一、连续系统 VS 离散系统
1、定义
连续系统:系统状态的改变在时间上是连续的。
离散系统:系统状态的改变只发生在某些时间点上。
simpowersystem 的库中基本所有模型都属于连续系统,因为其对应的物理世界一般是电机、电源、电力电子器件等等,而simpowersystem 中常用 powergui 这个工具来将系统中的连续模型离散化以便采用 discrete 算法,便于计算机计算。
二、.连续模型的数学建模 vs 离散模型的数学建模
所谓数学建模就是用什么样的数学语言来描述模型。
连续系统的数学模型通常可以用以下几种形式表示:
- 微分方程;
- 传递函数;
- 状态空间表达式;
. 这三种形式是可以相互转换的,其中又以状态空间表达式最有利于计算机计算
①微分方程
一个连续系统可以表示成高阶微分方程,即:
②传递函数
上式两边取拉普拉斯变换,假设 y 及 u 的各阶导数 (包括零阶 )的初值均为零,则有: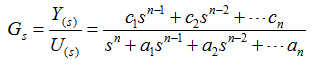
③状态空间表达式
线性定常系统的状态空间表达式包括下列两个矩阵方程: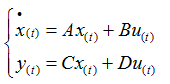
离散系统的数学模型通常有,1、差分方程 2、离散传递函数 3、权序列 4、离散状态空间模型等形式表示。
①差分方程的一般表示形式
同样差分方程可以转换成后面那些表达形式。
三、.连续模型的离散化
为什么要将一个连续模型离散化呢?
主要是从系统的数学模型来考虑的, 前者是用微分方程来建模的, 而后者是用差分方程来建模的, 并且差分方程更适合计算机计算, 并且前者的仿真算法(simulationsolver )用的是数值积分的方法,而后者则是采用差分方程的状态更新离散算法。
如何由一个连续模型得到它的离散模型,以及 powergui 是通过什么方法将连续模型离散化的,即
simulator 是如何将微分方程转换成差分方程的。
假设连续系统的状态方程为: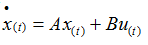
现在人为地在系统的输入及输出端加上采样开关,同时为了使输入信号复员为原来的信
号,在输入端还要加一个保持器,如图所示。 现假定它为零阶保持器, 即假定输入向量的所
有分量在任意两个依次相连的采样瞬时为常值, 比如, 对第 n 个采样周期 u(t)=u(nt) , 其中 T
为采样间隔。
由采样定理可知,当采样频率 ws 和信号最大频率 wmax 满足 ws>2wmax 的条件时,可由
采样后的信号唯一地确定原始信号。 把采样后的离散信号通过一个低通滤波器, 即可实现信
号的重构。值得注意的是,图所示的采样器和保持器实际上是不存在的,而是为了将式离
散化而虚构的。
通过拉斯变换求解再反拉斯变换和卷积,就可以得到一个带有采样时间T的差分方程;只要涉及到离散就一定有采样时间。
四. simulator 连续模型的仿真算法(仿真解算器)和步长的概念。
连续系统的计算机仿真算法是数值积分法, 即计算机用数值积分来解微分方程, 从而得到其
近似解。具体方法如下:
上式右端的积分是计算机无法求出的,其几何意义为曲线 f(t,y) 在区间 (ti ,ti+1) 上的面积。
当(ti ,ti+1) 充分小时,可用矩形面积来近似代替:
其中 h 即为积分步长。
当然求解连续系统的计算机仿真算法有好多种。
五、 simulator 离散模型的仿真算法和步长的概念。
离散模型的数学建模一般采用差分方程的方式, 在 matlab 中其仿真算法是采用 discrete 算法,就是根据 simulation step 定时对离散模块进行更新(就是定时计算差分方程的意思)。
至于其步长的概念和连续模型中 h 的概念差不多,但是它的大小选择和 sample time 有着密
切关系,下面会给予说明。
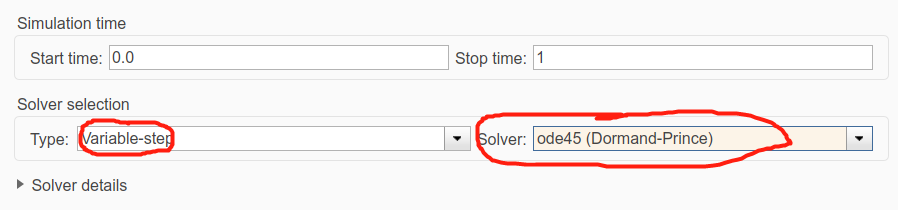
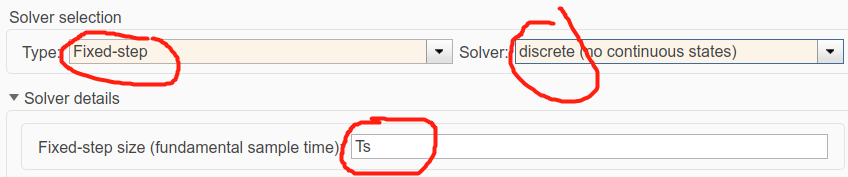
六、simulink 中仿真参数设置
continuous solver 就是数值积分法, discrete solver 就是离散解法。()
关于步长:
步长有 variable step(变步长)和 fixed step (固定步长之分) 。
continuous solver 中的步长就是 h,就是积分时间间隔。
对于 discrete solver 的步长是和要仿真的模型中的 sample time 有密切关系的,是不可以随便取的。
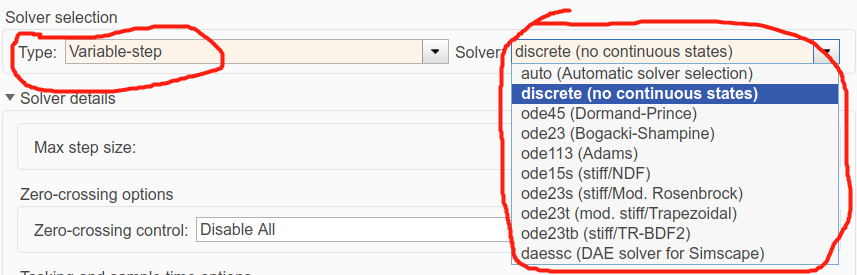
solver(ODE 表示常微分方法)
①variable step(变步长)
变步长会根据模型状态的变化的快慢适当调节步长,也就是相邻仿真计算的时间间隔,这样在保证了一定精度的同时又减少了仿真的次数,从而减小了仿真时间。对于 continuous solver 而言,可以人为设定 max step size 和 min step size ,然后计算机自动选择积分步长 h 进行数值积分。
②fixed step (固定步长)
仿真从头到尾用同一个步长。 Note: 对于 continuous solver 而言固定步长可以认为任
取;而对于 dicretesolver 而言固定步长可以 auto(即仿真帮你取) ,若人为取必选要遵守和
sample time 之间的一定关系,下面会有介绍。
③discretesolver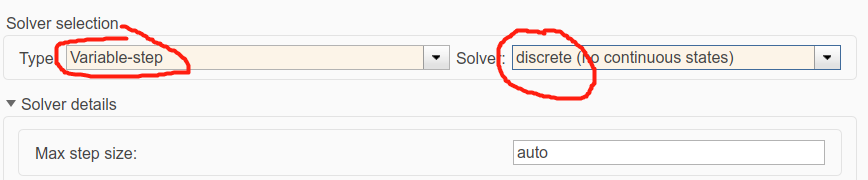
solver就是 discrete 算法,就是不断更新 discrete block 在各离散点的状态,步长的大小是与模型中的 sampletime 有密切关系的,由上面阐述的差分方程可知,差分方程中 T 采样时间是固定的,对discrete solver 而言不管是 variable step 还是 fixed step, simulation step (仿真步)必须要有出现在 sample time 所有的整数倍上,即 simulation step 的设置必须使 simulator 在 1T、 2T、 3T 要对模型进行计算
仿真,以免错过主要状态的转化。
若一个离散仿真模型中具有多个 sample time,那么要保证每个模型在其采用时间的 1T、
2T、 3T 都能进行仿真,那么最小步长只能取各个仿真时间的公约数,其中最大公约数又称
为 fundamental sample time,例子如下
假设仿真的离散模型中有两个采样时间 T1=2e-6 , T2=4e-6 那么其公约数为 1e-6 和 2e-6,而
fundamental sample time=2e-6。
若采用 variable step 步长, simulator 会根据模型中的各个 sample time 自动调整步长, 以使得
仿真时间时刻等于 sample time。
④关于 powergui 的作用
simulink仿真用到simpowersystom(模拟系统)库时,一般都要加powergui模块,它储存了电路模型的等效数学模型(状态空间方程),有三种运行模式:连续方法(continous)、离散方法(discrete)、相量方法(phasor)。
powergui 基本上在 simpowersystem 的仿真中有两个作用:
作用一:离散化系统中的一些连续(模拟)模型,以便 simulator 采用 discrete 算法计算。
注意:对本来就已经存在的离散模型不起任何作用,其设置的采样时间只对仿真中的模拟系统部分起作用,如果设置了固定步长值,其采样时间也要是固定步长的整数倍。
作用二:提供各种 graphical userinterface tools 用于分析仿真过程中的信号以及数据 (尤其是 FFT
分析)
最后
以上就是老迟到手机最近收集整理的关于Simulink 中连续与离散模型的区别的全部内容,更多相关Simulink内容请搜索靠谱客的其他文章。








发表评论 取消回复