1 车速控制
在纵向方向上,为了使车辆保持低速且尽可能匀速行驶,并且为了车辆能更好的跟踪期望路径,需要精确控制车速的大小。控制车速的原理是控制器根据车辆实时反馈的车速进行计算,得到油门或制动控制量,使得车辆的实际速度维持在期望车速附近。
不同的控制算法都能达到控制车速的目的,如PID控制、滑模控制、模糊控制和神经网络等。由于车速控制属于自动泊车系统中的小规模控制系统,车速控制器可以看作是单输入和单输出的反馈系统,因此采用结构简单、无需依赖精确模型的PID控制较为适合。
1.1 PID控制理论
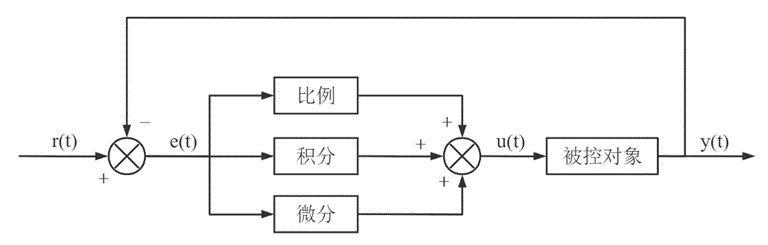
PID控制系统由比例单元P(Proportion)、积分单元I(Integration)和微分单元D(Differentiation)组成。PID控制是工业控制应用中常用的控制方法,有着结构简单、稳定性好和适用性强等优点,并且不需要精确的被控对象模型,若不知道受控对象的特性,一般情况下认为PID控制是最适用的控制方法。PID控制的比例单元、积分单元和微分单元分别对应着目前误差、过去累计误差和未来误差,可以通过调节PID控制的三个参数来调整控制系统,使其设法满足设计需求。PID控制器的输出可以表示为:

PID控制系统的原理如下图所示。在实际情况中,有时候只需要使用PID控制器的部分单元,可以将不需要的单元参数设为零,因此PID控制器可以变成PI控制器、PD控制器、P控制器或I控制器。其中PI控制应用场合较多,在参考值为恒定情况下使用PI控制较多,而PD控制拥有比例控制和积分控制可以超前调节的特点,使得控制更加迅速。
1.2 车速控制模型搭建与仿真
由于泊车是车辆低速运动的过程,车速一般控制在 左右,发动机在怠速情况下,档位置一档和倒车档时,车速一般在 以下,因此,泊车过程需要通过控制制动压力使车速减小到5 左右,以达到车辆控制的目的。
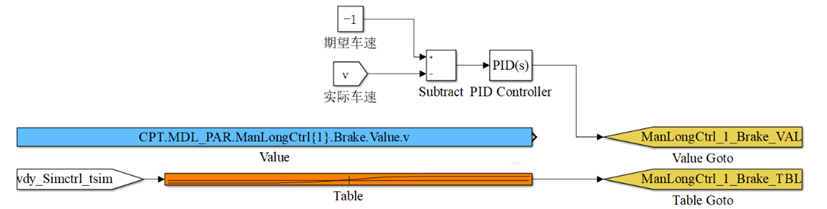
在Simulink中使用PID模块搭建车速控制器,将PID控制模型与veDYNA车辆动力学模型进行联合,动力学模型输出的车速和设定的期望车速作为PID控制模型的输入,PID控制模型输出的制动压力百分比作为动力学模型的输入,模型如下图所示。
设置期望车速为-1m/s ,使用车速控制器控制veDYNA动力学模型,在simulink中测试车速控制器的控制能力,仿真结果如下图所示。
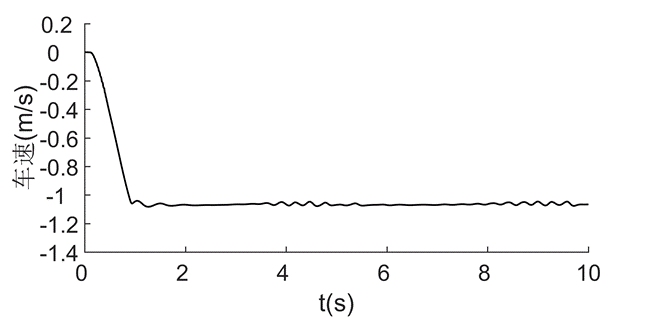
从图中可以看出,车速在 左右达到期望车速位置,当车速达到期望车速后,车速保持在-1m/s附近,波动范围较小,能够稳定在期望车速附近,说明PID控制模型能较好的控制车速,车速控制器控制效果稳定可靠,为后续的路径跟踪控制提供了基础。
最后
以上就是纯真灰狼最近收集整理的关于平行泊车系统路径跟踪控制(1)的全部内容,更多相关平行泊车系统路径跟踪控制(1)内容请搜索靠谱客的其他文章。








发表评论 取消回复