神经网络与深度学习作业6-XO识别
- 一、实现卷积-池化-激活
- 1. Numpy版本:手工实现 卷积-池化-激活
- 2. Pytorch版本:调用函数实现 卷积-池化-激活
- 3. 可视化:了解数字与图像之间的关系
- 二、 基于CNN的XO识别
- 1. 数据集
- 1.1 数据集展示:
- 1.2 划分训练集和测试集
- 2. 构建模型
- 3. 训练模型
- 4. 测试训练好的模型
- 5. 计算模型的准确率
- 6. 查看训练好的模型的特征图
- 7. 查看训练好的模型的卷积核
- 8. 训练模型源代码
- 9. 测试模型源代码
- 参考代码
- 总结
- References:
一、实现卷积-池化-激活
1. Numpy版本:手工实现 卷积-池化-激活
自定义卷积算子、池化算子实现,我们通过老师给的代码,添加注释,便于自己和别人理解。
代码如下:
import numpy as np
#初始化一张X图片矩阵
x = np.array([[-1, -1, -1, -1, -1, -1, -1, -1, -1],
[-1, 1, -1, -1, -1, -1, -1, 1, -1],
[-1, -1, 1, -1, -1, -1, 1, -1, -1],
[-1, -1, -1, 1, -1, 1, -1, -1, -1],
[-1, -1, -1, -1, 1, -1, -1, -1, -1],
[-1, -1, -1, 1, -1, 1, -1, -1, -1],
[-1, -1, 1, -1, -1, -1, 1, -1, -1],
[-1, 1, -1, -1, -1, -1, -1, 1, -1],
[-1, -1, -1, -1, -1, -1, -1, -1, -1]])
#输出原矩阵
print("x=n", x)
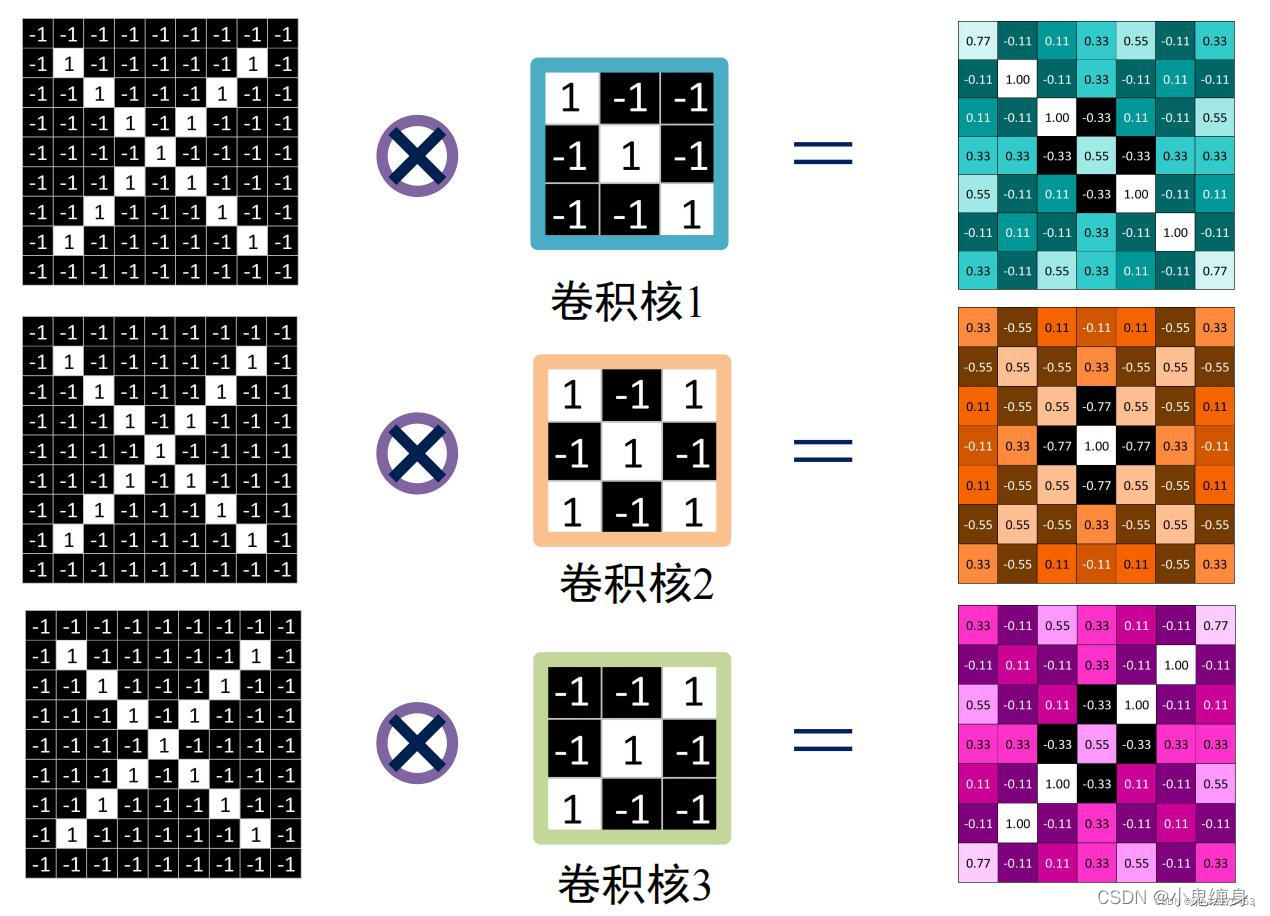
# 初始化 三个 卷积核
Kernel = [[0 for i in range(0, 3)] for j in range(0, 3)]
#参考图卷积核1
Kernel[0] = np.array([[1, -1, -1],
[-1, 1, -1],
[-1, -1, 1]])
#参考图卷积核2
Kernel[1] = np.array([[1, -1, 1],
[-1, 1, -1],
[1, -1, 1]])
#参考图卷积核3
Kernel[2] = np.array([[-1, -1, 1],
[-1, 1, -1],
[1, -1, -1]])
# --------------- 卷积 ---------------
stride = 1 # 步长
feature_map_h = 7 # 特征图的高
feature_map_w = 7 # 特征图的宽
feature_map = [0 for i in range(0, 3)] # 初始化3个特征图
for i in range(0, 3):
feature_map[i] = np.zeros((feature_map_h, feature_map_w)) # 初始化特征图
for h in range(feature_map_h): # 向下滑动,得到卷积后的固定行
for w in range(feature_map_w): # 向右滑动,得到卷积后的固定行的列
v_start = h * stride # 滑动窗口的起始行(高)
v_end = v_start + 3 # 滑动窗口的结束行(高)
h_start = w * stride # 滑动窗口的起始列(宽)
h_end = h_start + 3 # 滑动窗口的结束列(宽)
window = x[v_start:v_end, h_start:h_end] # 从图切出一个滑动窗口
for i in range(0, 3):
feature_map[i][h, w] = np.divide(np.sum(np.multiply(window, Kernel[i][:, :])), 9)
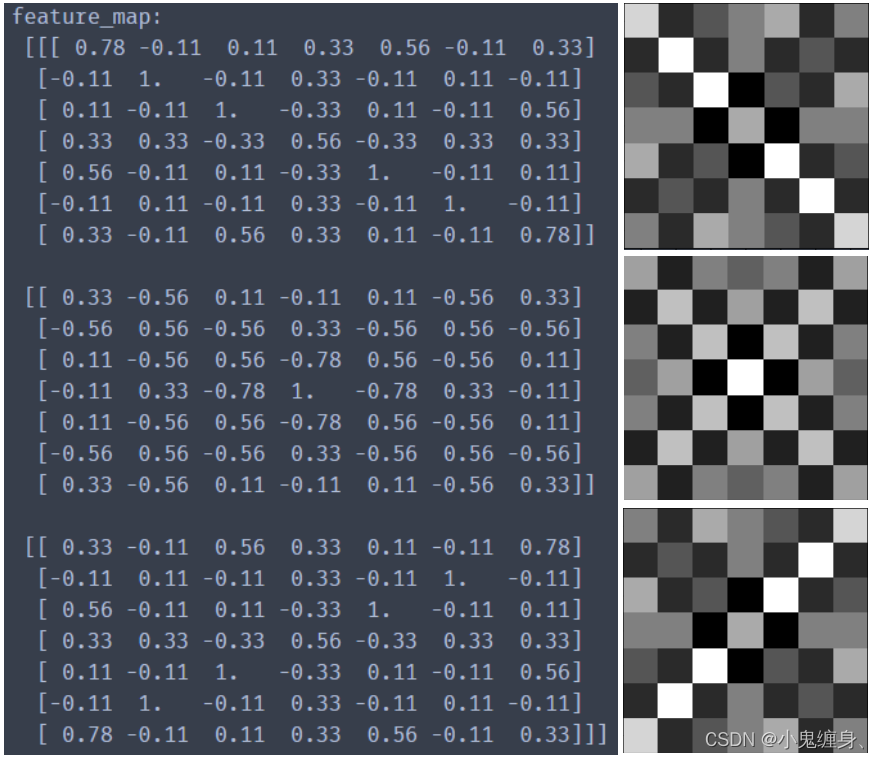
print("feature_map:n", np.around(feature_map, decimals=2))
# --------------- 池化 ---------------
pooling_stride = 2 # 步长
pooling_h = 4 # 特征图的高
pooling_w = 4 # 特征图的宽
feature_map_pad_0 = [[0 for i in range(0, 8)] for j in range(0, 8)]
for i in range(0, 3): # 特征图 补 0 ,行 列 都要加 1 (因为上一层是奇数,池化窗口用的偶数)
feature_map_pad_0[i] = np.pad(feature_map[i], ((0, 1), (0, 1)), 'constant', constant_values=(0, 0))
# print("feature_map_pad_0 0:n", np.around(feature_map_pad_0[0], decimals=2))
pooling = [0 for i in range(0, 3)]
for i in range(0, 3):
pooling[i] = np.zeros((pooling_h, pooling_w)) # 初始化特征图
for h in range(pooling_h): # 向下滑动,得到卷积后的固定行
for w in range(pooling_w): # 向右滑动,得到卷积后的固定行的列
v_start = h * pooling_stride # 滑动窗口的起始行(高)
v_end = v_start + 2 # 滑动窗口的结束行(高)
h_start = w * pooling_stride # 滑动窗口的起始列(宽)
h_end = h_start + 2 # 滑动窗口的结束列(宽)
for i in range(0, 3):
pooling[i][h, w] = np.max(feature_map_pad_0[i][v_start:v_end, h_start:h_end])
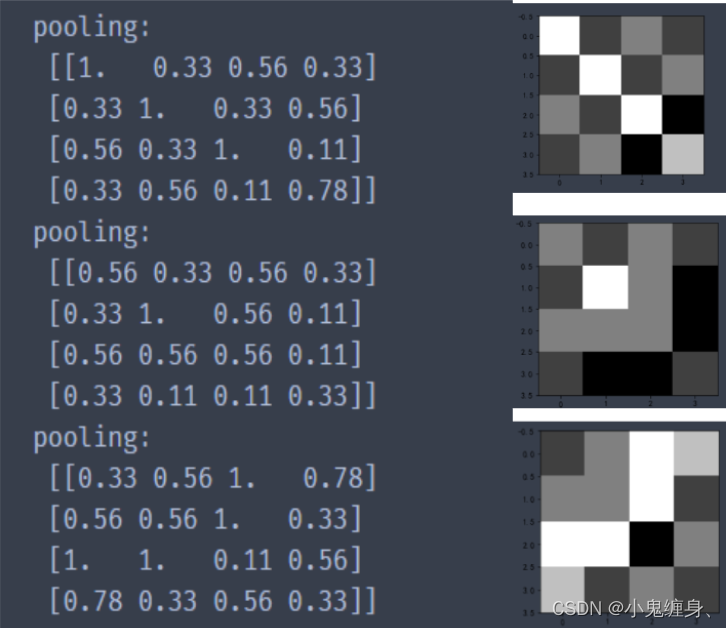
print("pooling:n", np.around(pooling[0], decimals=2))
print("pooling:n", np.around(pooling[1], decimals=2))
print("pooling:n", np.around(pooling[2], decimals=2))
# --------------- 激活 ---------------
def relu(x):
return (abs(x) + x) / 2
relu_map_h = 7 # 特征图的高
relu_map_w = 7 # 特征图的宽
relu_map = [0 for i in range(0, 3)] # 初始化3个特征图
for i in range(0, 3):
relu_map[i] = np.zeros((relu_map_h, relu_map_w)) # 初始化特征图
for i in range(0, 3):
relu_map[i] = relu(feature_map[i])
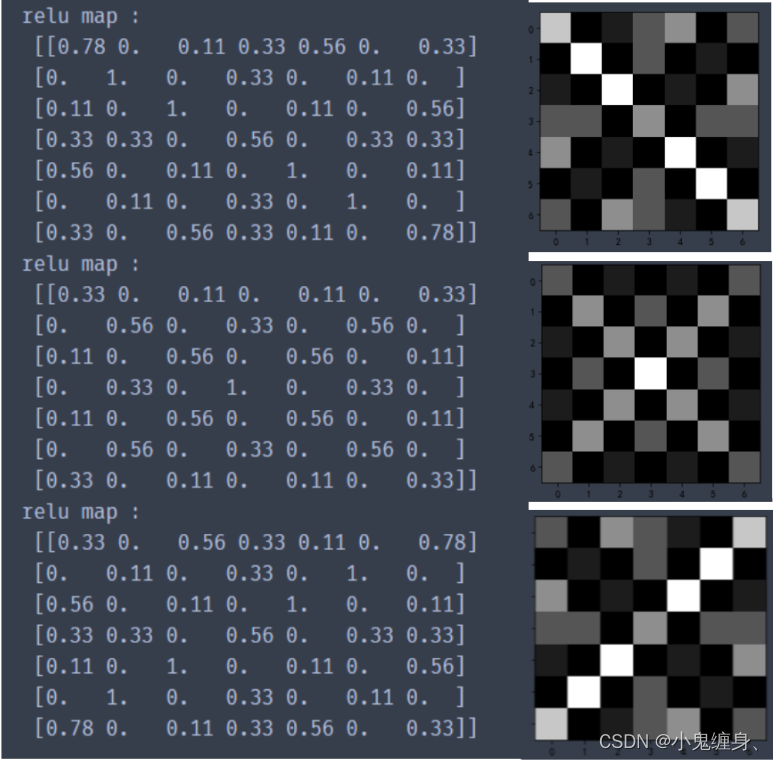
print("relu map :n",np.around(relu_map[0], decimals=2))
print("relu map :n",np.around(relu_map[1], decimals=2))
print("relu map :n",np.around(relu_map[2], decimals=2))
三个卷积核卷积结果:
三个池化层的结果:
激活层后三个特征图的结果:
2. Pytorch版本:调用函数实现 卷积-池化-激活
调用框架自带算子实现,对比自定义算子。
代码实现:
# https://blog.csdn.net/qq_26369907/article/details/88366147
# https://zhuanlan.zhihu.com/p/405242579
import numpy as np
import torch
import torch.nn as nn
x = torch.tensor([[[[-1, -1, -1, -1, -1, -1, -1, -1, -1],
[-1, 1, -1, -1, -1, -1, -1, 1, -1],
[-1, -1, 1, -1, -1, -1, 1, -1, -1],
[-1, -1, -1, 1, -1, 1, -1, -1, -1],
[-1, -1, -1, -1, 1, -1, -1, -1, -1],
[-1, -1, -1, 1, -1, 1, -1, -1, -1],
[-1, -1, 1, -1, -1, -1, 1, -1, -1],
[-1, 1, -1, -1, -1, -1, -1, 1, -1],
[-1, -1, -1, -1, -1, -1, -1, -1, -1]]]], dtype=torch.float)
print(x.shape)
print(x)
print("--------------- 卷积 ---------------")
conv1 = nn.Conv2d(1, 1, (3, 3), 1) # in_channel , out_channel , kennel_size , stride
conv1.weight.data = torch.Tensor([[[[1, -1, -1],
[-1, 1, -1],
[-1, -1, 1]]
]])
conv2 = nn.Conv2d(1, 1, (3, 3), 1) # in_channel , out_channel , kennel_size , stride
conv2.weight.data = torch.Tensor([[[[1, -1, 1],
[-1, 1, -1],
[1, -1, 1]]
]])
conv3 = nn.Conv2d(1, 1, (3, 3), 1) # in_channel , out_channel , kennel_size , stride
conv3.weight.data = torch.Tensor([[[[-1, -1, 1],
[-1, 1, -1],
[1, -1, -1]]
]])
feature_map1 = conv1(x)
feature_map2 = conv2(x)
feature_map3 = conv3(x)
print(feature_map1 / 9)
print(feature_map2 / 9)
print(feature_map3 / 9)
# img = torch.tensor(feature_map3).data.squeeze().numpy() # 将输出转换为图片的格式
# plt.imshow(img, cmap='gray')
print("--------------- 池化 ---------------")
max_pool = nn.MaxPool2d(2, padding=0, stride=2) # Pooling
zeroPad = nn.ZeroPad2d(padding=(0, 1, 0, 1)) # pad 0 , Left Right Up Down
feature_map_pad_0_1 = zeroPad(feature_map1)
feature_pool_1 = max_pool(feature_map_pad_0_1)
feature_map_pad_0_2 = zeroPad(feature_map2)
feature_pool_2 = max_pool(feature_map_pad_0_2)
feature_map_pad_0_3 = zeroPad(feature_map3)
feature_pool_3 = max_pool(feature_map_pad_0_3)
print(feature_pool_1.size())
print(feature_pool_1 / 9)
print(feature_pool_2 / 9)
print(feature_pool_3 / 9)
print("--------------- 激活 ---------------")
activation_function = nn.ReLU()
feature_relu1 = activation_function(feature_map1)
feature_relu2 = activation_function(feature_map2)
feature_relu3 = activation_function(feature_map3)
print(feature_relu1 / 9)
print(feature_relu2 / 9)
print(feature_relu3 / 9)
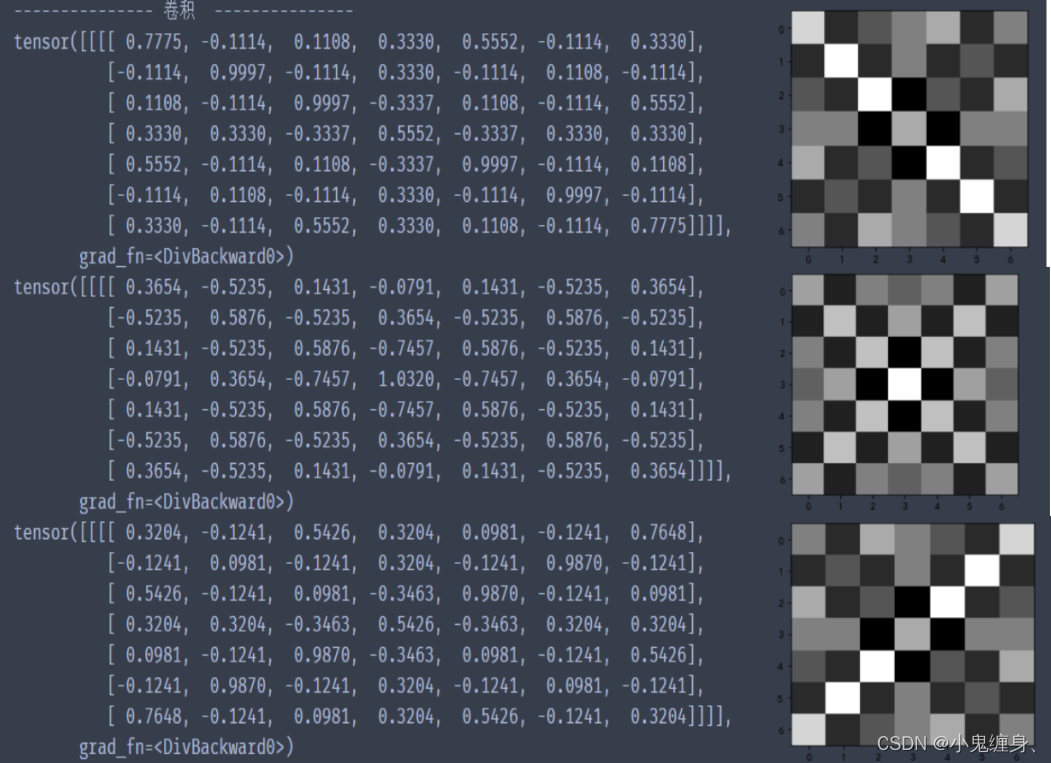
三层卷积结果:
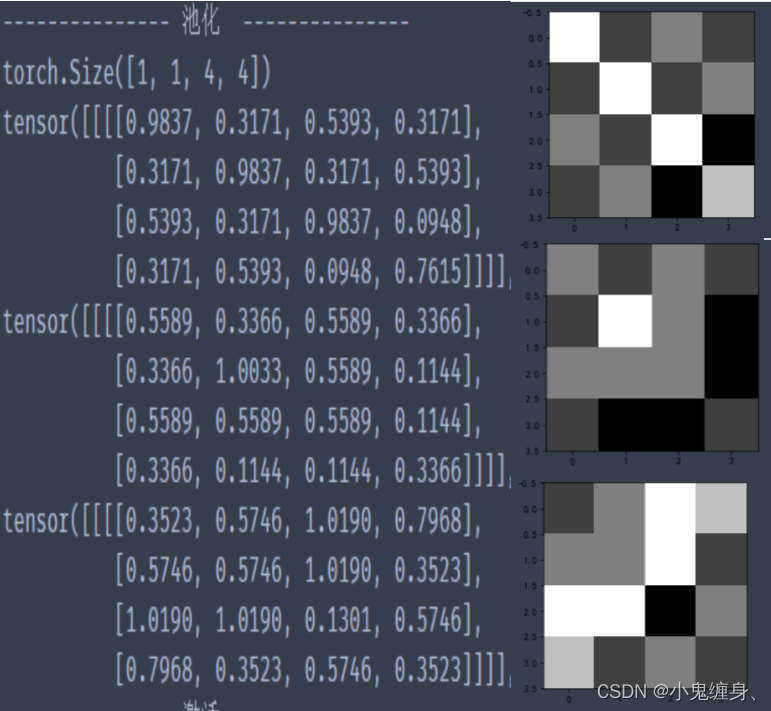
池化后的结果:
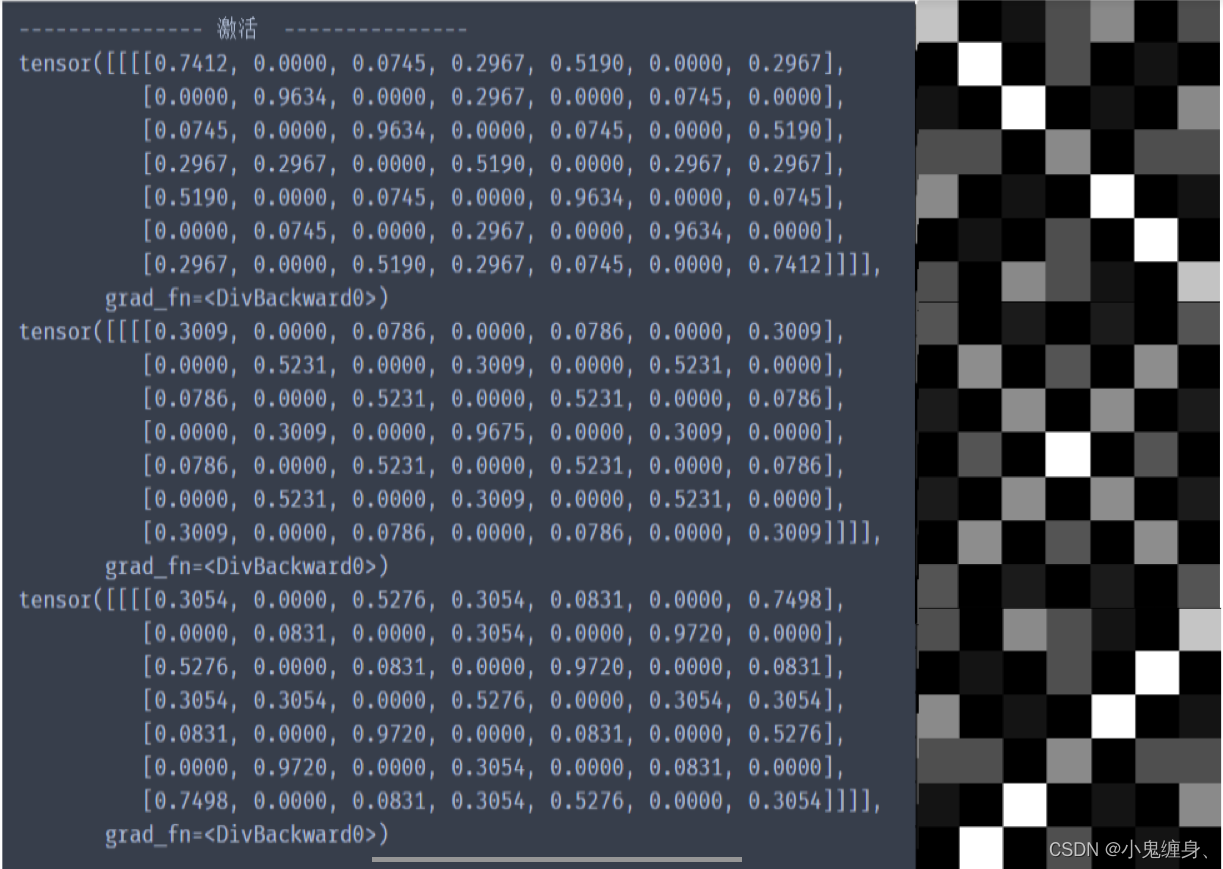
激活层之后:
对比自定义算子
卷积层对比,发现两者基本没有区别。
池化层对比,两者基本上并无差别。
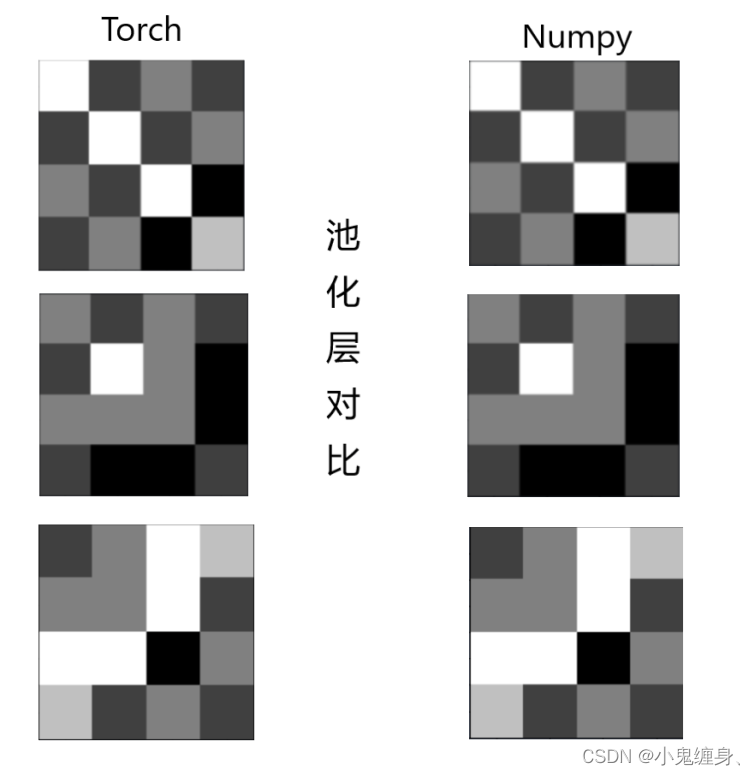
激活层对比:
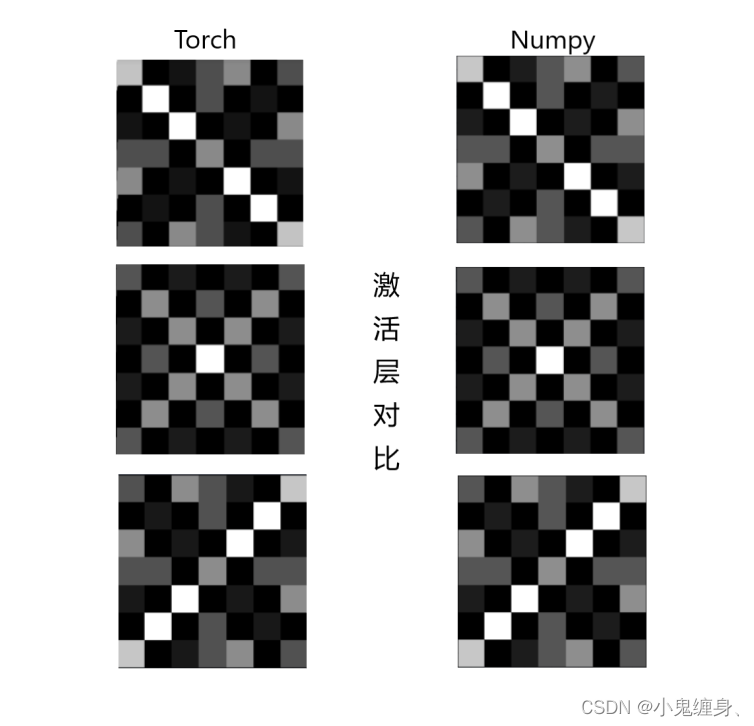
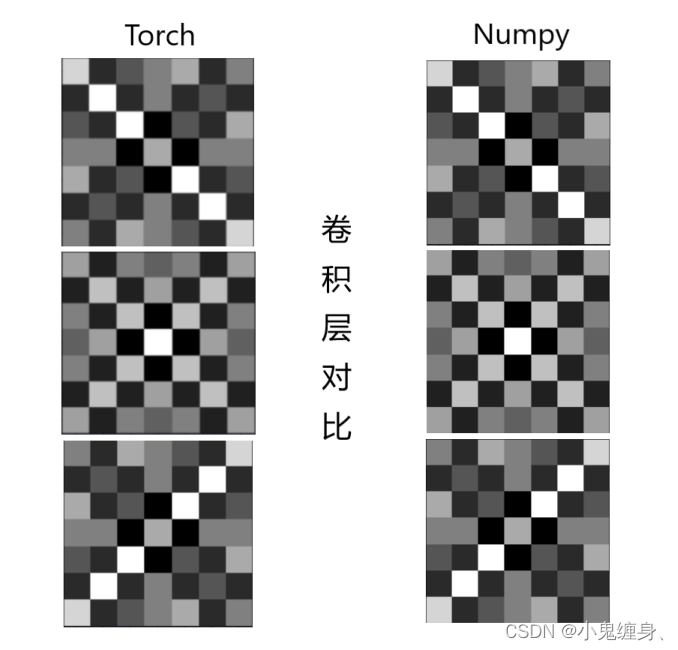
结果:
可见,在可视化两者对比上,torch和numpy并无差别,但是对于自定义算子和torch相比,Torch的输出相对于自定义算子来说表现的更加精确。
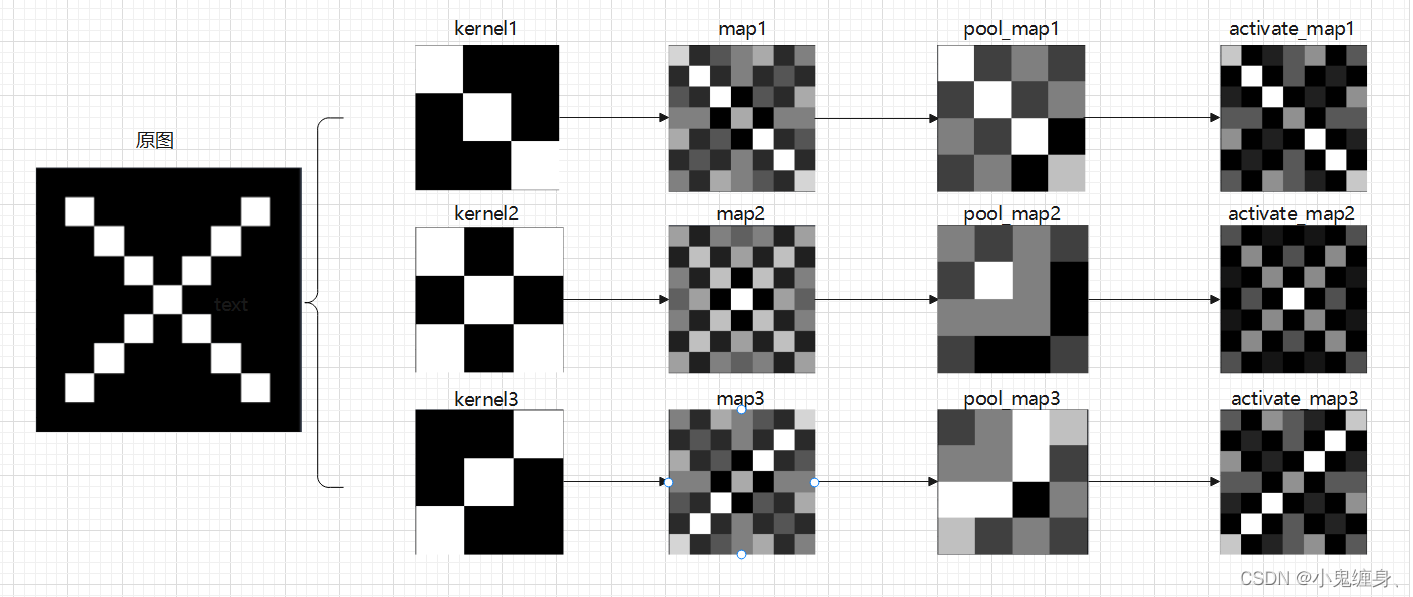
3. 可视化:了解数字与图像之间的关系
可视化卷积核和特征图。
制图如下:
二、 基于CNN的XO识别
1. 数据集
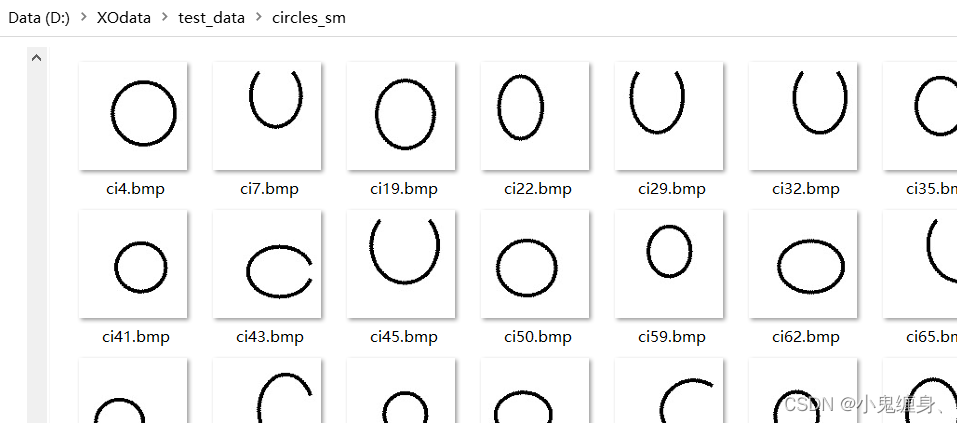
1.1 数据集展示:
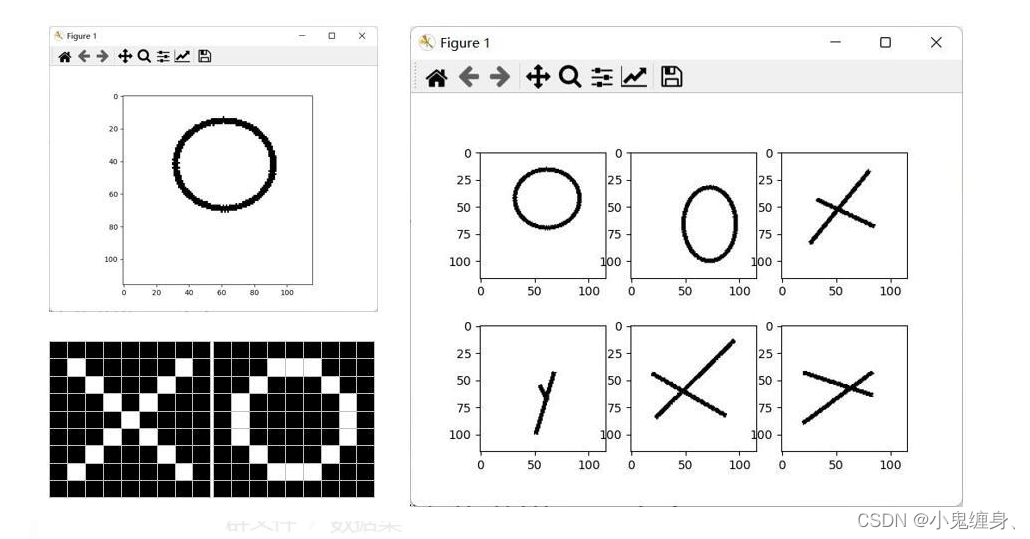
'O’数据集:
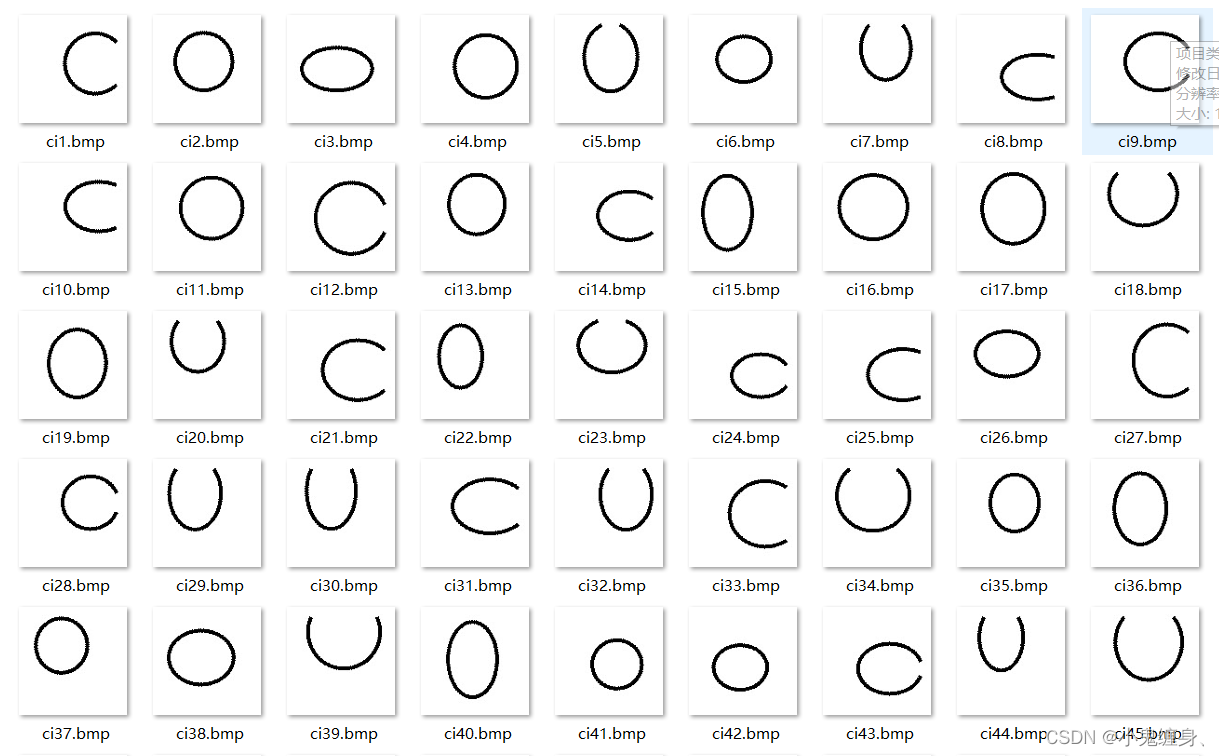
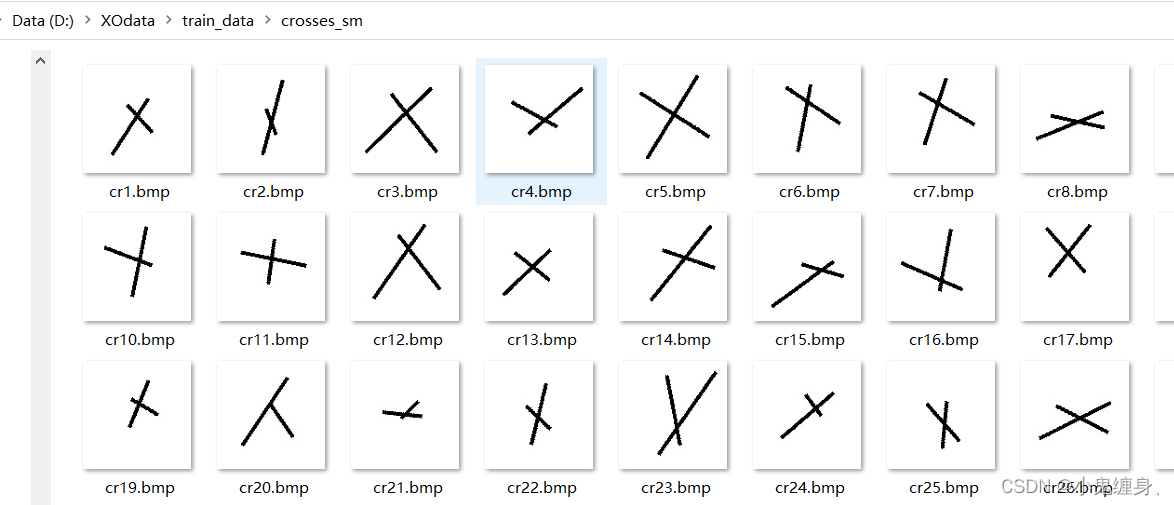
'X’数据集:

1.2 划分训练集和测试集

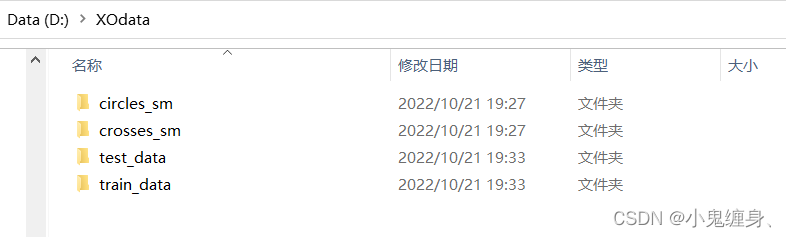
如何将这两个文件夹分为训练集和测试集呢?我将这两个文件夹放在了:D:XOdata中,用代码分隔开来。
共2000张图片,X、O各1000张。
从X、O文件夹,这里我们取出200作为测试集。
文件夹D:XOdatatrain_data:放置训练集 1600张图片
文件夹D:XOdatatest_data: 放置测试集 400张图片
分离训练集和测试集代码如下:
#
import os
import random
import shutil
from shutil import copy2
datadir_normal = "D:\XOdata\crosses_sm"
all_data = os.listdir(datadir_normal) # (图片文件夹)
num_all_data = len(all_data)
print("num_all_data: " + str(num_all_data))
index_list = list(range(num_all_data))
random.shuffle(index_list)
num = 0
trainDir = "D:\XOdata\train_data\crosses_sm" # (将训练集放在这个文件夹下)
if not os.path.exists(trainDir):
os.makedirs(trainDir)
testDir = "D:\XOdata\test_data\crosses_sm" # (将测试集放在这个文件夹下)
if not os.path.exists(testDir):
os.makedirs(testDir)
for i in index_list:
fileName = os.path.join(datadir_normal, all_data[i])
if num < num_all_data * 0.8:
copy2(fileName, trainDir)
else:
copy2(fileName, testDir)
num += 1
print(len(trainDir))
print(len(testDir))
分离结果:
2. 构建模型
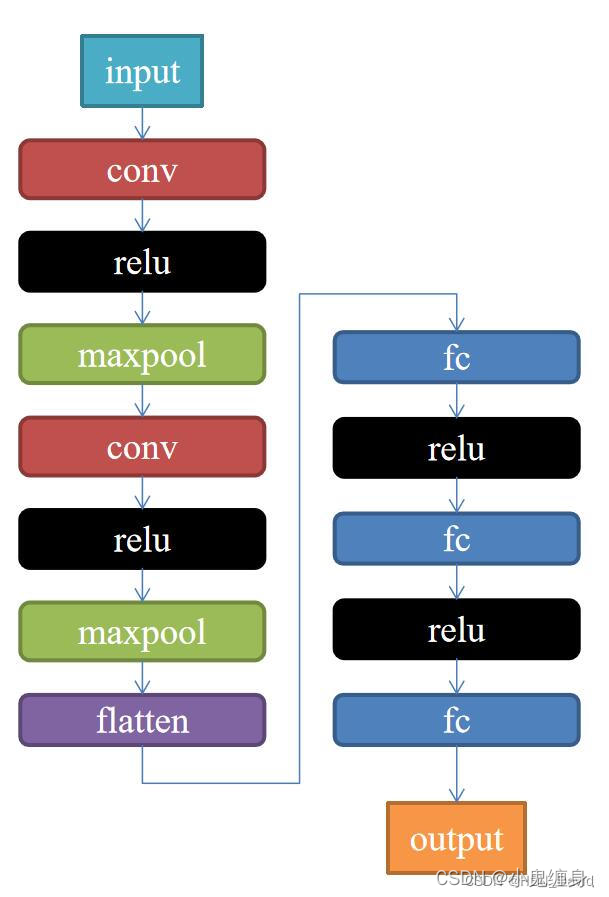
下面我们根据上图构建网络,代码如下:
import torch.nn as nn
import torch
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3)
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200)
self.fc2 = nn.Linear(1200, 64)
self.fc3 = nn.Linear(64, 2)
def forward(self, x):
x = self.maxpool(self.relu(self.conv1(x)))
x = self.maxpool(self.relu(self.conv2(x)))
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x
3. 训练模型
import torch
from torchvision import transforms, datasets
import torch.nn as nn
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import torch.optim as optim
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
path = r'D:XOdatatrain_data'
path_test = r'D:XOdatatest_data'
data_train = datasets.ImageFolder(path, transform=transforms)
data_test = datasets.ImageFolder(path_test, transform=transforms)
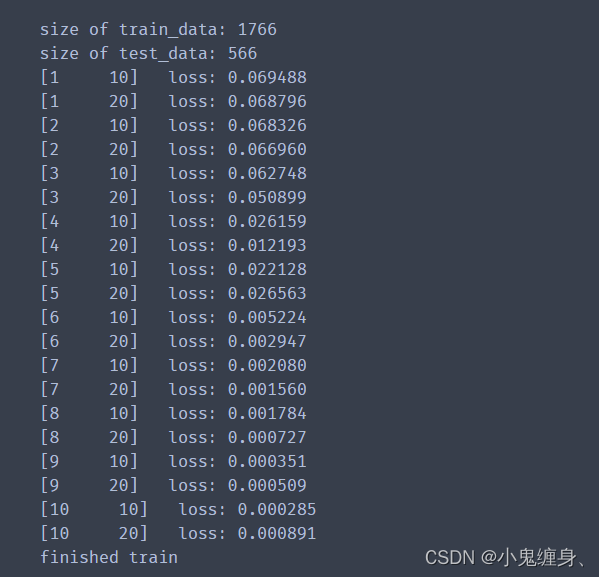
print("size of train_data:",len(data_train))
print("size of test_data:",len(data_test))
data_loader = DataLoader(data_train, batch_size=64, shuffle=True)
data_loader_test = DataLoader(data_test, batch_size=64, shuffle=True)
model = Net()
criterion = torch.nn.CrossEntropyLoss() # 损失函数 交叉熵损失函数
optimizer = torch.optim.SGD(model.parameters(), lr=0.1) # 优化函数:随机梯度下降
epochs = 10
for epoch in range(epochs):
running_loss = 0.0
for i, data in enumerate(data_loader):
images, label = data
out = model(images)
loss = criterion(out, label)
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.item()
if (i + 1) % 10 == 0:
print('[%d %5d] loss: %.6f' % (epoch + 1, i + 1, running_loss / 100))
running_loss = 0.0
print('finished train')
# 保存模型
torch.save(model, 'model_name.pth') # 保存的是模型, 不止是w和b权重值
训练结果:
4. 测试训练好的模型
# 读取模型
model_load = torch.load('model_name.pth')
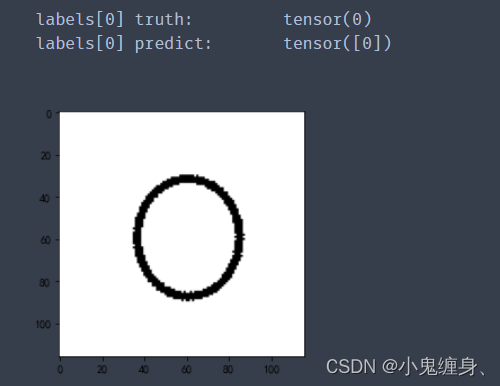
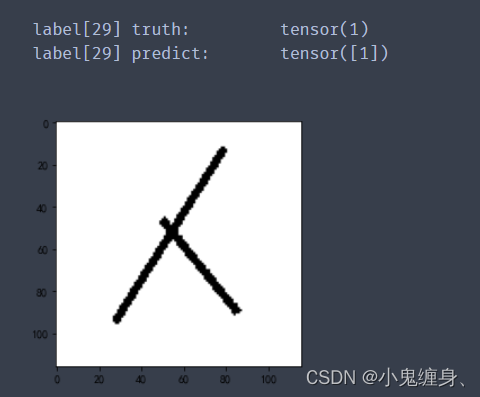
# 读取一张图片 images[0],测试
print("label[0] truth:t", label[0])
x = images[0]
x = x.reshape([1,1,116,116])
predicted = torch.max(model_load(x), 1)
print("label[0] predict:t", predicted.indices)
img = images[0].data.squeeze().numpy() # 将输出转换为图片的格式
plt.imshow(img, cmap='gray')
plt.show()
测试结果:
5. 计算模型的准确率
# 读取模型
model_load = Net()
model_load.load_state_dict(torch.load('model_name.pth'))
correct = 0
total = 0
with torch.no_grad(): # 进行评测的时候网络不更新梯度
for data in data_loader_test: # 读取测试集
images, labels = data
outputs = model_load(images)
_, predicted = torch.max(outputs.data, 1) # 取出 最大值的索引 作为 分类结果
total += labels.size(0) # labels 的长度
correct += (predicted == labels).sum().item() # 预测正确的数目
print('Accuracy of the network on the test images: %f %%' % (100. * correct / total))
准确率:

Accuracy of the network on the test images: 100.000000 %
6. 查看训练好的模型的特征图
代码:
# 看看每层的 卷积核 长相,特征图 长相
# 获取网络结构的特征矩阵并可视化
import torch
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
from torchvision import transforms, datasets
import torch.nn as nn
from torch.utils.data import DataLoader
# 定义图像预处理过程(要与网络模型训练过程中的预处理过程一致)
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
path = r'D:XOdatatrain_data'
data_train = datasets.ImageFolder(path, transform=transforms)
data_loader = DataLoader(data_train, batch_size=64, shuffle=True)
for i, data in enumerate(data_loader):
images, labels = data
print(images.shape)
print(labels.shape)
break
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200) # full connect 1
self.fc2 = nn.Linear(1200, 64) # full connect 2
self.fc3 = nn.Linear(64, 2) # full connect 3
def forward(self, x):
outputs = []
x = self.conv1(x)
outputs.append(x)
x = self.relu(x)
outputs.append(x)
x = self.maxpool(x)
outputs.append(x)
x = self.conv2(x)
x = self.relu(x)
x = self.maxpool(x)
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return outputs
# create model
model1 = Net()
# load model weights加载预训练权重
# model_weight_path ="./AlexNet.pth"
model_weight_path = "model_name.pth"
model1.load_state_dict(torch.load(model_weight_path))
# 打印出模型的结构
print(model1)
x = images[0]
x = x.reshape([1,1,116,116])
# forward正向传播过程
out_put = model1(x)
for feature_map in out_put:
# [N, C, H, W] -> [C, H, W] 维度变换
im = np.squeeze(feature_map.detach().numpy())
# [C, H, W] -> [H, W, C]
im = np.transpose(im, [1, 2, 0])
print(im.shape)
# show 9 feature maps
plt.figure()
for i in range(9):
ax = plt.subplot(3, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
# [H, W, C]
# 特征矩阵每一个channel对应的是一个二维的特征矩阵,就像灰度图像一样,channel=1
# plt.imshow(im[:, :, i])
plt.imshow(im[:, :, i], cmap='gray')
plt.show()
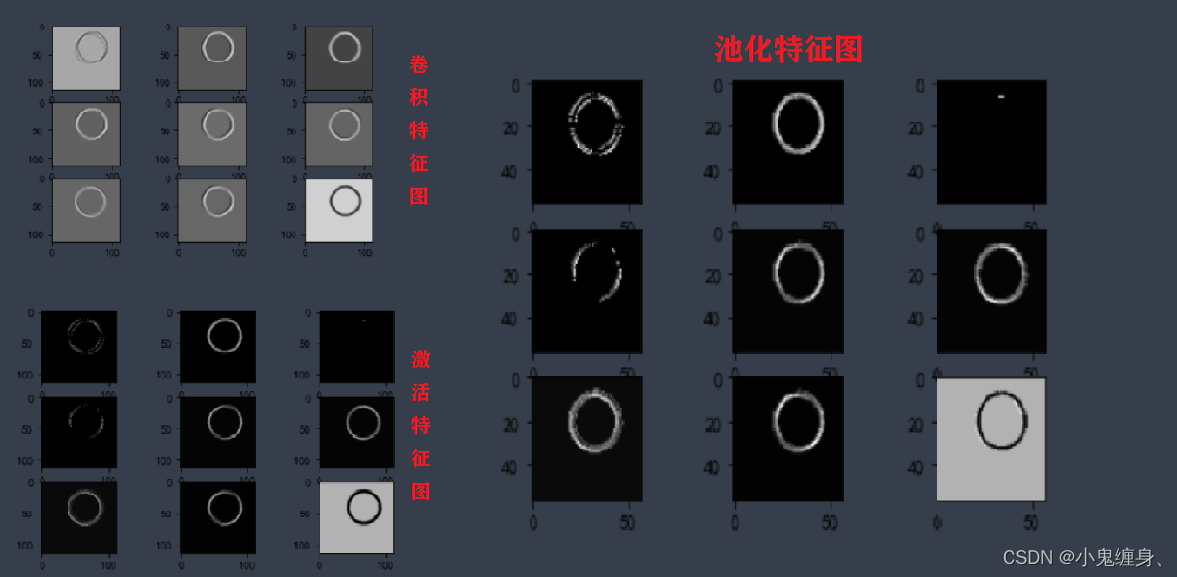
输出结果:
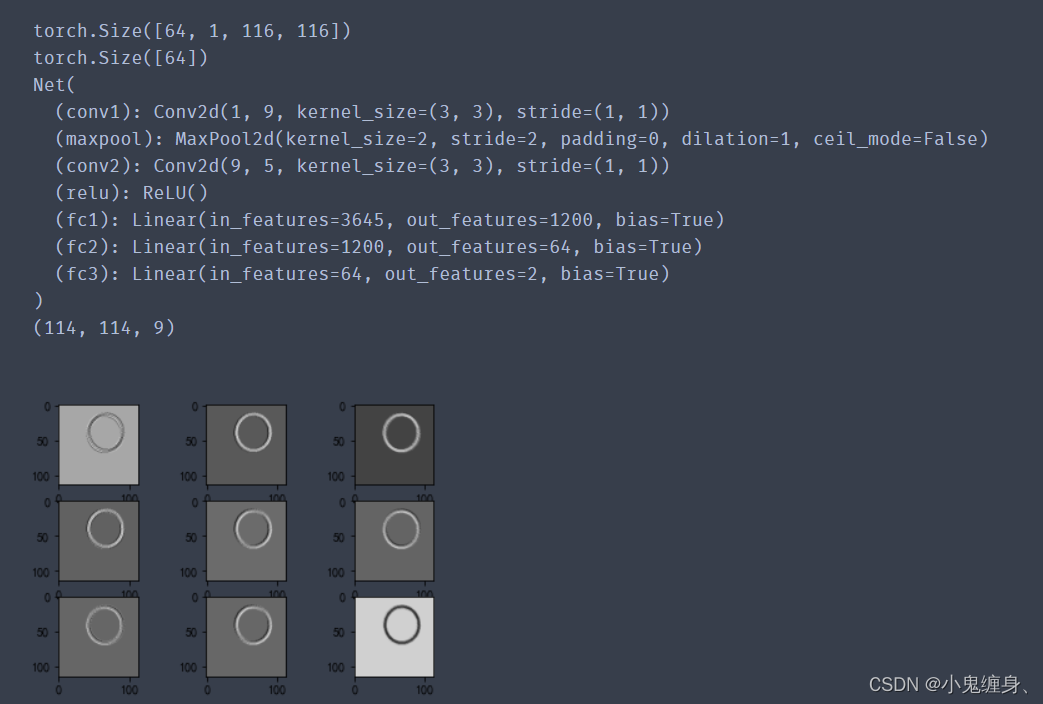
查看训练好的模型的特征图:
7. 查看训练好的模型的卷积核
# 看看每层的 卷积核 长相,特征图 长相
# 获取网络结构的特征矩阵并可视化
import torch
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
from torchvision import transforms, datasets
import torch.nn as nn
from torch.utils.data import DataLoader
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号 #有中文出现的情况,需要u'内容
# 定义图像预处理过程(要与网络模型训练过程中的预处理过程一致)
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
path = r'D:XOdatatrain_data'
data_train = datasets.ImageFolder(path, transform=transforms)
data_loader = DataLoader(data_train, batch_size=64, shuffle=True)
for i, data in enumerate(data_loader):
images, labels = data
# print(images.shape)
# print(labels.shape)
break
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200) # full connect 1
self.fc2 = nn.Linear(1200, 64) # full connect 2
self.fc3 = nn.Linear(64, 2) # full connect 3
def forward(self, x):
outputs = []
x = self.maxpool(self.relu(self.conv1(x)))
# outputs.append(x)
x = self.maxpool(self.relu(self.conv2(x)))
outputs.append(x)
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return outputs
# create model
model1 = Net()
# load model weights加载预训练权重
model_weight_path = "model_name.pth"
model1.load_state_dict(torch.load(model_weight_path))
x = images[0]
x = x.reshape([1,1,116,116])
# forward正向传播过程
out_put = model1(x)
weights_keys = model1.state_dict().keys()
for key in weights_keys:
print("key :", key)
# 卷积核通道排列顺序 [kernel_number, kernel_channel, kernel_height, kernel_width]
if key == "conv1.weight":
weight_t = model1.state_dict()[key].numpy()
print("weight_t.shape", weight_t.shape)
k = weight_t[:, 0, :, :] # 获取第一个卷积核的信息参数
# show 9 kernel ,1 channel
plt.figure()
for i in range(9):
ax = plt.subplot(3, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
plt.imshow(k[i, :, :], cmap='gray')
title_name = 'kernel' + str(i) + ',channel1'
plt.title(title_name)
plt.show()
if key == "conv2.weight":
weight_t = model1.state_dict()[key].numpy()
print("weight_t.shape", weight_t.shape)
k = weight_t[:, :, :, :] # 获取第一个卷积核的信息参数
print(k.shape)
print(k)
plt.figure()
for c in range(9):
channel = k[:, c, :, :]
for i in range(5):
ax = plt.subplot(2, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
plt.imshow(channel[i, :, :], cmap='gray')
title_name = 'kernel' + str(i) + ',channel' + str(c)
plt.title(title_name)
plt.show()
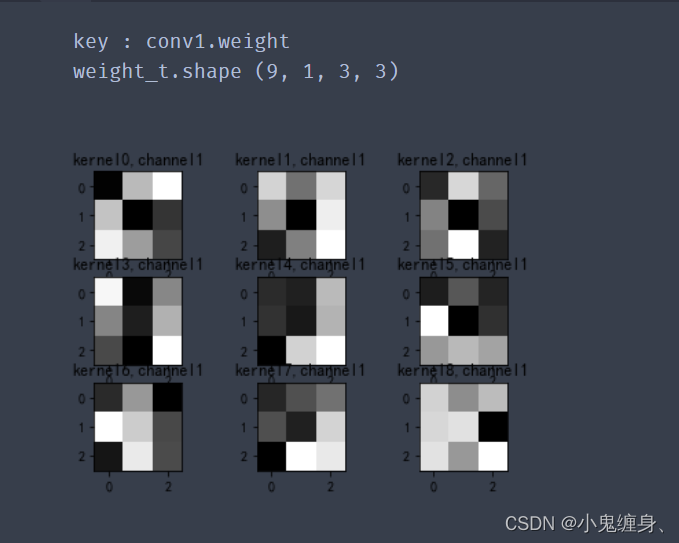
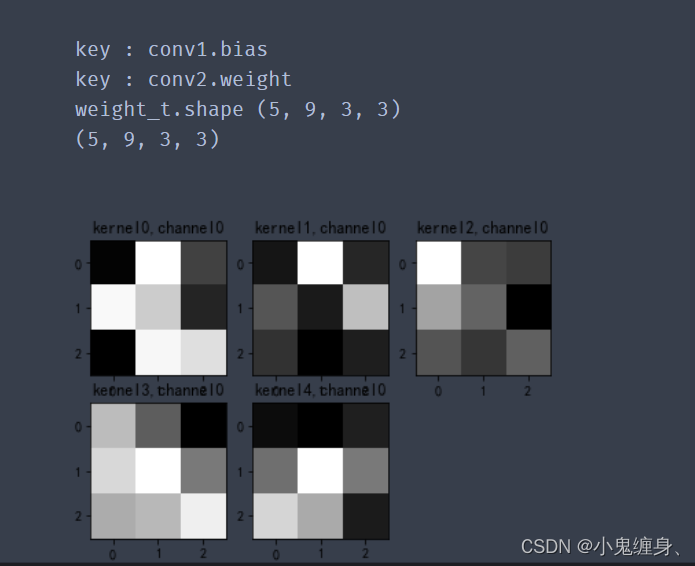
输出结果:
下图中的九个图片是第一轮9个(单通道)的卷积核,CNN的卷积核是模型自己训练得到的,不需要人工干预,类似于FNN中的权值w,通过反向传播,梯度下降不断更新。
第二层卷积:
8. 训练模型源代码
# https://blog.csdn.net/qq_53345829/article/details/124308515
import torch
from torchvision import transforms, datasets
import torch.nn as nn
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import torch.optim as optim
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
path = r'D:XOdatatrain_data'
path_test = r'D:XOdatatest_data'
data_train = datasets.ImageFolder(path, transform=transforms)
data_test = datasets.ImageFolder(path_test, transform=transforms)
print("size of train_data:",len(data_train))
print("size of test_data:",len(data_test))
data_loader = DataLoader(data_train, batch_size=64, shuffle=True)
data_loader_test = DataLoader(data_test, batch_size=64, shuffle=True)
for i, data in enumerate(data_loader):
images, labels = data
print(images.shape)
print(labels.shape)
break
for i, data in enumerate(data_loader_test):
images, labels = data
print(images.shape)
print(labels.shape)
break
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200) # full connect 1
self.fc2 = nn.Linear(1200, 64) # full connect 2
self.fc3 = nn.Linear(64, 2) # full connect 3
def forward(self, x):
x = self.maxpool(self.relu(self.conv1(x)))
x = self.maxpool(self.relu(self.conv2(x)))
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x
model = Net()
criterion = torch.nn.CrossEntropyLoss() # 损失函数 交叉熵损失函数
optimizer = optim.SGD(model.parameters(), lr=0.1) # 优化函数:随机梯度下降
epochs = 10
for epoch in range(epochs):
running_loss = 0.0
for i, data in enumerate(data_loader):
images, label = data
out = model(images)
loss = criterion(out, label)
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.item()
if (i + 1) % 10 == 0:
print('[%d %5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 100))
running_loss = 0.0
print('finished train')
# 保存模型 torch.save(model.state_dict(), model_path)
torch.save(model.state_dict(), 'model_name1.pth') # 保存的是模型, 不止是w和b权重值
# 读取模型
model = torch.load('model_name1.pth')
9. 测试模型源代码
# https://blog.csdn.net/qq_53345829/article/details/124308515
import torch
from torchvision import transforms, datasets
import torch.nn as nn
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import torch.optim as optim
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
path = r'D:XOdatatrain_data'
path_test = r'D:XOdatatest_data'
data_train = datasets.ImageFolder(path, transform=transforms)
data_test = datasets.ImageFolder(path_test, transform=transforms)
print("size of train_data:", len(data_train))
print("size of test_data:", len(data_test))
data_loader = DataLoader(data_train, batch_size=64, shuffle=True)
data_loader_test = DataLoader(data_test, batch_size=64, shuffle=True)
print(len(data_loader))
print(len(data_loader_test))
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200) # full connect 1
self.fc2 = nn.Linear(1200, 64) # full connect 2
self.fc3 = nn.Linear(64, 2) # full connect 3
def forward(self, x):
x = self.maxpool(self.relu(self.conv1(x)))
x = self.maxpool(self.relu(self.conv2(x)))
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x
# 读取模型
model = Net()
model.load_state_dict(torch.load('model_name1.pth', map_location='cpu')) # 导入网络的参数
# model_load = torch.load('model_name1.pth')
# https://blog.csdn.net/qq_41360787/article/details/104332706
correct = 0
total = 0
with torch.no_grad(): # 进行评测的时候网络不更新梯度
for data in data_loader_test: # 读取测试集
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, 1) # 取出 最大值的索引 作为 分类结果
total += labels.size(0) # labels 的长度
correct += (predicted == labels).sum().item() # 预测正确的数目
print('Accuracy of the network on the test images: %f %%' % (100. * correct / total))
# "_," 的解释 https://blog.csdn.net/weixin_48249563/article/details/111387501
参考代码
【2021-2022 春学期】人工智能-作业6:CNN实现XO识别
总结
这次呢,我们实现了一个简单的图片数据集的识别,中间提取并可视化了一些个训练过程,对于其过程训练中的内容更加清楚,感觉还是要跑一下大规模的数据集,但是我尝试了一下那个mnist,感觉mnist六万张图片也不是特别大啊,显示图片就给我卡的要死,可能是自己的电脑配置太拉了,我要吐槽一下,不用说跑大数据集了,就连画图3D粘上去五六张图片就能给我卡死,等到有更好的配置再做一下大的数据集吧。最后就是,这次作业emmm确实挺好的,我也画了好多图来让自己更好的理解和对比,也方便大家理解和比较,如果有错的地方,希望给我指出来,谢谢了,hhhhhha。
References:
解决pytorch加载模型报错TypeError: ‘collections.OrderedDict‘ object is not callable
Markdown (CSDN) MD编辑器(二)- 文本样式(更改字体、字体大小、字体颜色、加粗、斜体、高亮、删除线)
将一个文件夹图片分成训练集和测试集
附上魏老师的博客(关注一下,学的更好):
NNDL 作业6:基于CNN的XO识别
最后
以上就是温柔睫毛最近收集整理的关于神经网络与深度学习作业6-XO识别一、实现卷积-池化-激活二、 基于CNN的XO识别总结References:的全部内容,更多相关神经网络与深度学习作业6-XO识别一、实现卷积-池化-激活二、内容请搜索靠谱客的其他文章。

![while[0 -gt 0]: 未找到命令_TensorFlow 2.0 简明指南](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)






发表评论 取消回复