一、拉氏变换
如果用微分方程描述系统模型,求解会变得困难。而把微分方程转换为拉氏变换后,再求解则变得相对容易。
求![]() 的拉氏变换
的拉氏变换
clear;close all;clc;
syms t s; %定义符号
D = t^2*exp(-t); %表达式
MS = laplace(D,t,s); %拉氏变换
pretty(MS) %按数学的习惯显示公式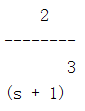
二、传递函数模型
clear;close all;clc;
num=[1 4 8]; %分子多项式
den=[1 11 11 10]; %分母多项式
G=tf(num,den) %传递函数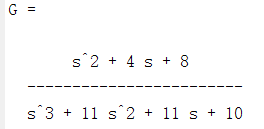
分子/分母多项式如果是乘积的形式,可以用conv(),conv()支持嵌套。
den=conv([1 11 11 10],[1,0]);三、零极点模型
clear;close all;clc;
num=[1 4 8];
den=conv([1 11 11 10],[1,0]);
G=tf(num,den) %传递函数
[z,p,k]=tf2zp(num,den) %零极点和增益
[r,p,k]=residue(num,den) %部分分式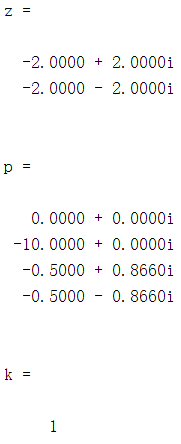
四、状态空间模型
clear;close all;clc;
A=[1 6 9 10;3 12 6 8;4 7 9 11;5 12 13 14];
B=[4 6;2 4;2 2;1 0];
C=[0 0 2 1;8 0 2 2];
D=zeros(2,2);
G=ss(A,B,C,D)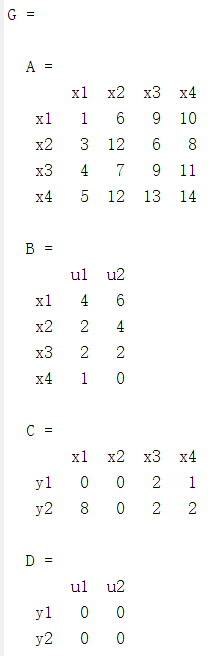
五、模型的转换
clear;close all;clc;
z=[-2];p=[-1,-3,-5];k=6;
[num,den]=zp2tf(z,p,k) %零极点转传递函数
[A,B,C,D]=zp2ss(z,p,k) %零极点转状态空间
g_zpk=zpk(z,p,k) %零极点模型
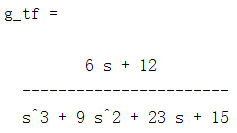
g_tf=tf(num,den) %传递函数模型
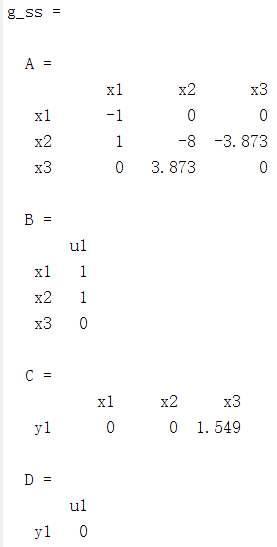
g_ss=ss(A,B,C,D) %状态空间模型
%转换函数有:ss2tf,ss2zp,tf2zp,tf2ss,zp2ss,zp2tf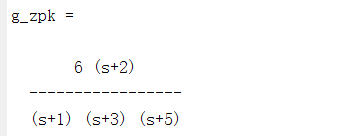
六、模型的连接
clear;close all;clc;
num1=6*[1,2];
den1=conv([1,1],conv([1,3],[1,5]));
num2=[1,2.5];
den2=conv([1,1],[1,4]);
[nums,dens]=series(num1,den1,num2,den2); %串联
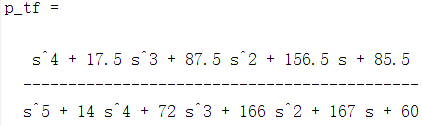
[nump,denp]=parallel(num1,den1,num2,den2); %并联
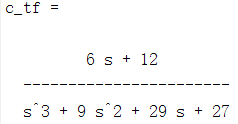
[numc,denc]=cloop(num1,den1); %闭环,H(s)=1
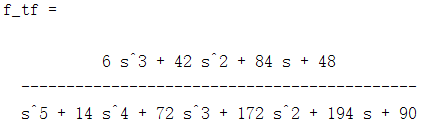
[numf,denf]=feedback(num1,den1,num2,den2); %反馈
s_tf=tf(nums,dens)
p_tf=tf(nump,denp)
c_tf=tf(numc,denc)
f_tf=tf(numf,denf)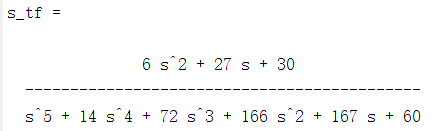
最后
以上就是魁梧胡萝卜最近收集整理的关于控制系统Matlab仿真——数学模型的全部内容,更多相关控制系统Matlab仿真——数学模型内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复