前些天发现了十分不错的人工智能学习网站,通俗易懂,风趣幽默,没有广告,分享给大家,大家可以自行看看。(点击跳转人工智能学习资料)
微信公众号:创享日记
发送关键词:计控六
获取无水印报告+simulink源文件
一、实验目的与要求
1、掌握大林算法的D(z)设计。
2、掌握SIMULINK的仿真方法。
二、仿真软硬件环境
PC机,MATLAB R2012b。
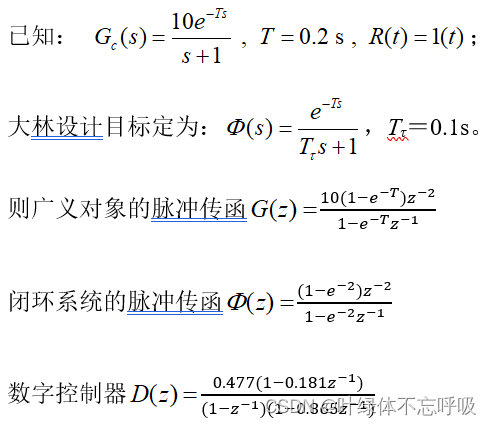
三、实验原理

四、D(z)设计
五、SIMULINK仿真结构图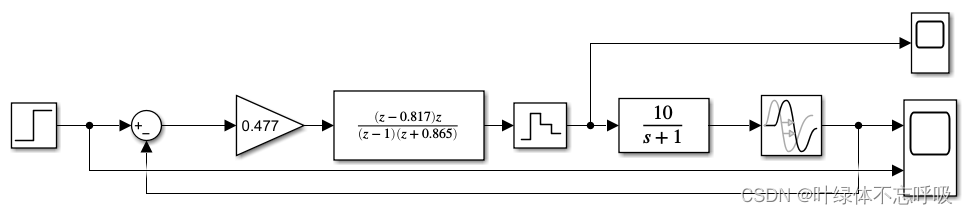
六、仿真波形记录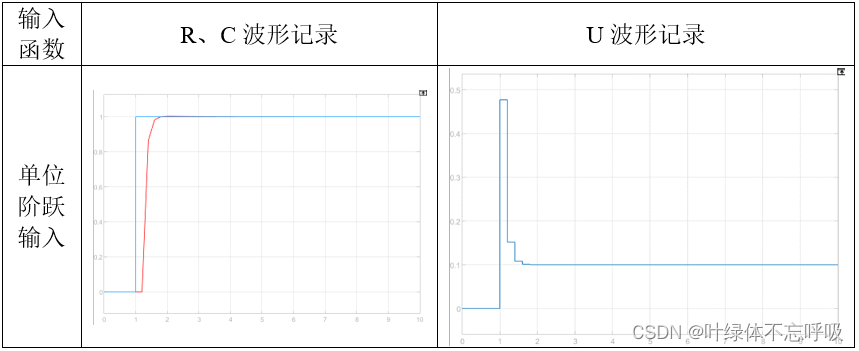
七、思考题
1、大林算法控制系统对阶跃输入有无超调?为什么?
答:达林算法控制系统对阶跃输入有超调。因为被控对象中的纯滯后部分仅将控制作用在时间坐标上推移了–个滞后时间,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而达林算法控制系统对阶跃信号也有一定的超调。
2、大林算法与PID算法有什么本质区别?
答:①达林算法:由于对象存在较大的纯滞后,采用单回路PID控制效果不佳。但常规单回路PID控制对一般对象控制效果较为理想,是生产过程中常用的一种控制方法。
②PID控制:比例控制能迅速反应误差,从而减小稳态误差。但是,比例控制能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分控制,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。但是积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。应用PID控制,必须适当地调整比例放大系数Kp,积分时间T1和微分时间Tp,使整个控制系统得到良好的性能。纯滞后控制部分的达林算法是基于离散系统的设计方法,按照期望的传递性能设计控制器达到改善性能的目的,PID控制算法是基于连续系统的设计方法。
最后
以上就是无心红酒最近收集整理的关于大林算法控制仿真实验(计控实验六simulink)的全部内容,更多相关大林算法控制仿真实验(计控实验六simulink)内容请搜索靠谱客的其他文章。








发表评论 取消回复