在万物互联-物联网的背景下,zigbee网络应用越加广泛,zigbee技术具有强大的组网能力,可以形成星型、树型和网状网3种结构,这三种网络结构各有优势,大家可以根据实际项目需要来选择合适的zigbee网络结构。下面亿佰特就为大家分享下ZigBee网络架构详解。

zigbee 作为一种短距离、低功耗、低数据传输速率的无线网络技术,它是介于无线标记技术和蓝牙之间的技术方案,在传感器网络等领域应用非常广泛,这得益于它强大的组网能力,可以形成星型、树型和网状网三种 zigbee 网络,可以根据实际项目需要来选择合适的 zigbee 网络结构,三种 zigbee 网络结构各有优势。
星形拓扑是最简单的一种拓扑形式,他包含一个 Co-ordinator(协调者)节点和一系列的 End Device(终端)节点。每一个 End Device 节点只能和 Co-ordinator 节点进行通讯。如果需要在两个 End Device 节点之间进行通讯必须通过 Co-ordinator 节点进行信息的转发。
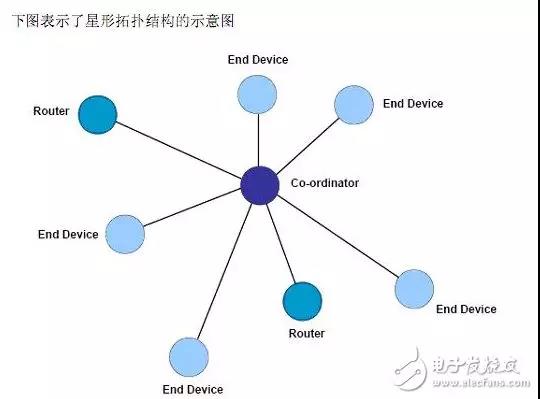
这种拓扑形式的缺点是节点之间的数据路由只有唯一的一个路径。Co-ordinator(协调者)有可能成为整个网络的瓶颈。实现星形网络拓扑不需要使用 zigbee 的网络层协议,因为本身 IEEE 802.15.4 的协议层就已经实现了星形拓扑形式,但是这需要开发者在应用层作更多的工作,包括自己处理信息的转发。
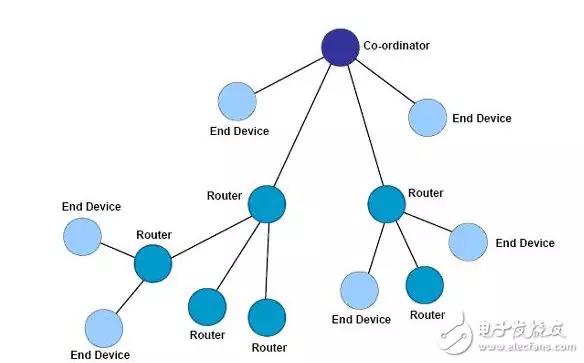
树形拓扑包括一个Co-ordinator(协调者)以及一系列的 Router(路由器)和 End Device(终端)节点。Co-ordinator 连接一系列的 Router 和 End Device, 他的子节点的 Router 也可以连接一系列的 Router 和 End Device. 这样可以重复多个层级。树形拓扑的结构如下图所示:
需要注意的是:
Co-ordinator 和 Router 节点可以包含自己的子节点。End Device 不能有自己的子节点。有同一个父节点的节点之间称为兄弟节点。有同一个祖父节点的节点之间称为堂兄弟节点
树形拓扑中的通讯规则:
每一个节点都只能和他的父节点和子节点之间通讯。如果需要从一个节点向另一个节点发送数据,那么信息将沿着树的路径向上传递到最近的祖先节点然后再向下传递到目标节点。这种拓扑方式的缺点就是信息只有唯一的路由通道。另外信息的路由是由协议栈层处理的,整个的路由过程对于应用层是完全透明的。
Mesh拓扑(网状拓扑) 包含一个 Co-ordinator 和一系列的 Router 和 End Device。这种网络拓扑形式和树形拓扑相同;请参考上面所提到的树形网络拓扑。但是,网状网络拓扑具有更加灵活的信息路由规则,在可能的情况下,路由节点之间可以直接的通讯。这种路由机制使得信息的通讯变得更有效率,而且意味着一旦一个路由路径出现了问题,信息可以自动的沿着其他的路由路径进行传输。网状拓扑的示意图如下所示:
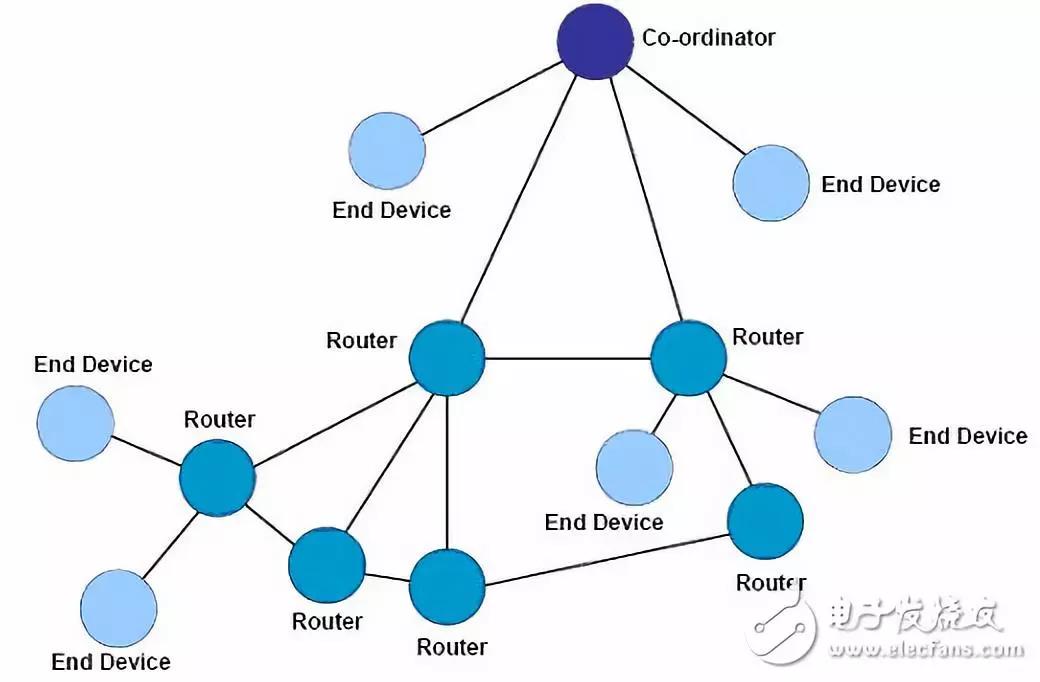
通常在支持网状网络的实现上,网络层会提供相应的路由探索功能,这一特性使得网络层可以找到信息传输的最优化的路径。需要注意的是,以上所提到的特性都是由网络层来实现,应用层不需要进行任何的参与。
MESH 网状网络拓扑结构的网络具有强大的功能,网络可以通过“多级跳”的方式来通信;该拓扑结构还可以组成极为复杂的网络;网络还具备自组织、自愈功能;星型和族树型网络适合点多多点、距离相对较近的应用。
最后
以上就是闪闪大叔最近收集整理的关于ZigBee网络架构详解的全部内容,更多相关ZigBee网络架构详解内容请搜索靠谱客的其他文章。








发表评论 取消回复