文章目录
- 动态过程微分方程描述
- ode45 求解方法
- 拉氏变换与控制系统模型
- 数学模型的描述
- 传递函数模型
- 零极点形式的数学模型
- 状态空间模型
- Matlab / Simulink 在模型中的应用
- 多项式处理相关的函数
- 多项式乘法函数
- 多项式求根函数
- 由根创建多项式函数
- 求多项式在给定点的值函数
- 建立传递函数相关的函数
- 建立零极点形式的数学模型相关函数
- 建立状态空间模型相关函数
- simulink 中的控制系统模型表示
- simulink 中模型与状态空间模型的转化
- 应用实例
- 系统模型转换及连接
- 模型转换
- 模型连接
- 串联连接
- 并联连接
- 反馈连接
- 闭环连接
- 模型连接的 Matlab 实现
- 非线性数学模型的线性化
- 综合实例及matlab/simulink应用
本文参阅《Matlab/Simulink与控制系统仿真》一书,做一些笔记,帮助自己学习。
系统的数学模型 ----> 系统的仿真处理 —> 设计一个合适的控制器,使系统响应到预期效果
线性系统中,常见的线性模型有:
传递函数模型
状态方程模型
零极点增益模型
部分分式模型等
动态过程微分方程描述
微分方程是控制系统模型的基础
动态微分方程描述的是被控制量与给定量或扰动量之间的函数关系,给定量和扰动量可以看成 系统的输入量,被控制量看成输出量。
建立微分方程的时候,一般从系统的环节着手,先确定各环节的输入量和输出量,以确定其工作状态,并建立各环节的微分方程,而后消去中间变量,最后得到系统的动态微分方程
对于比较复杂的系统,建立系统微分方程一般可采用以下步骤:
- 将系统划分为多个环节,确定各环节的输入和输出信号,每个环节可考虑写一个方程
- 根据物理定律或通过实验等方法得出的物理规律,列出各环节的原始方程式,并考虑适当简化、线性化
- 将各环节方程式联立,消去中间变量,最后得出只包含输入变量、输出变量以及参量的系统方程式。
若已知输入量以及变量的初始条件,对微分方程进行求解,就可以得到系统输出量的表达式,并由此对系统进行性能分析。
Matlab 提供了 ode23 、ode45 等微分方程的数值解法函数,不仅适用于线性定常系统,也适用于 非线性和时变系统。
%%
课本 P73 页代码
%%
clear
% 清除工作空间的变量
t0 = 0; tfinal = 10;
% 响应时间
x0 = [0.2; 0];
% 初始化,电感电流为0,电容电压为 0.2V
%%
[t0 tfinal] 求解区间, X0是初始值
[t, x]=ode45('rlcsys', [t0 tfinal], x0);
% rlcsys 是系统微分方程的描述函数
%%
figure(1);
subplot(211); plot(t,x(:,1));
grid;
% 绘制状态响应图并添加栅格
title('电容电压/V');
xlabel('时间/s')
subplot(212);
plot(t,x(:,2));
grid;
% 绘制状态响应图并添加栅格
title('电感电流/A');
xlabel('时间/s')
%%
figure(2);
vc =x(:,1);
i = x(:,2);
plot(vc, i); grid;
title('电感电流与电容电压的关系曲线/A');
xlabel('电容电压/V')
ylabel('电感电流/A')
function xdot = rlcsys(t,x)
Vs = 1.5; R = 1.6; L = 2.1; C=0.30;
xdot = [x(2)/C; 1/L*(Vs - x(1) - R * x(2))];
end
ode45 求解方法
ode45 求解非刚性微分方程 - 中阶方法
[t,y] = ode45(odefun,tspan,y0)
其中 tspan = [t0 tf] 求微分方程组 y ′ = f ( t , y ) y' = f(t, y) y′=f(t,y) 从 t0 到 tf 的积分,初始条件为 y0。解数组 y 中的每一行都与列向量 t 中返回的值相对应。
其中,关于 ode45 中的 rlcsys 代表了要求解的函数odefun,指向待积分函数的句柄。
对于标量 t 和 列向量 y 来说,函数dydt = odefun(t, y)必须返回数据类型为 single 或者 double 的列向量 dydt,该列向量对应于f(t,y)。odefun 必须同时接受输入产生 t 和 y,即使其他一个参数未在函数中使用也是如此。
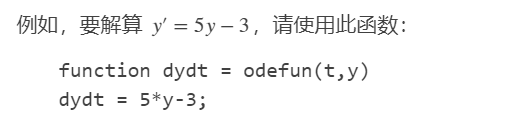
对于方程组,odefun 的输出为向量,向量中的每个元素都是一个方程的解,例如
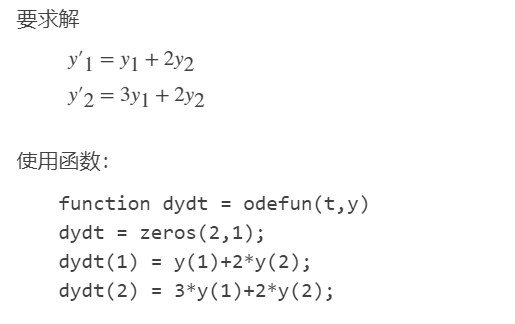
tspan 积分区间,指定为 向量。其中,必须至少是 一个二元素向量[t0 tf],用于指定初始时间和最终时间。要获取 t0 到 tf 之间的特定时间的解,请使用 [t0, t1, t2, … , tf]形式的长向量。 tspan 中的元素必须单调递增或单调递减。
求解器在初始时间 tspan(1) 施加由y0给出的初始条件,然后求tspan(1) 到tspan(end)的积分:
- 如果 tspan 由两个元素,[t0 tf],求解器将返回在该区间内的每个内部积分计算的解。即 由 从 t0 到 tf 之间的每个值得解
- 如果 tspan 包含两个以上的元素 [t0, t1, t2, … , tf] ,求解器 将返回在给定点处计算的解。但是,求解器不会精确步进到 tspan 中指定的每一个点。此时,求解器使用自己的内部积分来计算解,然后再tspan中请求的各点处计算解
- 将 tspan 指定为 二元素向量还是包含中间点得向量,求解器获得得解可能有所不同
y0 初始条件,指定为向量。y0 得长度必须与 odefun 得向量输出相同,使y0为odefun中定义得每个方程包含一个初始条件。即,y0向量以及输出向量的长度和要求解的微分方程的个数相同。
输出参数 t: 计算点,以列向量形式返回
- 如果 tspan 包含两个元素,[t0 tf],则 t 包含 用于执行积分的内部计算点
- 如果 tspan 包含两个以上元素,则t与tspan相同
输出参数 y: 解,以数组形式返回,y中的每一行都与 t 的相应行中返回的值处的解相对应。
拉氏变换与控制系统模型
动态系统的数学模型:微分方程、差分方程、传递函数、状态方程等
其中,微分方程描述的系统模型,通过求解微分方程,可以得到系统随时间的变化规律,比较直观;但是当微分方程的阶数较高的时候,求解就回变得十分困难,不易实现,=== 采用 拉氏变换 将原来的时域转换为复频域,进而吧微分方程转换为 代数方程,而代数方程的求解是比较简单的,求解代数方程之后,再通过拉氏变换得到微分方程的解。
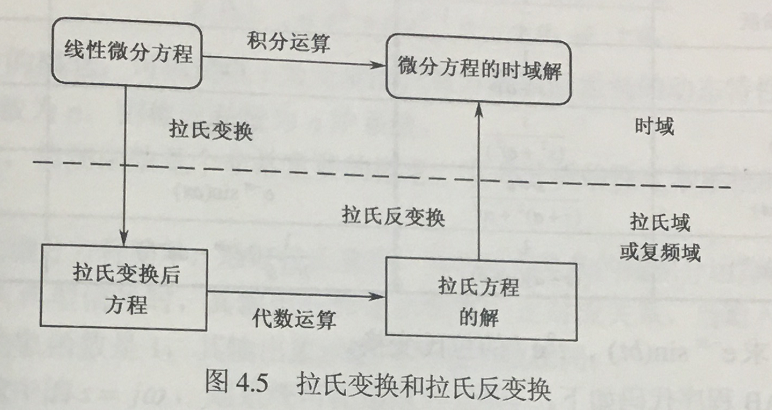
线性微分方程 通过拉氏变换得到代数方程,采用代数运算求解代数方程,得到代数解,再通过拉氏反变换得到微分方程的时域解
时域函数
f
(
t
)
f(t)
f(t)的拉氏变换定义如下:
F
(
s
)
=
∫
0
∞
f
(
t
)
e
−
s
t
d
t
F(s) = int_{0}^{infty} f(t) e^{-st} dt
F(s)=∫0∞f(t)e−stdt
其中,
s
s
s是拉式算子,单位是 1/time, 即频率。下图是 拉氏变换 的基本定理
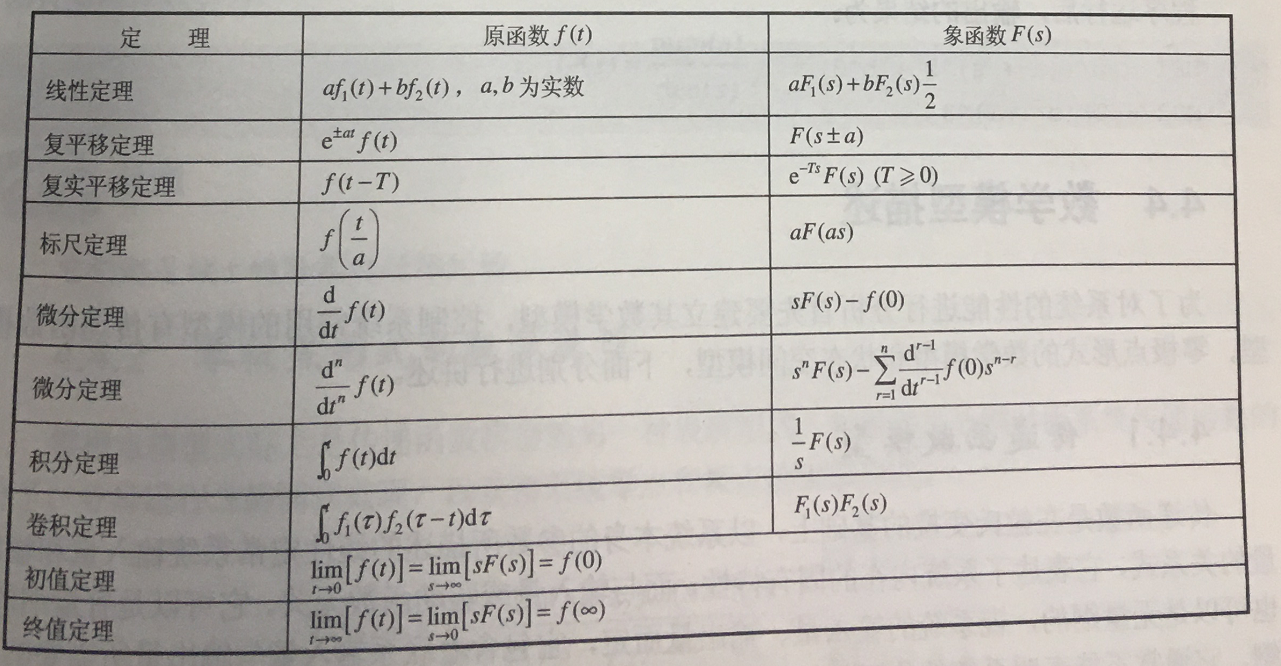
常见的 拉氏变换表
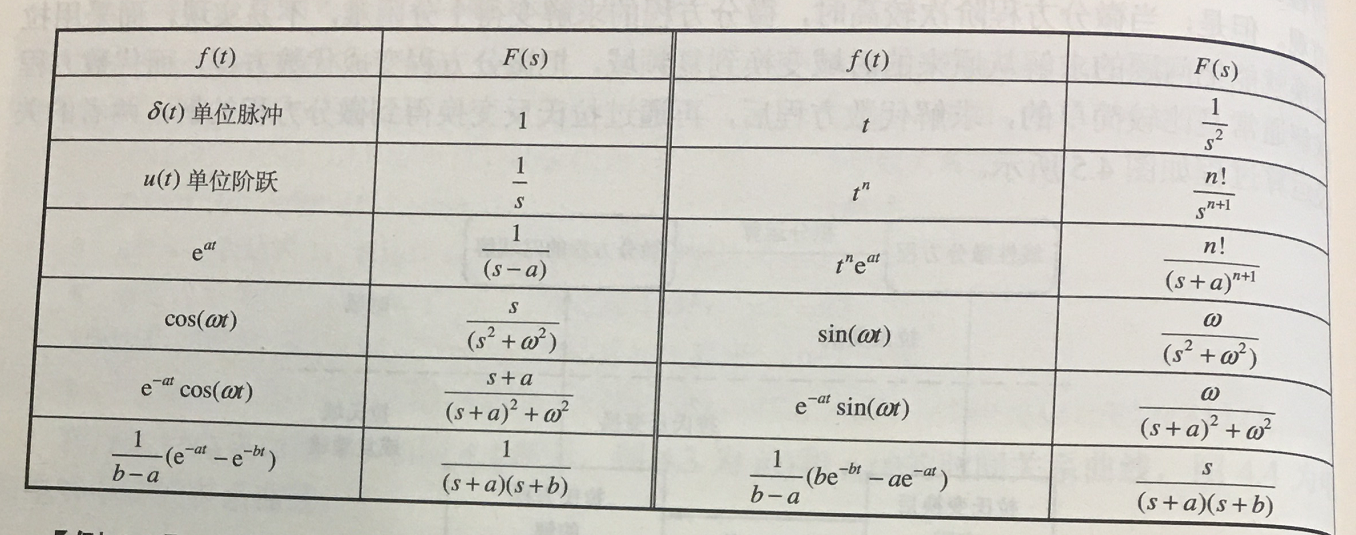
下面的例子是 求解 e − a t s i n ( b t ) e^{-at}sin(bt) e−atsin(bt) 和 t 2 e − t t^2 e^{-t} t2e−t 的拉氏变换
% 求解拉氏变换
% 函数 laplace 主要求解一个微分方程的 拉氏变换方程
syms t s;
% 定义了符号变量
syms a b positive
% 定义符号变量
D1 = exp(-a * t) * sin(b*t);
D2 = t^2 * exp(-t);
MS1 = laplace(D1, t, s); % 独立变量为 t,传递变量为 s
MS2 = laplace(D2, t, s);
%% 执行结果输出
% MS1 = b/((a + s)^2 + b^2)
% MS2 = 2/(s + 1)^3
数学模型的描述
为了对系统的性能进行分析的步骤首先要 建立其数学模型
控制系统常见的模型有:
传递函数模型、
零极点形式的数学模型、
状态空间模型
传递函数模型
表达了系统内在的固有特性;不能表明系统的物理特性和物理结构
许多物理性质不同的系统却有着相同的传递函数
其中,线性定常系统的传递函数定义为:在零初始条件下,输出量(响应函数)的拉普拉斯变换与输入量(驱动函数)的拉普拉斯变换之比
- 零初始条件
- 输出量是响应函数,输入量是 驱动函数;传递函数为 输出比输入
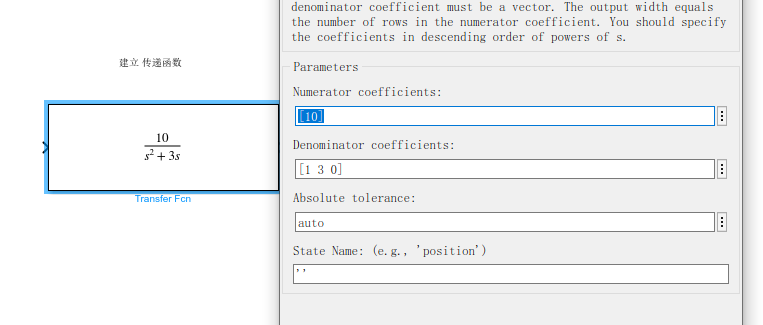
传递函数中,分母中s的最高次数为 n,则称该系统为n阶系统;传递函数的零极点(零点(分子为0)和极点(分母为0))分布决定系统的动态特性。对于线性定常系统,传递函数中的s的系数均为常数,且 a 0 a_{0} a0不等于0,这个时候可以在matlab中使用下面的方式来进行表示:使用 tf函数来表示 传递函数
%% 传递函数表示
num = [1, 2, 3, 4];
den = [7, 8, 9, 10];
% 都是按照s的降次幂来进行排序的
G = tf(num,den);
% 执行效果
s^3 + 2 s^2 + 3 s + 4
G =
------------------------
7 s^3 + 8 s^2 + 9 s + 10
num=[1,10];
den=[1,5,4,3,2];
G=tf(num,den);
% 执行结果:
s + 10
G =
-----------------------------
s^4 + 5 s^3 + 4 s^2 + 3 s + 2
零极点形式的数学模型
是传递函数的另外一个表示形式,原理是 分别对原系统传递函数的分子、分母进行因式分解处理,以获得系统的零点和极点的表示形式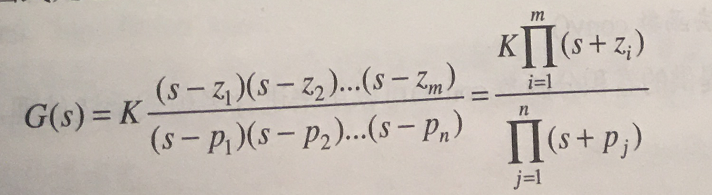
其中,K表示系统增益,
−
z
i
-z_i
−zi为系统的零点,
−
p
j
-p_j
−pj为系统的极点;传递函数的分母多项式就是它的特征多项式,它等于零的方程就是传递函数的特征方程,特征方程的根也是传递函数的极点。
传递函数的极点:决定了所描述系统的自由运动模态
传递函数的零点:影响系统各个模态在系统响应中所占的比重。
控制系统 常用到 并联系统,这时 就要对系统函数进行求解,使其表现为一些基本控制单元的和的形式,也就是用部分分式表示 G ( s ) = K 1 s − z 1 s − p 1 + K 2 s − z 2 s − p 2 + . . . . + K n s − z n s − p n = ∑ i = 1 n K i s − z i s − p i G(s) = K_1 frac{s - z_1}{s - p_1} + K_2 frac{s - z_2}{s - p_2} + .... + K_n frac{s - z_n}{s - p_n} = sum_{i=1}^n K_{i} frac{s - z_i}{s - p_i} G(s)=K1s−p1s−z1+K2s−p2s−z2+....+Kns−pns−zn=i=1∑nKis−pis−zi式中, K i K_i Ki 为各个部分分式的增益; − z i -z_i −zi 是分子多项式的根,称为系统的零点; − p j -p_{j} −pj 是分母多项式的根,称为系统的极点。
状态空间模型
以时域分析为主,着眼于系统的内部状态及其内部联系
状态:系统动态信息的集合,在表征系统信息的所有变量中,能够全部描述系统运行的最小数目的一组对立变量称为 系统的状态变量,其选取不是唯一的
具有n个状态、r个输入和m个输出的线性时不变系统,用矩阵符号表示的状态空间模型如下:
x
˙
=
A
x
+
B
u
(
状
态
方
程
)
y
=
C
x
+
D
u
(
输
出
方
程
)
begin{aligned} dot{x} &= Ax + Bu (状态方程)\ y & = Cx + Du (输出方程)\ end{aligned}
x˙y=Ax+Bu(状态方程)=Cx+Du(输出方程)式中,
状态变量
x
x
x是n维的,
输入向量 u 是 r 维的,
输出向量 y 是 m 维的,
状态矩阵 A 是n * n维的,
输入矩阵B是n * r维的,
输出矩阵C 是m*n 维的,
前馈矩阵 D 是 m * r 维的,
对于时不变系统,A、B、C、D都是常数矩阵。
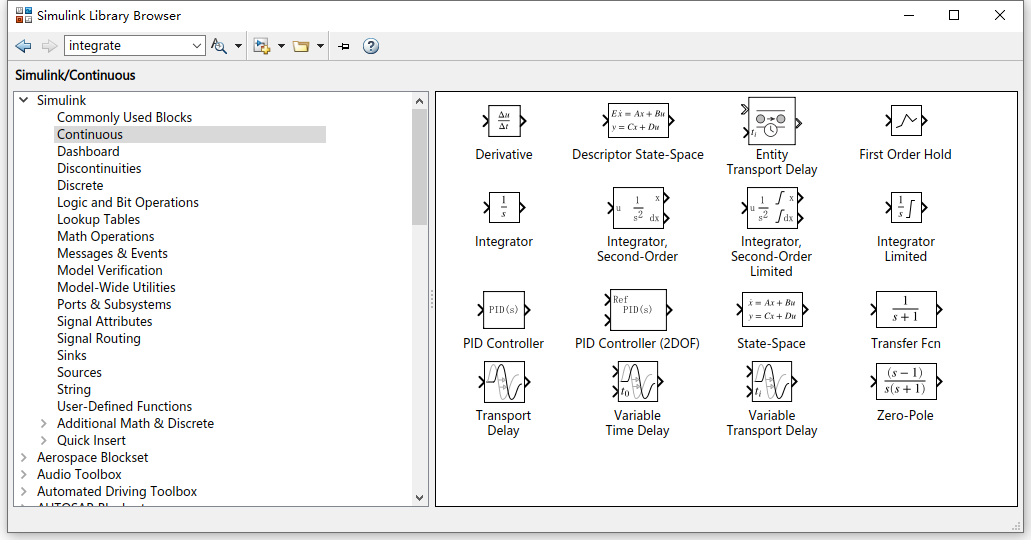
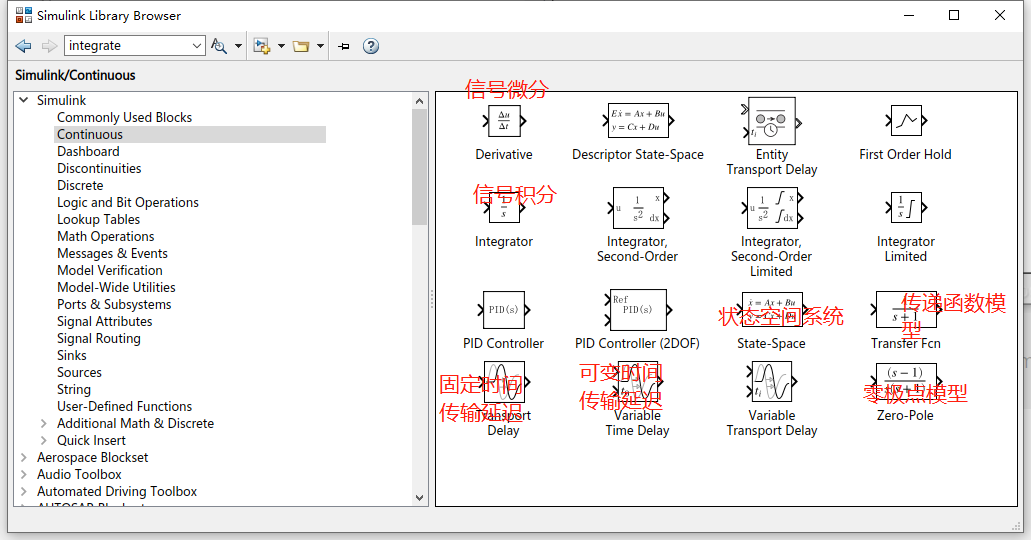
Matlab / Simulink 在模型中的应用
多项式处理相关的函数
Matlab 中多项式用行向量表示,行向量元素依次为降幂排列的多项式的系数
多项式乘法函数
conv() 进行多项式乘法处理,其常见的函数调用格式为
% A B 为 一个多项式的系数(降幂排列) C 为多项式的乘积多项式,其中 conv 函数允许多级嵌套
C = conv(A, B)
多项式求根函数
p 为多项式,r为所求的根
r = root(p)
由根创建多项式函数
某一个多项式的因式分解式或特征根r,可用函数 ploy 函数直接得出特征多项式系数矢量p
p = poly(r)
求多项式在给定点的值函数
如果已知多项式 p,要求其变量取a时的值v,可用 polyval() 来求取
v = polyval(p, a)
建立传递函数相关的函数
利用传递函数分子和分母多项式的系数向量进行描述,分子 num、分母 den 多项式的系数向量分别为 :
num = [
b
m
,
b
m
−
1
,
,
b
m
−
2
.
.
.
,
b
0
b_m, b_{m-1}, , b_{m-2}... , b_{0}
bm,bm−1,,bm−2...,b0], den = [
1
,
a
n
−
1
,
a
n
−
2
.
.
.
,
a
0
1, a_{n-1}, a_{n-2}... , a_{0}
1,an−1,an−2...,a0],分别为按照系数降幂排列
- 建立传递函数模型的函数 tf()
sys = tf(num, den);
% 常规系统 G(s) 的传递函数
sys = tf(num, den, 'InputDelay', tau);
% 带有时间延迟的系统传递函数 tau 为系统延迟时间的数值
带时间延迟系统的传递函数 G d ( s ) = G ( s ) e − τ s G_{d}(s) = G(s)e^{- tau s} Gd(s)=G(s)e−τs
- 提取模型中分子分母多项式系数的函数 tfdata()
从传递函数中提起模型中的分子分母多项式系数
[num, den] = tfdata(sys, 'v') % v 是关键词,其功能是返回列向量形式的分子分母多项式系数
建立零极点形式的数学模型相关函数
- 建立零极点形式数学模型的函数 zpk()
- 提取模型中 零极点 和增益向量的函数zpkdata()
- 传递函数模型部分分式展开的函数 residue(),是对两个多项式的比进行部分展开,以及把传递函数分解为微分单元的形式
sys = zpk([z], [p]. [k]); % 分别为系统的零极点和增益向量
sys = zpk(z, p, k, 'InputDelay', tau)
[z, p, k] = zpkdata(sys, 'v')
[r, p, k] = residue(b. a);
% 向量b 和向量 a 是按s降幂排列的多项式系数。部分分式展开后,余数返回到向量r,极点返回到列向量p,常数项返回到k
建立状态空间模型相关函数
A B C D 系统状态空间矩阵
- 建立 ss()
- 提取 ssdata()
sys = ss(A, B, C, D);
[A, B, C, D] = ssdata(sys);
simulink 中的控制系统模型表示
simulink 中模型与状态空间模型的转化
以状态空间形式线性化模型的函数命令: linmod(连续系统线性化) 和 dlinmod(离散系统线性化),提供模型线性化时的操作点,返回的是 围绕操作点处系统线性化的状态空间模型。 将 simulink 系统转化为线性系统
需要注意的是:
在转化的时候,避免 simulink 中包 Derivative 模块和 Transport Delay 模块,分别应该使用 Simulink Extras 库下的 Linearization 子库中的 Switched derivative for linearization 模块和 Switched transport delay for linearization 模块代替 (见 课本的 p82 )
应用实例

%% conv(u, v) 将两个多项式进行相乘
num = conv([1, 1], conv([1, 2, 6], [1, 2, 6]));
num
den = conv([1, 0, 0], conv([1, 3], [1, 2, 3, 4]));
den
r = roots(den); % 求特征方程的根
r

%% 传递函数表示:输出 u / 输入 y
num = [1, 4, 8];
den = [1, 11, 11, 10];
G = tf(num, den)
% 执行结果
G =
s^2 + 4 s + 8
------------------------
s^3 + 11 s^2 + 11 s + 10

tf2zpk 将传递函数的分子和分母转化到 零极点增益模型 [z, p, k] = tf2zpk(num, den);
%% 求分子分母多项式、零极点
%% 表示 传递函数
num = [1, 4, 8];
den = [1, 11, 11, 10];
G = tf(num, den);
[tt, ff] = tfdata(G, 'v'); % 获取分子num和分母den
[z, p, k] = tf2zpk(num, den);
% 提取传递函数的零极点和增益
tt
ff
z
p
k

clear
clc
%% 求部分分式表示形式
num = [2, 0, 9, 1];
den = [1, 1, 4, 4];
[r, p, k] = residue(num, den)
% 求取系统的部分分式
% 执行结果:余数返回到向量r,极点返回到列向量p,常数项返回到k
r =
各个分式项的分子
-0.0000 - 0.2500i
-0.0000 + 0.2500i
-2.0000 + 0.0000i
p = 极点 各个分式项的分母
0.0000 + 2.0000i
0.0000 - 2.0000i
-1.0000 + 0.0000i
k = 常数项
2

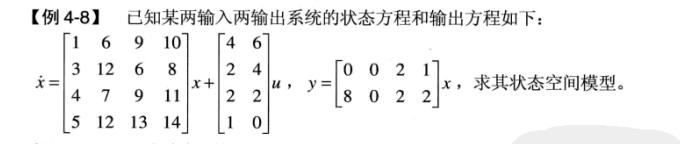
%% 求状态空间模型 ss()
A = [1 6 9 10; 3 12 6 8; 4 7 9 11; 5 12 13 14];
B = [4 6; 2 4; 2 2; 1 0];
C = [0 0 2 1; 8 0 2 2];
D = zeros(2,2);
G = ss(A, B, C, D)
% 执行结果
G =
A =
x1
x2
x3
x4
x1
1
6
9
10
x2
3
12
6
8
x3
4
7
9
11
x4
5
12
13
14
B =
u1
u2
x1
4
6
x2
2
4
x3
2
2
x4
1
0
C =
x1
x2
x3
x4
y1
0
0
2
1
y2
8
0
2
2
D =
u1
u2
y1
0
0
y2
0
0
Continuous-time state-space model.

这里的线性状态空间模型,需要使用 linmod 函数进行使用
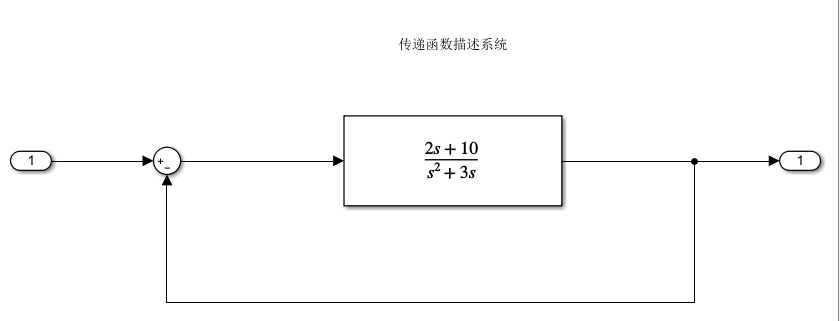
%% 传递函数 线性状态空间模型化
[A, B, C, D] = linmod('Demo4_9');
% 连续系统线性化 转化为状态空间模型
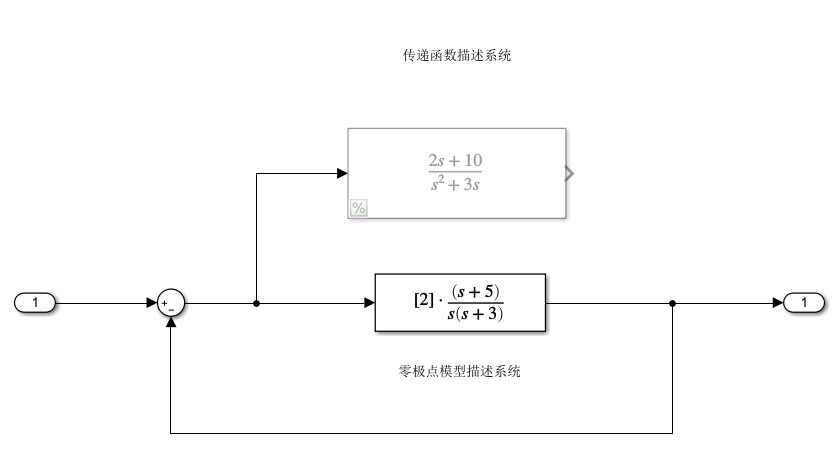
零极点模型:该传递函数的零点为 -5, 极点为 0和-3,增益为 2;
系统模型转换及连接
模型转换
在不同的场景下,使用的模型表示也不尽相同,所以,我们需要将模型之间进行相互的模型转换;转换关系图如下:xx2xx(sys)
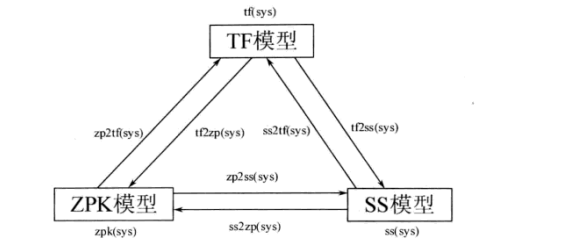
其中,tf表示传递函数,zp表示零极点模型;ss表示传递函数模型

clear;
clc
%% 将零极点模型转换为 传递函数模型和状态空间模型
% 使用的函数为:zp2tf(sys); zp2ss(sys)
z = -2;
p = [-1, -3, -5];
k = 6;
[num, den] = zp2tf(z, p, k);
[A, B, C, D] = zp2ss(z, p, k);
% 建立对应的模型
g_zpk = zpk(z, p, k)
g_tf = tf(num, den)
g_ss = ss(A, B, C, D)
% 执行结果
g_zpk =
6 (s+2)
-----------------
(s+1) (s+3) (s+5)
Continuous-time zero/pole/gain model.
g_tf =
6 s + 12
-----------------------
s^3 + 9 s^2 + 23 s + 15
Continuous-time transfer function.
g_ss =
A =
x1
x2
x3
x1
-1
0
0
x2
1
-8
-3.873
x3
0
3.873
0
B =
u1
x1
1
x2
1
x3
0
C =
x1
x2
x3
y1
0
0
1.549
D =
u1
y1
0
Continuous-time state-space model.
模型连接
串联连接
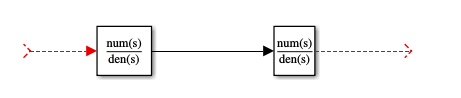
串联传递函数为 相乘
% num1, den1:第一个传递函数的分子和分母
% num2, den2:第二个传递函数的分子和分母
% num, den:串联后的传递函数的分子和分母
[num, den] = series(num1, den1, num2, den2);
并联连接
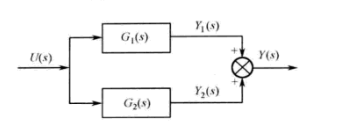
[num, den] = parallel(num1, den1, num2, den2);
反馈连接
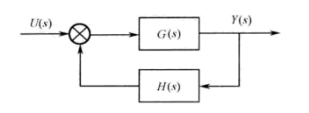
当系统为正反馈的时候,
G
H
(
s
)
=
G
(
s
)
H
(
s
)
1
−
G
(
s
)
H
(
s
)
GH(s) = frac{G(s)H(s)}{1 - G(s)H(s)}
GH(s)=1−G(s)H(s)G(s)H(s)
当系统为负反馈的时候,
G
H
(
s
)
=
G
(
s
)
H
(
s
)
1
+
G
(
s
)
H
(
s
)
GH(s) = frac{G(s)H(s)}{1 + G(s)H(s)}
GH(s)=1+G(s)H(s)G(s)H(s)
% sign 表示G(s)输入的连接符号,默认为 负值;表示系统H(s)输出到系统G(s)输入的连接符号
[num, den] = feedback(num1, den1, num2, den2, sign);
闭环连接
单位反馈连接,即 H(s) = 1 的一个特例
% sign 表示G(s)输入的连接符号,默认为 负值;表示系统H(s)输出到系统G(s)输入的连接符号
[numc, denc] = cloop(num, den, sign);
模型连接的 Matlab 实现

z1 = -2;
p1 = [-1, -3. -5];
k1 = 6;
[num1, den1] = zp2tf(z1, p1, k1);
z2 = -2.5;
p2 = [-1, -4];
k2 = 1;
[num2, den2] = zp2tf(z2, p2, k2);
[numS, denS] = series(num1, den1, num2, den2);
[numP, denP] = parallel(num1, den1, num2, den2);
GS = tf(numS, denS)
GP = tf(numP, denP)
% 执行结果
GS =
6 s^2 + 27 s + 30
--------------------------------------------
s^5 + 14 s^4 + 72 s^3 + 166 s^2 + 167 s + 60
Continuous-time transfer function.
GP =
s^4 + 17.5 s^3 + 87.5 s^2 + 156.5 s + 85.5
--------------------------------------------
s^5 + 14 s^4 + 72 s^3 + 166 s^2 + 167 s + 60
Continuous-time transfer function.

%% 反馈函数
num1 = [1, -1];
den1 = [1, -5, -2];
num2 = [1, 1];
den2 = [1, 3, 2];
H = 1;
% 闭环连接
[numc, denc] = cloop(num1, den1)
c_tf = tf(numc, denc)
% 负反馈函数
[numf, denf] = feedback(num1, den1,num2, den2);
f_tf = tf(numf, denf)
% 执行结果
c_tf =
s - 1
-------------
s^2 - 4 s - 3
Continuous-time transfer function.
f_tf =
s^3 + 2 s^2 - s - 2
-------------------------------
s^4 - 2 s^3 - 14 s^2 - 16 s - 5
Continuous-time transfer function.
非线性数学模型的线性化
线性系统满足叠加性和齐次性,反之则为非线性模型。我们需要将非线性系统进行线性化,方便我们处理。
在控制工程中,如果系统的运行是围绕平衡点进行的,并且系统中的信号是围绕平衡点变化的小信号,那么就可以用线性系统去近似非线性系统。这种线性系统在有限的工作范围内等价于原来的非线性系统。在控制工程中,这种线性化模型是很重要的。
线性化过程 是用数学方法来处理,将一个非线性函数 y = f ( x ) y = f(x) y=f(x) ,在其工作点 ( x 0 , y 0 ) (x_0, y_0) (x0,y0) 处展开成泰勒级数,然后忽略其二次以上的高阶项得到线性化方程,并以此代替原来的非线性函数。
单输入单输出的函数:
设系统的输入量为 x(t), 输出量为y(t), 系统正常工作点为
y
0
=
f
(
x
0
)
y_0 = f(x_0)
y0=f(x0),则:
展开为:
y
=
f
(
x
0
)
+
(
d
f
(
x
)
d
x
)
x
=
x
0
(
x
−
x
0
)
=
y
0
+
K
(
x
−
x
0
)
y = f(x_0) + ( frac{mathrm{d} f(x) }{mathrm{d} x})_{x=x_0} (x- x_0) = y_0 + K (x- x_0)
y=f(x0)+(dxdf(x))x=x0(x−x0)=y0+K(x−x0) 该式表明,
y
−
y
0
y-y_0
y−y0与
x
−
x
0
x-x_0
x−x0成正比
对于多输入多输出的函数:
下面是两个输入变量的函数
y
=
f
(
x
1
,
x
2
)
y = f(x_1, x_2)
y=f(x1,x2)在工作点
x
1
=
x
10
x_1 = x_{10}
x1=x10,
x
2
=
x
20
x_2 = x_{20}
x2=x20处的线性化为例进行介绍:
方程
y
=
f
(
x
1
,
x
2
)
y = f(x_1, x_2)
y=f(x1,x2) 在工作点附近展开成泰勒级数如下:

忽略高阶项:



需要注意的是:
上面的线性化,只有在工作状态附近才是正确的。当工作状态的变化范围很大的时候,线性化方程就不合适了,这个时候,就必须使用非线性方程。
综合实例及matlab/simulink应用

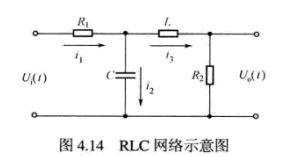
第一步:从数学上求出系统的传递函数:
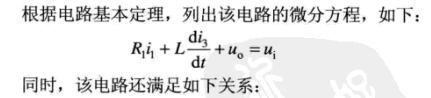

将上面的三个式子带入第一个微分方程中,得到:

在零初始条件下,对上式去拉普拉斯变换,整理可得:

第二步:使用 matlab 建立系统模型:
clear all;
clc
num = [0 1];
den = [1 2 2];
sys_tf = tf(num, den)
[z, p, k] = tf2zp(num, den)
sys_zpk = zpk(z, p, k)
[A, B, C, D] = zp2ss(z, p, k);
sys_ss = ss(A, B, C, D)
%% 执行结果
sys_tf =
1
-------------
s^2 + 2 s + 2
Continuous-time transfer function.
z =
空的 0×1 double 列向量
p =
-1.0000 + 1.0000i
-1.0000 - 1.0000i
k =
1
sys_zpk =
1
--------------
(s^2 + 2s + 2)
Continuous-time zero/pole/gain model.
sys_ss =
A =
x1
x2
x1
-2
-1.414
x2
1.414
0
B =
u1
x1
1
x2
0
C =
x1
x2
y1
0
0.7071
D =
u1
y1
0
Continuous-time state-space model.
第三步:求取阶跃响应:
%% 画出任意一个动态系统模型sys的阶跃响应。这个模型可以是连续的或离散的,和单输入单输出或多输入多输出。
step(sys_tf);
grid on;
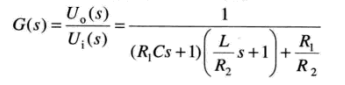
采用 simulink 动态结构图仿真的思路是:利用 simulink 提供的提取线性模型的函数 linmod() 或 linmod2(), 得到状态空间模型,然后就可以对状态空间模型进行各种仿真
步骤一:建立 simulink 动态结构图
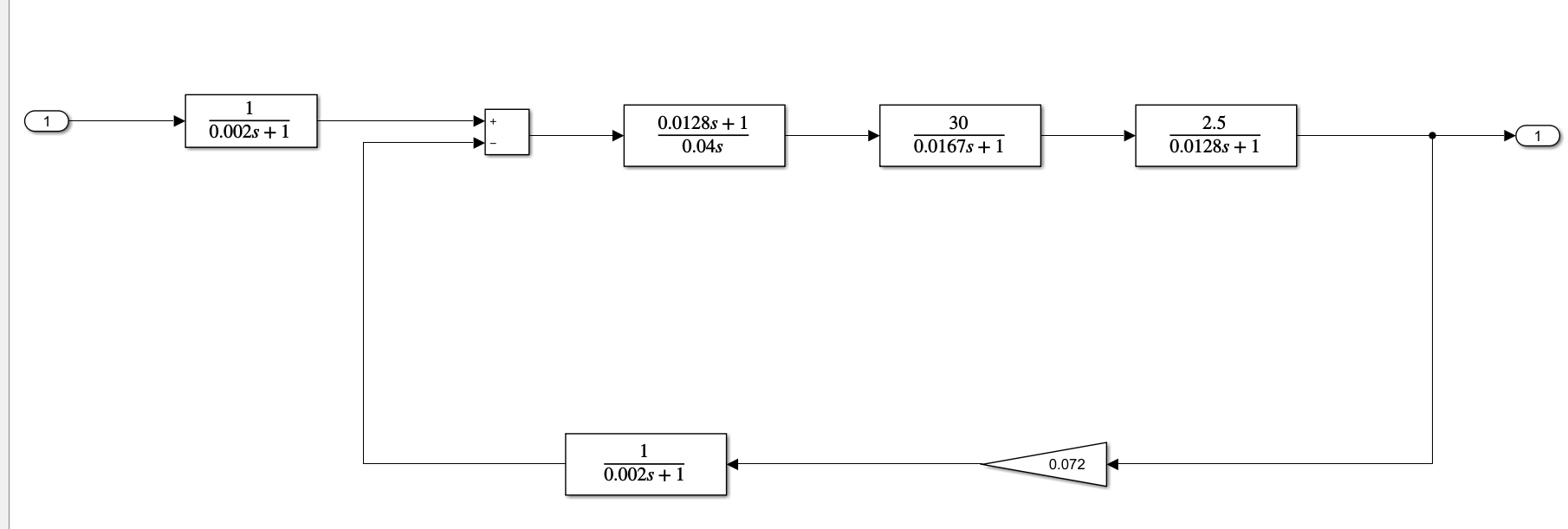
步骤二:求取系统的线性状态空间模型
%% 求取线性状态空间模型
[A, B, C, D] = linmod('Demo4_14')
步骤三:求系统的传递函数模型
%% 求系统的传递函数模型
[num, den] = ss2tf(A, B, C, D);
% prints the transfer function as a ratio of two polynomials in the transform variable 's' or 'z'. 将传递函数打印为转换变量's'或'z'中两个多项式的比率。
printsys(num, den, 's');
% 以传递函数形式显示出来
% 执行结果
A =
1.0e+03 *
-0.0781
0
0
0
1.7964
0
-0.5000
0
0
0
0.0141
0
-0.5000
0
0
0
0.5000
-0.5000
0
0
0
0.1600
-0.1600
0.0250
-0.0599
B =
0
1
0
0
0
C =
195.3125
0
0
0
0
D =
0
num/den =
56137724.5509 s^2 + 32454622005.988 s + 2192879865269.461
-----------------------------------------------------------------------------
s^5 + 1138.0052 s^4 + 392683.3832 s^3 + 43221369.7605 s^2 + 3506268712.5748 s
+ 157887350299.401
最后
以上就是失眠飞鸟最近收集整理的关于matlab simulink chapter4:控制系统的数学模型的全部内容,更多相关matlab内容请搜索靠谱客的其他文章。








发表评论 取消回复