伯德图分析系统性能
- 1. 基本概念
- 2. 伯德图绘制
- 3. 系统分析
- 3.1 开环频率与闭环系统性能的关系
- 3.2 相位裕量 & 幅值裕量
- 3.3 三段频分析系统性能
- 3.4 其他指标对系统的影响
1. 基本概念
- 定义
伯德图是系统频率响应的一种图示方法。也称为开环对数频率特性曲线。 - 作用
根据Bode图,从系统频率的角度分析系统性能。 - 坐标系
伯德图由两张图组成,一个是幅频特性曲线,另一个是相频特性曲线。
伯德图横坐标为对数刻度,纵坐标幅值或相角采用线性分度。
幅频特性曲线,其中横坐标上为 ω omega ω,单位为 r a d / s rad/s rad/s,刻度为对数刻度,按照 lg ω lg{omega} lgω刻度;纵坐标为 20 lg ∣ G ( j ω ) ∣ 20 lg{|G(jomega)|} 20lg∣G(jω)∣,单位为分贝(dB),按照线性刻度。
相位特性曲线,其中横坐标上为 ω omega ω,单位为 r a d / s rad/s rad/s,刻度为对数刻度,按照 lg ω lg{omega} lgω刻度;纵坐标为 φ ( ω ) varphi(omega) φ(ω),单位为度(°)按照线性刻度。
2. 伯德图绘制
绘制伯德图的一般步骤为:首先将开环频率特性改写为基本环节的乘积,画出各基本环节的伯德图,然后把各基本环节伯德图的对数幅值相加,相角相加,就得到系统的伯德图。
其中基本环节有:
- 比例环节;
- 惯性环节;
- 一阶微分环节;
- 积分环节;
- 微分环节;
- 振荡环节;
- 二阶微分环节;
- 延迟环节。
伯德图幅频特性曲线绘制的具体步骤:
- 确定系统开环增益 K K K,并计算 20 lg K 20lg{K} 20lgK;
- 确定各个具有转折频率环节的转折频率,标在坐标轴上;
- 在坐标轴上找出横坐标 ω = 1 omega =1 ω=1,纵坐标为 20 lg K 20lg{K} 20lgK的A点;
- 过A点做一直线,使其斜率等于-20vdB/十倍频程。当v=0, v=1, v=2时,斜率分别是(0,-20,-40)/十倍频程;
- 从低频段第一个转折频率开始做斜直线,该直线的斜率等于过A点直线的斜率加这个环节的斜率(惯性环节加-20,振荡环节加-40,一阶微分环节加+20的斜率),这样过每一个转折频率都要进行斜率的加减;
- 频段最后的斜线的斜率应等于-20(n-m) dB/十倍频程;
- 若系统中有振荡环节,当 ξ < 0.4 xi<0.4 ξ<0.4 时,需对 L ( ω ) L(omega) L(ω)进行修正。
伯德图相频曲线绘制的具体步骤:
- 绘制各个环节的相频曲线;
- 各个环节的相频曲线相加;
当 ω → 0 omegato0 ω→0 时, φ ( ω ) → − v ⋅ 90 ° varphi(omega)to-vcdot90degree φ(ω)→−v⋅90°
当 ω → ∞ omegatoinfty ω→∞ 时, φ ( ω ) → − ( n − m ) ⋅ 90 ° varphi(omega)to-(n-m)cdot90degree φ(ω)→−(n−m)⋅90°
3. 系统分析
3.1 开环频率与闭环系统性能的关系
对于反馈系统来说,如下:
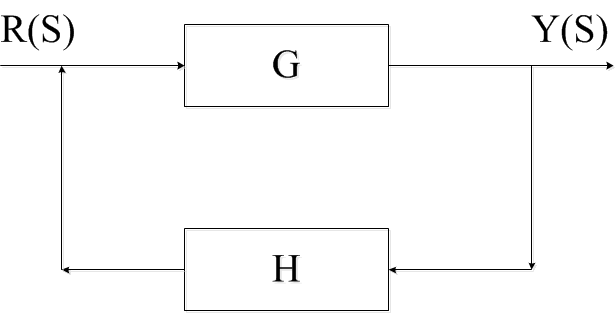
闭环传递函数
G
B
G_{B}
GB为:
G
B
(
s
)
=
G
1
+
G
H
G_{B}(s)=frac{G}{1+GH}
GB(s)=1+GHG
开环传递函数是前向通道传递函数
G
G
G与反馈通路传递函数
H
H
H的乘积。
G
K
(
s
)
=
G
H
G_{K}(s) = GH
GK(s)=GH
其中:
G
K
(
s
)
G_{K}(s)
GK(s)是开环传递函数。
因此,在系统的结构、参数一定时,
G
B
G_{B}
GB和
G
K
G_{K}
GK也是一定的。因此系统的动态响应和稳态性能就为确定的。因此,就能够通过分析开环频率特性或者闭环频率特性来了解系统的闭环响应性能。
开关频率特性和闭环频率特性都可以分析系统性能,而在实际使用中,常常使用开环频率特性。这是因为,开环频率特性分析系统判据简单,使用方便。虽然为什么开环频率特性判据可以分析系统性能,这个过程比较复杂。
但在实际使用中,使用者往往不需要知道为什么这个判据就能说明系统性能,而只需要关注这个判据能分析系统的哪个性能,由这个判据说明这个性能怎么样,就可以。比如后面说到的相位裕量,不需要知道为什么相位裕量为什么越高,系统稳定性越高,也不需要知道相位裕量为什么要大于40。只需要知道相位裕量大于40°,系统就是稳定的,且稳定性还可以。
当然,如果能知道为什么,那么对于深入分析系统有很大的帮助。比如,知道了为什么相位裕量大于40°是稳定的,那么在解决一些非常规工况时,能够灵活使用判据快速做出判断。毕竟,相位裕量40°只是一个结合理论分析和实际使用得到的经验值。
奈氏判据就是一种利用开环特性来研究闭环性能的理论。这是一种利用复变函数中的辐角原理,建立判别系统稳定与否的一种方式。
由相位裕量、幅值裕量、截止频率、三段式等指标和方式判别系统稳定性的结论均是由奈氏判据推导而来。由于推导过程比较复杂,这里不做详述。做想做进一步了解,可参考《自动控制原理》(刘丁主编)这本书第五章内容。
3.2 相位裕量 & 幅值裕量
-
原始定义
相位裕量:开环幅频曲线幅值为1对用的相角值加上180°,称为 γ gamma γ 。
幅值裕量:开环幅相曲线与负实值交点处的模值 ∣ G ( j ω g ) ∣ |G(jomega_{g})| ∣G(jωg)∣的倒数,称为 h h h。
截止频率:一般指幅频截止频率,Bode图幅频曲线与横轴交点的频率,称为 ω c omega_{c} ωc。
相频截止频率:Bode图相频曲线与-180°线交点的频率,称为 ω g omega_{g} ωg。 -
物理意义
相位裕量:如果系统对频率信号 ω c omega_{c} ωc 相位再滞后 值,系统就处于临界稳定状态。
幅值裕量:如果系统的开环放大系数增大到原来的 h h h倍,则闭环系统就进入临界稳定状态。而在应用中, 幅值裕量常常用分贝值 L h L_{h} Lh表示。
L h = 0 − 20 lg ∣ G ( j ω g ) ∣ L_{h} = 0 - 20lg{|G(jomega_{g})|} Lh=0−20lg∣G(jωg)∣ -
由伯德图计算方法
相位裕量:伯德图上截止频率对应的相位曲线上的角度与-180的差值。
幅值裕量:伯德图幅频曲线上横轴与相位截止频率对应幅频曲线值的差值。 -
系统分析
相位裕量: γ > 0 gamma>0 γ>0则系统稳定,否则系统不稳定。 γ gamma γ 值越大,其系统的稳定程度越高,工程上一般要求 γ ≥ 40 ° ( 40 ° − 60 ° ) gamma≥40degree(40degree-60degree) γ≥40°(40°−60°) 。
幅值裕量: L h > 0 L_{h}>0 Lh>0则系统稳定,否则系统不稳定。 L h L_{h} Lh值越大,其闭环系统稳定程序越高。一般要求 L h ⩾ 6 d B ( 6 d B − 10 d B ) L_{h} geqslant6 dB(6 dB-10 dB) Lh⩾6dB(6dB−10dB) 。
3.3 三段频分析系统性能
低频段是指伯德图在第一个转折频率之前的区间,该段区间由开环增益和积分环节决定;中频段是指Bode图在截止频率 ω c omega_{c} ωc 附近的区间;高频段是指频率 ω > 10 ω c omega > 10omega_{c} ω>10ωc的区间。
- 低频段与系统稳定精度的关系
该低频段的斜率愈小,位置愈高,对应于系统积分环节的数目愈多,开环增益K值愈大。故其闭环系统在满足稳定的条件下,其稳态误差愈小,系统的稳态精度愈高。 - 中频段与系统动态性能的关系
该中频段斜率小于-60,则很难使闭环系统稳定;若等于-40,所占频率区间不宜过宽,则闭环系统可能稳定,即使稳定,其相稳定裕度也较小,系统的平稳性较差;如果中频段斜率为-20,且占据较宽的频段区间,一般说来,不仅可以保证系统稳定,而且可以使相稳定裕度增大,取得较好的平稳性。同时以提高截止频率来保证系统要求的快速性。 - 高频段与系统抗干扰能力
系统开环对数幅频在高频段的幅值,直接反映了系统对输入高频干扰信号的抑制能力。高频特性的分贝值愈低,系统抗干扰能力愈强。
3.4 其他指标对系统的影响
- 带宽
系统跟踪正弦输入信号,输出信号的幅值下降到和输入幅值的某一个比例时的频率。
在系统中,高频信号体现的是信号的变换快慢,一个信号中如果高频信号幅值高,则这个信号变换速度也快。所以如果一个系统的带宽低,虽然输入频率还是在带宽范围内,那么这个系统在响应变换快速信号时(比如阶跃),他的输出就不能响应的变化速度快,会有一个平滑的过程,并且过程长幅值低,及动态指标差(响应时间等)。反之,如果系统的带宽高,则可以动态性能好,但此时会影响幅值裕量和相位裕量,影响系统的稳定性能。所以,一个系统的带宽需要高,但不能太高。 - 截止频率
截止频率根据定义,是指增益为1的时候对应频率,那么其分析规律和带宽是一致的。
最后
以上就是快乐裙子最近收集整理的关于伯德图(Bode图)分析系统性能1. 基本概念2. 伯德图绘制3. 系统分析的全部内容,更多相关伯德图(Bode图)分析系统性能1.内容请搜索靠谱客的其他文章。


![[MATLAB调试笔记]Update magnetic field in one step](https://www.shuijiaxian.com/files_image/reation/bcimg20.png)





发表评论 取消回复