l = 1500,
//.int_pin = sprd_3rdparty_gpio_pls_irq,
.transmittance = 500,
#if defined(CONFIG_SOFIA_3GR_BND_I706)
.stk_max_min_diff = 15,
.stk_lt_n_ct = 50,
.stk_ht_n_ct = 75,
#else
.stk_max_min_diff = 10,
.stk_lt_n_ct = 45,
.stk_ht_n_ct = 60,
#endif
};
static int32_t stk3x1x_check_pid(struct i2c_client *client);
static int stk_ps_tune_zero_init(struct i2c_client *client);
/*****************************************************************************/
static int32_t stk3x1x_set_ps_thd_h(struct i2c_client *client, uint16_t thd_h)
{
unsigned char val[2];
int ret;
val[0] = (thd_h & 0xFF00) >> 8;
val[1] = thd_h & 0x00FF;
ret = sensor_write_reg(client, STK_THDH1_PS_REG, val[0]);
if(ret < 0){
printk("%s: fail, ret=%dn", __func__, ret);
}
ret = sensor_write_reg(client, STK_THDH2_PS_REG, val[1]);
if(ret < 0){
printk("%s: fail, ret=%dn", __func__, ret);
}
return ret;
}
static int32_t stk3x1x_set_ps_thd_l(struct i2c_client *client, uint16_t thd_l)
{
unsigned char val[2];
int ret;
val[0] = (thd_l & 0xFF00) >> 8;
val[1] = thd_l & 0x00FF;
ret = sensor_write_reg(client, STK_THDL1_PS_REG, val[0]);
if(ret < 0){
printk("%s: fail, ret=%dn", __func__, ret);
}
ret = sensor_write_reg(client, STK_THDL2_PS_REG, val[1]);
if(ret < 0){
printk("%s: fail, ret=%dn", __func__, ret);
}
return ret;
}
/*
static uint32_t stk3x1x_get_ps_reading(struct i2c_client *client, u16 *data)
{
unsigned char value[2];
int err = 0;
value[0] = sensor_read_reg(client, STK_DATA1_PS_REG);
if(value[0] < 0){
goto EXIT_ERR;
}
value[1] = sensor_read_reg(client, STK_DATA2_PS_REG);
if(value[1] < 0){
goto EXIT_ERR;
}
*data = ((value[0]<<8) | value[1]);
return 0;
EXIT_ERR:
printk("stk3x1x_read_ps failn");
return err;
}
*/
static int proximity_sensor_active(struct i2c_client *client, int enable, int rate)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
// u16 ps_code;
#ifdef STK_DEBUG_PRINTF
printk("%s init proc = %dn", __func__, (ps_data->tune_zero_init_proc ? 1 : 0));
#endif
sensor->ops->ctrl_data = sensor_read_reg(client, sensor->ops->ctrl_reg);
sensor->ops->ctrl_data &= ~(STK_STATE_EN_PS_MASK | STK_STATE_EN_WAIT_MASK);
if(enable)
{
sensor->ops->ctrl_data |= STK_STATE_EN_PS_MASK;
if(!(sensor->ops->ctrl_data & STK_STATE_EN_ALS_MASK))
sensor->ops->ctrl_data |= STK_STATE_EN_WAIT_MASK;
}
#ifdef STK_DEBUG_PRINTF
printk("%s:reg=0x%x,reg_ctrl=0x%x,enable=%dn",__func__,sensor->ops->ctrl_reg, sensor->ops->ctrl_data, enable);
#endif
result = sensor_write_reg(client, sensor->ops->ctrl_reg, sensor->ops->ctrl_data);
if(result)
printk("%s:fail to active sensorn",__func__);
if(enable)
{
usleep_range(4000, 5000);
sensor->ops->report(sensor->client);
// stk3x1x_get_ps_reading(client, &ps_code);
// stk3x1x_set_ps_thd_h(client, ps_code + STK_HT_N_CT);
// stk3x1x_set_ps_thd_l(client, ps_code + STK_LT_N_CT);
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: thdh:%d, thdl:%dn", __func__, ps_data->ps_thd_h, ps_data->ps_thd_l);
#endif
stk3x1x_set_ps_thd_h(client, ps_data->ps_thd_h);
stk3x1x_set_ps_thd_l(client, ps_data->ps_thd_l);
}
ps_data->ps_enabled = enable?true:false;
ps_data->ps_distance_last = 1;
ps_data->psa = 0x0;
ps_data->psi = 0xFFFF;
ps_data->psi_set = 0;
ps_data->stk_max_min_diff = stk3x1x_pfdata.stk_max_min_diff;
ps_data->stk_lt_n_ct = stk3x1x_pfdata.stk_lt_n_ct;
ps_data->stk_ht_n_ct = stk3x1x_pfdata.stk_ht_n_ct;
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: lt:%d ht:%d max diff:%dn", __func__, ps_data->stk_lt_n_ct, ps_data->stk_ht_n_ct, ps_data->stk_max_min_diff);
#endif
return result;
}
static int32_t stk3x1x_check_pid(struct i2c_client *client)
{
char value[2] = {0}, pid_msb;
int result;
ps_data->p_wv_r_bd_with_co = 0;
value[0] = STK_PDT_ID_REG;
result = sensor_rx_data(client, value, 2);
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: PID=0x%x, RID=0x%xn", __func__, value[0], value[1]);
#endif
ps_data->pid = value[0];
if(value[0] == STK3311WV_PID)
ps_data->p_wv_r_bd_with_co |= 0b100;
if(value[1] == 0xC3)
ps_data->p_wv_r_bd_with_co |= 0b010;
// if(stk3x1x_read_otp25(ps_data) == 1)
// {
// ps_data->p_wv_r_bd_with_co |= 0b001;
// }
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: p_wv_r_bd_with_co = 0x%xn", __func__, ps_data->p_wv_r_bd_with_co);
#endif
pid_msb = value[0] & 0xF0;
switch(pid_msb)
{
case 0x10:
case 0x20:
case 0x30:
return 0;
default:
printk(KERN_ERR "%s: invalid PID(%#x)n", __func__, value[0]);
return -1;
}
return 0;
}
/*
static int stk_allreg(struct i2c_client *client)
{
uint8_t ps_reg[0x22];
int cnt = 0;
for(cnt=0;cnt<0x20;cnt++)
{
ps_reg[cnt] = sensor_read_reg(client, cnt);
if(ps_reg[cnt] < 0)
{
printk("%s fail n", __func__);
return -EINVAL;
}
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "reg[0x%2X]=0x%2Xn", cnt, ps_reg[cnt]);
#endif
}
return 0;
}
*/
#ifdef STK_TUNE0
static int stk_ps_val(struct i2c_client *client)
{
int mode;
int32_t word_data, lii;
unsigned char value[4];
int ret;
value[0] = 0x20;
ret = sensor_rx_data(client, value, 4);
if(ret)
{
printk("%s:line=%d,error=%dn",__func__,__LINE__, ret);
return ret;
}
word_data = (value[0]<<8) | value[1];
word_data += ((value[2]<<8) | value[3]);
mode = (stk3x1x_pfdata.psctrl_reg) & 0x3F;
if(mode == 0x30)
lii = 100;
else if (mode == 0x31)
lii = 200;
else if (mode == 0x32)
lii = 400;
else if (mode == 0x33)
lii = 800;
else
{
printk(KERN_ERR "%s: unsupported PS_IT(0x%x)n", __func__, mode);
return -1;
}
if(word_data > lii)
{
printk(KERN_INFO "%s: word_data=%d, lii=%dn", __func__, word_data, lii);
return 0xFFFF;
}
return 0;
}
static int stk_ps_tune_zero_final(struct i2c_client *client)
{
int ret;
int value;
value = 0;
#ifndef STK_POLL_PS
value |= 0x01;
#endif
#ifndef STK_POLL_ALS
value |= STK_INT_ALS;
#endif
ret = sensor_write_reg(client, STK_INT_REG, value);
if(ret <= 0)
return ret;
value = sensor_read_reg(client, STK_STATE_REG);
if(!(value & STK_STATE_EN_ALS_MASK))
value |= STK_STATE_EN_WAIT_MASK;
if(ps_data->ps_enabled)
value |= STK_STATE_EN_PS_MASK;
ret = sensor_write_reg(client, STK_STATE_REG, value);
if (ret < 0)
{
printk(KERN_ERR "%s: write i2c errorn", __func__);
return ret;
}
if(ps_data->data_count == -1)
{
printk(KERN_INFO "%s: exceed limitn", __func__);
ps_data->tune_zero_init_proc = false;
return 0;
}
ps_data->psa = ps_data->ps_stat_data[0];
ps_data->psi = ps_data->ps_stat_data[2];
ps_data->ps_thd_h = ps_data->ps_stat_data[1] + ps_data->stk_ht_n_ct;
ps_data->ps_thd_l = ps_data->ps_stat_data[1] + ps_data->stk_lt_n_ct;
stk3x1x_set_ps_thd_h(client, ps_data->ps_thd_h);
stk3x1x_set_ps_thd_l(client, ps_data->ps_thd_l);
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "stk %s: set HT=%d,LT=%dn", __func__, ps_data->ps_thd_h, ps_data->ps_thd_l);
#endif
ps_data->tune_zero_init_proc = false;
return 0;
}
static int32_t stk_tune_zero_get_ps_data(struct i2c_client *client, int ps_adc)
{
int ret;
ret = stk_ps_val(client);
if(ret == 0xFFFF)
{
ps_data->data_count = -1;
stk_ps_tune_zero_final(client);
return 0;
}
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: ps_adc #%d=%dn", __func__, ps_data->data_count, ps_adc);
#endif
ps_data->ps_stat_data[1] += ps_adc;
if(ps_adc > ps_data->ps_stat_data[0])
ps_data->ps_stat_data[0] = ps_adc;
if(ps_adc < ps_data->ps_stat_data[2])
ps_data->ps_stat_data[2] = ps_adc;
ps_data->data_count++;
if(ps_data->data_count == 5)
{
ps_data->ps_stat_data[1] /= ps_data->data_count;
stk_ps_tune_zero_final(client);
}
return 0;
}
static int stk_ps_tune_zero_init(struct i2c_client *client)
{
//struct sensor_private_data *sensor =
// (struct sensor_private_data *) i2c_get_clientdata(client);
ps_data->psa = 0x0;
ps_data->psi = 0xFFFF;
ps_data->psi_set = 0;
ps_data->ps_stat_data[0] = 0;
ps_data->ps_stat_data[2] = 9999;
ps_data->ps_stat_data[1] = 0;
ps_data->data_count = 0;
ps_data->tune_zero_init_proc = false;
/*
sensor->ops->ctrl_data = sensor_read_reg(client, sensor->ops->ctrl_reg);
sensor->ops->ctrl_data &= ~(STK_STATE_EN_PS_MASK | STK_STATE_EN_WAIT_MASK);
sensor->ops->ctrl_data |= STK_STATE_EN_PS_MASK;
if(!(sensor->ops->ctrl_data & STK_STATE_EN_ALS_MASK))
sensor->ops->ctrl_data |= STK_STATE_EN_WAIT_MASK;
result = sensor_write_reg(client, sensor->ops->ctrl_reg, sensor->ops->ctrl_data);
if(result)
printk("%s:fail to active sensorn",__func__);
#ifdef STK_DEBUG_PRINTF
printk("%s:reg=0x%x,reg_ctrl=0x%xn",__func__,sensor->ops->ctrl_reg, sensor->ops->ctrl_data);
#endif
result = sensor_write_reg(client, STK_INT_REG, 0);
if(result)
printk("%s:fail to active sensorn",__func__);
*/
return 0;
}
static int stk_ps_tune_zero_func_fae(struct i2c_client *client, int word_data)
{
int ret, diff;
#ifdef STK_DEBUG_PRINTF
//int cnt = 0;
//int ps_reg[0x22];
#endif
if(ps_data->psi_set || !(ps_data->ps_enabled))
return 0;
ret = stk_ps_val(client);
if(ret == 0)
{
if(word_data == 0)
{
//printk(KERN_ERR "%s: incorrect word data (0)n", __func__);
return 0xFFFF;
}
if(word_data > ps_data->psa)
{
ps_data->psa = word_data;
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: update psa: psa=%d,psi=%dn", __func__, ps_data->psa, ps_data->psi);
#endif
}
if(word_data < ps_data->psi)
{
ps_data->psi = word_data;
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: update psi: psa=%d,psi=%dn", __func__, ps_data->psa, ps_data->psi);
#endif
}
}
diff = ps_data->psa - ps_data->psi;
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: diff:%d psa:%d, psi:%d max diff:%dn", __func__, diff, ps_data->psa, ps_data->psi, ps_data->stk_max_min_diff);
#endif
if(diff > ps_data->stk_max_min_diff)
{
ps_data->psi_set = ps_data->psi;
ps_data->ps_thd_h = ps_data->psi + ps_data->stk_ht_n_ct;
ps_data->ps_thd_l = ps_data->psi + ps_data->stk_lt_n_ct;
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: tune0 thd_h:%d thd_l:%dn", __func__, ps_data->ps_thd_h, ps_data->ps_thd_l);
#endif
#if 0 //def STK_DEBUG_PRINTF
cnt = 0x6;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x7;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x8;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x9;
ps_reg[cnt] = sensor_read_reg(client, cnt);
printk(KERN_INFO "%s: befor [0x06/0x07]%d, %d [0x08/0x09]%d, %d n", __func__, ps_reg[0x6], ps_reg[0x7], ps_reg[0x8], ps_reg[0x9]);
#endif
stk3x1x_set_ps_thd_h(client, ps_data->ps_thd_h);
stk3x1x_set_ps_thd_l(client, ps_data->ps_thd_l);
#if 0 //def STK_DEBUG_PRINTF
cnt = 0x6;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x7;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x8;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x9;
ps_reg[cnt] = sensor_read_reg(client, cnt);
printk(KERN_INFO "%s: after [0x06/0x07]%d, %d [0x08/0x09]%d, %d n", __func__, ps_reg[0x6], ps_reg[0x7], ps_reg[0x8], ps_reg[0x9]);
#endif
#ifdef STK_DEBUG_PRINTF
printk(KERN_INFO "%s: FAE tune0 found thd_h:%d thd_l:%dn", __func__, ps_data->ps_thd_h, ps_data->ps_thd_l);
#endif
}
return 0;
}
#endif
static int stk_ps_report(struct i2c_client *client, int ps)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
char buffer[2] = {0};
int reg_flag = 0;
#if 0 //def STK_DEBUG_PRINTF
int cnt = 0;
int ps_reg[0x22];
#endif
buffer[0] = STK_FLAG_REG;
result = sensor_rx_data(client, buffer, 1);
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
reg_flag = buffer[0];
reg_flag = (reg_flag & 0x1);
ps_data->ps_distance_last = reg_flag ? 1:0;
#if 0 //def STK_DEBUG_PRINTF
cnt = 0x6;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x7;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x8;
ps_reg[cnt] = sensor_read_reg(client, cnt);
cnt = 0x9;
ps_reg[cnt] = sensor_read_reg(client, cnt);
printk(KERN_INFO "%s: [0x06/0x07]%d, %d [0x08/0x09]%d, %d n", __func__, ps_reg[0x6], ps_reg[0x7], ps_reg[0x8], ps_reg[0x9]);
#endif
if(ps > ps_data->ps_thd_h){
ps_data->ps_distance_last = 0;
}else if(ps < ps_data->ps_thd_l){
ps_data->ps_distance_last = 1;
}
input_report_abs(sensor->input_dev, ABS_DISTANCE, ps_data->ps_distance_last);
input_sync(sensor->input_dev);
#ifdef STK_DEBUG_PRINTF
printk("%s:ps=0x%x,flag=%d, dis=%dn",__func__, ps,reg_flag, ps_data->ps_distance_last);
#endif
return 0;
}
static int proximity_sensor_init(struct i2c_client *client)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *)i2c_get_clientdata(client);
int res = 0;
char value;
int val = 0;
printk("stk %s init ...n", __func__);
ps_data = kzalloc(sizeof(struct stk3x1x_data),GFP_KERNEL);
if(!ps_data)
{
printk(KERN_ERR "%s: failed to allocate stk3x1x_datan", __func__);
return -ENOMEM;
}
res = sensor_write_reg(client, STK_WAIT_REG, 0x7F);
if(res < 0){
printk("stk %s int error 1n", __func__);
goto EXIT_ERR;
}
value = sensor_read_reg(client, STK_WAIT_REG);
if(value != 0x7F)
{
printk("stk %s i2c test errorn", __func__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_SW_RESET_REG, 0x0);
if(res < 0){
printk("stk %s int error 2n", __func__);
goto EXIT_ERR;
}
//usleep_range(13000, 15000);
res = stk3x1x_check_pid(client);
if(res < 0){
printk("stk %s int error 3n", __func__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_STATE_REG, stk3x1x_pfdata.state_reg);
if(res < 0){
printk("stk %s int error 4n", __func__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_PSCTRL_REG, stk3x1x_pfdata.psctrl_reg);
if(res < 0){
printk("stk %s int error 5n", __func__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_ALSCTRL_REG, stk3x1x_pfdata.alsctrl_reg);
if(res < 0){
printk("stk %s int error 6n", __func__);
goto EXIT_ERR;
}
if(ps_data->pid == STK3310SA_PID || ps_data->pid == STK3311SA_PID)
stk3x1x_pfdata.ledctrl_reg &= 0x3F;
res = sensor_write_reg(client, STK_LEDCTRL_REG, stk3x1x_pfdata.ledctrl_reg);
if(res < 0){
printk("stk %s int error 7n", __func__);
goto EXIT_ERR;
}
res = sensor_write_reg(client, STK_WAIT_REG, stk3x1x_pfdata.wait_reg);
if(res < 0){
printk("stk %s int error 8n", __func__);
goto EXIT_ERR;
}
value = 0x0;
res = sensor_write_reg(client, STK_INT_REG, value);
if(res < 0){
printk("stk %s int error 10n", __func__);
goto EXIT_ERR;
}
stk3x1x_set_ps_thd_h(client, stk3x1x_pfdata.ps_thd_h);
stk3x1x_set_ps_thd_l(client, stk3x1x_pfdata.ps_thd_l);
printk("stk %s initing n", __func__);
#ifdef STK_TUNE0
stk_ps_tune_zero_init(client);
#endif
#ifdef STK_ALS_FIR
memset(&ps_data->fir, 0x00, sizeof(ps_data->fir));
atomic_set(&ps_data->firlength, STK_FIR_LEN);
#endif
atomic_set(&ps_data->recv_reg, 0);
ps_data->ps_enabled = false;
ps_data->ps_distance_last = 1;
ps_data->stk_max_min_diff = stk3x1x_pfdata.stk_max_min_diff;
ps_data->stk_lt_n_ct = stk3x1x_pfdata.stk_lt_n_ct;
ps_data->stk_ht_n_ct = stk3x1x_pfdata.stk_ht_n_ct;
ps_data->ps_thd_h = stk3x1x_pfdata.ps_thd_h;
ps_data->ps_thd_l = stk3x1x_pfdata.ps_thd_l;
printk("stk %s init successful n", __func__);
val = sensor_read_reg(client, STK_INT_REG);
val &= ~INT_CTRL_PS_AND_LS;
if (sensor->pdata->irq_enable)
val |= PS_INT_ENABLE;
else
val &= ~PS_INT_ENABLE;
res = sensor_write_reg(client, STK_INT_REG, val);
if (res) {
dev_err(&client->dev, "%s:write INT_CTRL failn", __func__);
return res;
}
return 0;
EXIT_ERR:
printk(KERN_ERR "stk init fail dev: %dn", res);
return res;
}
static int proximity_sensor_report_value(struct i2c_client *client)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
int value = 0;
char buffer[2] = {0};
//printk("stk %sn", __func__);
if(sensor->ops->read_len < 2) //sensor->ops->read_len = 1
{
printk("%s:lenth is error,len=%dn",__func__,sensor->ops->read_len);
return -1;
}
value = sensor_read_reg(client, STK_FLAG_REG);
if(value < 0)
{
printk("stk %s read STK_FLAG_REG, ret=%dn", __func__, value);
return value;
}
if(!(value & STK_FLG_PSDR_MASK))
return 0;
memset(buffer, 0, 2);
buffer[0] = sensor->ops->read_reg;
result = sensor_rx_data(client, buffer, sensor->ops->read_len);
if(result)
{
printk("%s:line=%d,errorn",__func__,__LINE__);
return result;
}
value = (buffer[0] << 8) | buffer[1];
if(value < 0) {
#ifdef STK_DEBUG_PRINTF
printk("stk %s: value == %d return n",__func__,value);
#endif
return result;
}
#ifdef STK_DEBUG_PRINTF
printk("stk %s: value == %d n",__func__,value);
#endif
#ifdef STK_TUNE0
if(ps_data->tune_zero_init_proc)
stk_tune_zero_get_ps_data(client, value);
else
stk_ps_tune_zero_func_fae(client, value);
#endif
stk_ps_report(client, value);
if (sensor->pdata->irq_enable && sensor->ops->int_status_reg) {
value = sensor_read_reg(client, sensor->ops->int_status_reg);
if (value & STK_FLAG_PSINT) {
value &= ~STK_FLAG_PSINT;
result = sensor_write_reg
(client, sensor->ops->int_status_reg,
value);
if (result) {
dev_err(&client->dev, "%s:write status reg errorn",
__func__);
return result;
}
}
}
return result;
}
struct sensor_operate proximity_stk3x1x_ops = {
.name = "ps_stk3x1x",
.type = SENSOR_TYPE_PROXIMITY, //sensor type and it should be correct
.id_i2c = PROXIMITY_ID_STK3X1X, //i2c id number
.read_reg = STK_DATA1_PS_REG, //read data
.read_len = 2, //data length
.id_reg = SENSOR_UNKNOW_DATA, //read device id from this register
.id_data = SENSOR_UNKNOW_DATA, //device id
.precision = 16, //16 bits
.ctrl_reg = STK_STATE_REG, //enable or disable
.int_status_reg = STK_FLAG_REG, //intterupt status register
.range = {0,1}, //range
.trig = IRQF_TRIGGER_LOW | IRQF_ONESHOT | IRQF_SHARED,
.active = proximity_sensor_active,
.init = proximity_sensor_init,
.report = proximity_sensor_report_value,
// int brightness[2];//backlight min_brightness max_brightness
// int int_ctrl_reg;
// int (*suspend)(struct i2c_client *client);
// int (*resume)(struct i2c_client *client);
// struct miscdevice *misc_dev;
};
/****************operate according to sensor chip:end************/
static int psensor_stk3x1x_probe(struct i2c_client *client,
const struct i2c_device_id *devid)
{
return sensor_register_device(client, NULL, devid, &proximity_stk3x1x_ops);
}
static int psensor_stk3x1x_remove(struct i2c_client *client)
{
return sensor_unregister_device(client, NULL, &proximity_stk3x1x_ops);
}
static const struct i2c_device_id psensor_stk3x1x_id[] = {
{"ps_stk3x1x", PROXIMITY_ID_STK3X1X},
{}
};
MODULE_DEVICE_TABLE(i2c, psensor_stk3x1x_id);
static struct i2c_driver psensor_stk3x1x_driver = {
.probe = psensor_stk3x1x_probe,
.remove = psensor_stk3x1x_remove,
.shutdown = sensor_shutdown,
.id_table = psensor_stk3x1x_id,
.driver = {
.name = "psensor_stk3x1x",
#ifdef CONFIG_PM
.pm = &sensor_pm_ops,
#endif
},
};
module_i2c_driver(psensor_stk3x1x_driver);
MODULE_AUTHOR("Lex Hsieh <lex_hsieh@sensortek.com.tw>");
MODULE_DESCRIPTION("Sensortek stk3x1x Proximity Sensor driver");
MODULE_LICENSE("GPL");
MODULE_VERSION(DRIVER_VERSION);
3、stk3x1x.h
/*
*
* $Id: stk3x1x.h
*
* Copyright (C) 2012~2013 Lex Hsieh <lex_hsieh@sensortek.com.tw>
*
* This file is subject to the terms and conditions of the GNU General Public
* License. See the file COPYING in the main directory of this archive for
* more details.
*
*/
#ifndef __STK3X1X_H__
#define __STK3X1X_H__
/* platform data */
struct stk3x1x_platform_data
{
uint8_t state_reg;
uint8_t psctrl_reg;
uint8_t alsctrl_reg;
uint8_t ledctrl_reg;
uint8_t wait_reg;
uint16_t ps_thd_h;
uint16_t ps_thd_l;
//int int_pin;
uint32_t transmittance;
uint16_t stk_max_min_diff;
uint16_t stk_lt_n_ct;
uint16_t stk_ht_n_ct;
};
#endif // __STK3X1X_H__
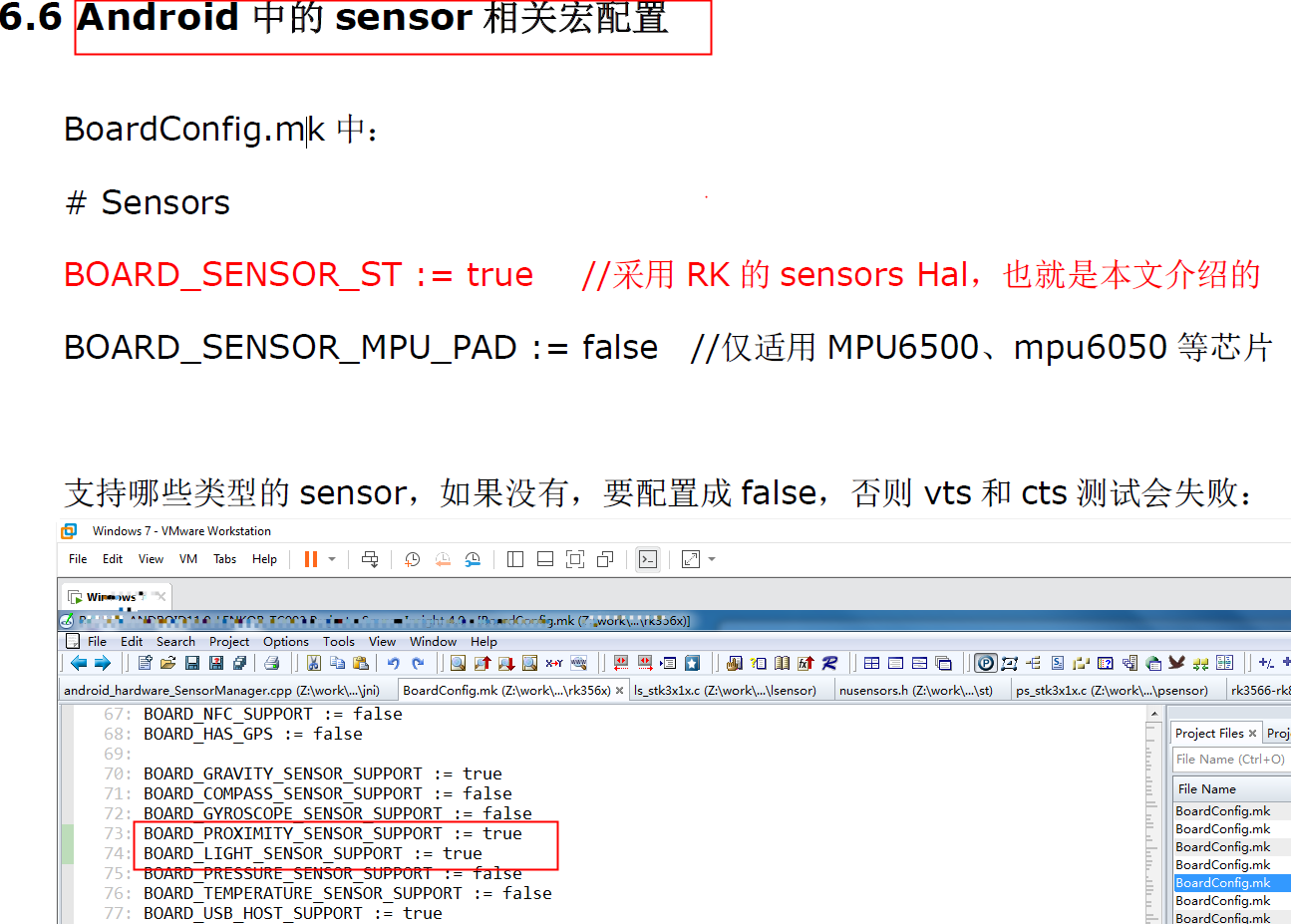
4、在device 添加两个宏,编译hardware下相关的代码。
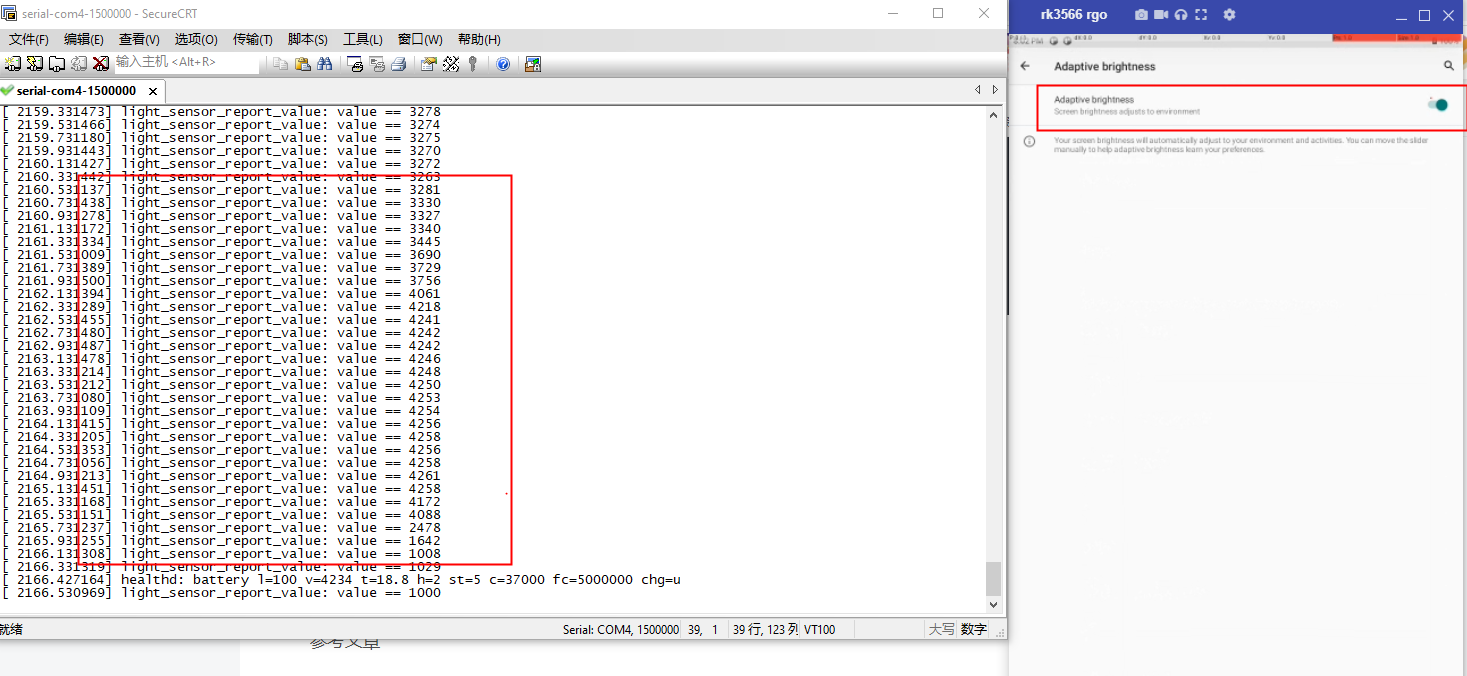
三、打开settings下面的自动调光选项,驱动会轮询环境光的亮度。
四、测试距离传感器。
1、需要搞个小app打开这个服务,app的代码。
package com.giada.proximity;
import androidx.appcompat.app.AppCompatActivity;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.os.PowerManager;
import android.util.Log;
public class MainActivity extends AppCompatActivity {
private Sensor sensor;
private SensorManager sm;
private SensorEventListener listener;
private String TAG = "TYPE_PROXIMITY";
private PowerManager localPowerManager = null;// 电源管理对象
private PowerManager.WakeLock localWakeLock = null;// 电源锁
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
sm=(SensorManager) getSystemService(Context.SENSOR_SERVICE);
sensor=sm.getDefaultSensor(Sensor.TYPE_PROXIMITY);
localPowerManager = (PowerManager) getSystemService(POWER_SERVICE);
listener=new SensorEventListener() {
@Override
public void onSensorChanged(SensorEvent event) {
// TODO Auto-generated method stub
//获得距离传感器中的数值,这里只有一个距离
float[] values = event.values;
Log.i(TAG,"onSensorChanged values[0]="+values[0]+" maxrange="+sensor.getMaximumRange());
if (values[0] == 0.0) {// 贴近手机
Log.d(TAG, "The object is near to sensor!");
} else {// 远离手机
Log.d(TAG, "The object is far to sensor!");
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// TODO Auto-generated method stub
Log.i(TAG,"onAccuracyChanged");
}
};
sm.registerListener(listener, sensor, SensorManager.SENSOR_DELAY_NORMAL);
}
}2、app界面,打开就可以了

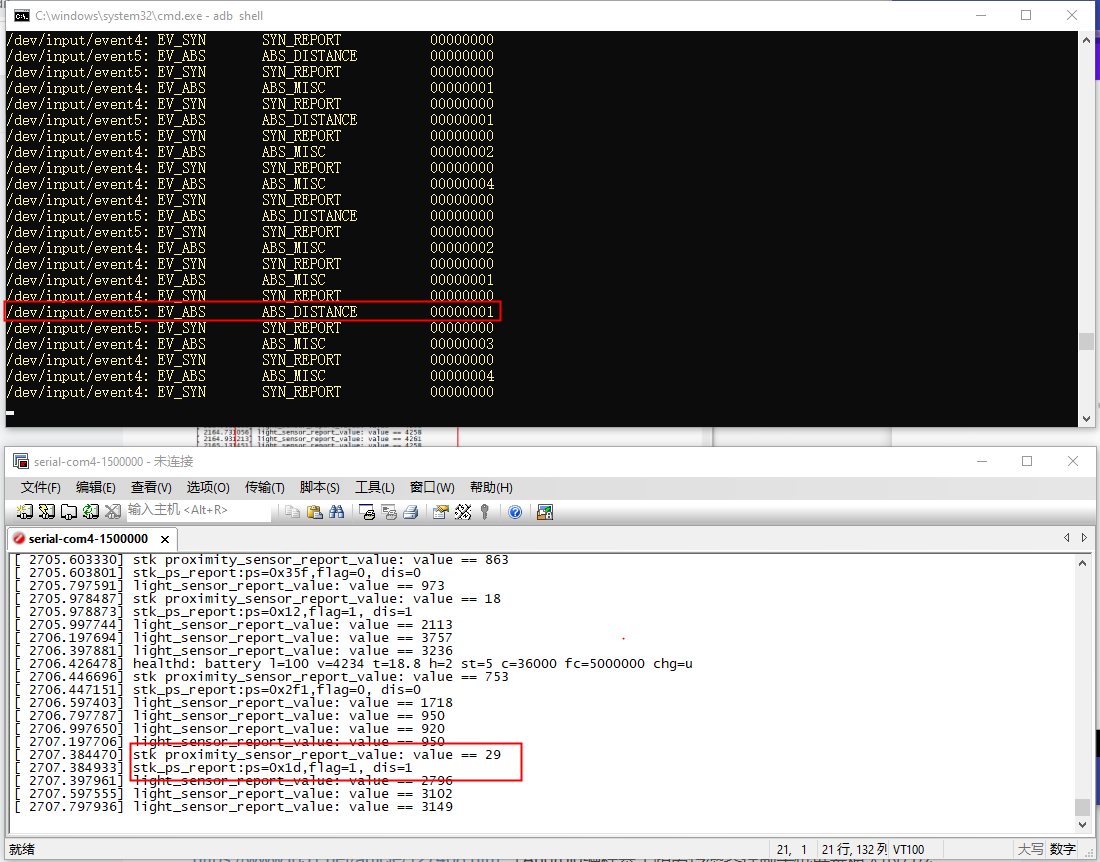
3、当有物体靠近和远离传感器的时候会产生中断,上层可以用getevent -l 看到上报的信息,有ABS_DISTANCE的信息,这个就是距离传感器上报上来的信息。
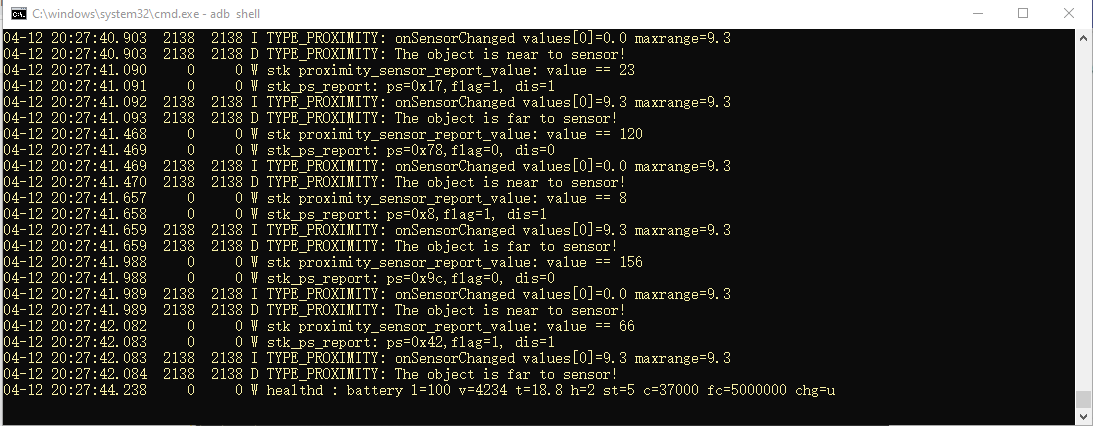
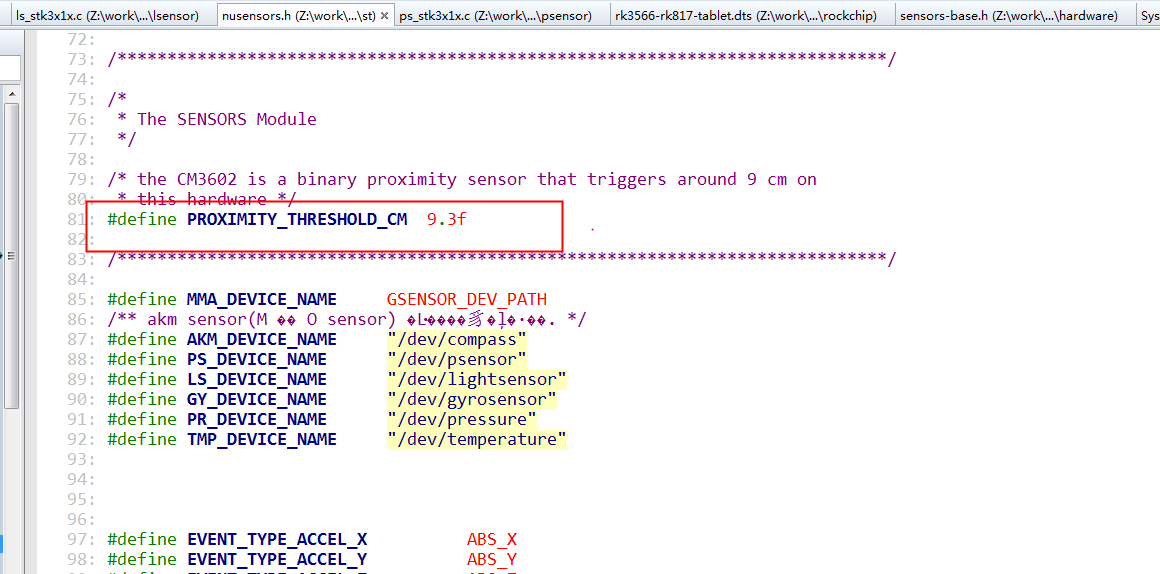
4、adb logcat看上层的log,物体接近的时候onSensorChanged values[0]=0.0,物体远离的时候onSensorChanged values[0]=9.3,有一个问题9.0这个数在哪里设置呢?答案是hardwarerockchipsensorstnusensors.h
五、参考文章
https://www.jb51.net/article/127408.htm (Android编程基于距离传感器控制手机屏幕熄灭的方法详解)
STK3311-X传感器调试_晓风凌殇的博客-CSDN博客_stk3311
Android——距离传感器(PROXIMITY)的应用_Li_peilun的博客-CSDN博客
最后
以上就是高贵画板最近收集整理的关于2022-04-13 Ambient Light & Proximity Sensor 光感和距离传感器 STK3311X调试记录 RK3566 Android11平台的全部内容,更多相关2022-04-13内容请搜索靠谱客的其他文章。








发表评论 取消回复