雷达一般在三维球坐标系当中测量目标的分布情况,分别对应着目标的距离、方位角和俯仰角;通过对其回波信号进行相应的信号处理就可以得到相应距离、多普勒和波达角。在对目标进行处理之前,首先要先对目标回波信号进行数字化处理。对于一个数字采集系统,采样率和量化位数的选择对雷达尤为重要,不仅影响着数据最后的存储量以及计算量,还影响着最后信号的信噪比等。
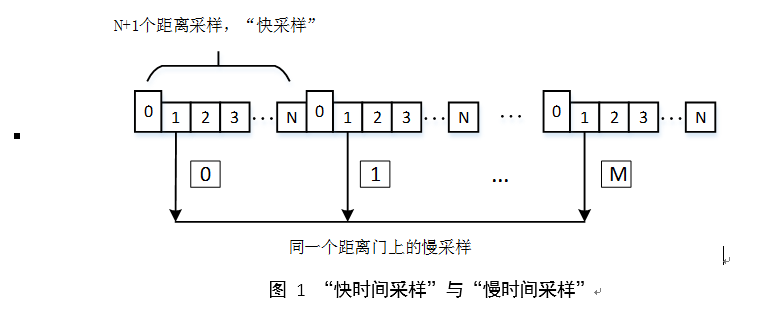
在雷达数据采集过程中,常常会有"快时间"和"慢时间"的描述,那该如何分别理解"快时间"和"慢时间"?如图1所示,图中距离维上点N+1个点存在数据存储器中,称之为 “快时间采样”,每个距离维的时间为脉冲重复时间(PRT);”慢时间采样”通常是用于脉冲串处理时,用于标记不同脉冲的“时间”,把一个脉冲看做是某种“慢时间”的一次采样,采集数据需要的时间为(M+1)*PRT,通常叫做相参处理时间(CPI)。
以上的“快时间采样”和“慢时间采样”属于在时域上进行采样,除此之外还有在空间上进行的采样,称为空间采样。假设在一个L+1个阵元的一维线阵中,对这L+1个阵元进行采样,再通过数字波束形成(DBF)处理就可以形成角度上的高分辨。空间采样也可以归为“慢时间采样”的一种。


最后
以上就是动听故事最近收集整理的关于雷达篇(九)雷达中的“快采样”和“慢采样”的全部内容,更多相关雷达篇(九)雷达中内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复