最近看文献总看到离散形式和传递函数矩阵等类似的问题,特在此记录一下,本篇先讲解传递函数矩阵转化成状态空间的几种实现方法,后续会记录以下离散系统的仿真。
下面分两种情形,一种是一般的形式,一种是零极点增益形式,且均以连续为例,因为离散也是一样的,只不过加上采样时间即可。
1.一般形式
以一个简单的传递函数矩阵为例:
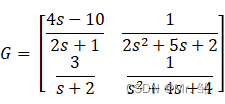
话不多说,直接给出MATLAB的实现程序,这里展示三种方法:
方法一:
思路是逐个转化后进行合并。
% from u1 to y1
num1=[4 -10];
den1=[2 1];
[A11,B11,C11,D11]=tf2ss(num1,den1);
S11=ss(A11,B11,C11,D11);
% from u2 to y1
num2=[3];
den2=[1 2];
[A12,B12,C12,D12]=tf2ss(num2,den2);
S12=ss(A12,B12,C12,D12);
% from u1 to y2
num3=[1];
den3=[2 5 2];
[A21,B21,C21,D21]=tf2ss(num3,den3);
S21=ss(A21,B21,C21,D21);
% from u2 to y2
num4=[1];
den4=[1 4 4];
[A22,B22,C22,D22]=tf2ss(num4,den4);
S22=ss(A22,B22,C22,D22);
sys=[S11 S12;S21 S22]
输出结果:
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -0.5 0 0 0 0 0
x2 0 -2 0 0 0 0
x3 0 0 -2.5 -1 0 0
x4 0 0 1 0 0 0
x5 0 0 0 0 -4 -4
x6 0 0 0 0 1 0
B =
u1 u2
x1 1 0
x2 0 1
x3 1 0
x4 0 0
x5 0 1
x6 0 0
C =
x1 x2 x3 x4 x5 x6
y1 -6 3 0 0 0 0
y2 0 0 0 0.5 0 1
D =
u1 u2
y1 2 0
y2 0 0
方法二:
num={[4 -10],[3];[1],[1]};
den={[2 1],[1 2];[2 5 2],[1 4 4]};
G=tf(num,den);
sys = ss(G)输出结果:
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -0.5 0 0 0 0 0
x2 0 -2.5 -1 0 0 0
x3 0 1 0 0 0 0
x4 0 0 0 -2 0 0
x5 0 0 0 0 -4 -2
x6 0 0 0 0 2 0
B =
u1 u2
x1 2 0
x2 0.5 0
x3 0 0
x4 0 2
x5 0 0.5
x6 0 0
C =
x1 x2 x3 x4 x5 x6
y1 -3 0 0 1.5 0 0
y2 0 0 1 0 0 1
D =
u1 u2
y1 2 0
y2 0 0
方法三:
H = [tf([4 -10],[2 1]),tf([3],[1 2]);tf([1],[2 5 2]),tf([1],[1 4 4])];
sys = ss(H)输出结果:
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -0.5 0 0 0 0 0
x2 0 -2.5 -1 0 0 0
x3 0 1 0 0 0 0
x4 0 0 0 -2 0 0
x5 0 0 0 0 -4 -2
x6 0 0 0 0 2 0
B =
u1 u2
x1 2 0
x2 0.5 0
x3 0 0
x4 0 2
x5 0 0.5
x6 0 0
C =
x1 x2 x3 x4 x5 x6
y1 -3 0 0 1.5 0 0
y2 0 0 1 0 0 1
D =
u1 u2
y1 2 0
y2 0 0
注:可以看到方法二和方法三比较简洁,结果也是一致的。至于方法一个人认为是由于转化的形式不唯一,其实系统是一样的。
2.零极点增益形式
这里以一个含复数的例子为参考:
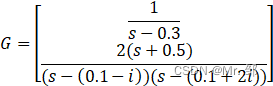
Z = {[] ; -0.5};
P = {0.3 ; [0.1-1i 0.1+2i]};
K = [1 ; 2];
G = zpk(Z,P,K)
sys = ss(G)输出结果:
G =
From input to output...
1
1: -------
(s-0.3)
2 (s+0.5)
2: -------------------------
(s-(0.1-1i)) (s-(0.1+2i))
Continuous-time zero/pole/gain model.
sys =
A =
x1 x2 x3
x1 0.3 0 0
x2 0 0.1-1i 1.08
x3 0 0 0.1+2i
B =
u1
x1 1
x2 0
x3 2
C =
x1 x2 x3
y1 1 0 0
y2 0 0.556-0.926i 1
D =
u1
y1 0
y2 0
Continuous-time state-space model.
参考资料:
利用MATLAB将传递函数矩阵变为状态空间方程 – MATLAB中文论坛
MATLAB help
最后
以上就是暴躁小懒虫最近收集整理的关于传递函数矩阵形式转化成状态空间形式(含实现程序)1.一般形式2.零极点增益形式的全部内容,更多相关传递函数矩阵形式转化成状态空间形式(含实现程序)1内容请搜索靠谱客的其他文章。






![matlab iddata函数,Matlab程序中temp(ic)= [data id]= out(ir) = Data(ir,id);这三句看不懂 程序为求Data每行出现最多的数...](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)

发表评论 取消回复