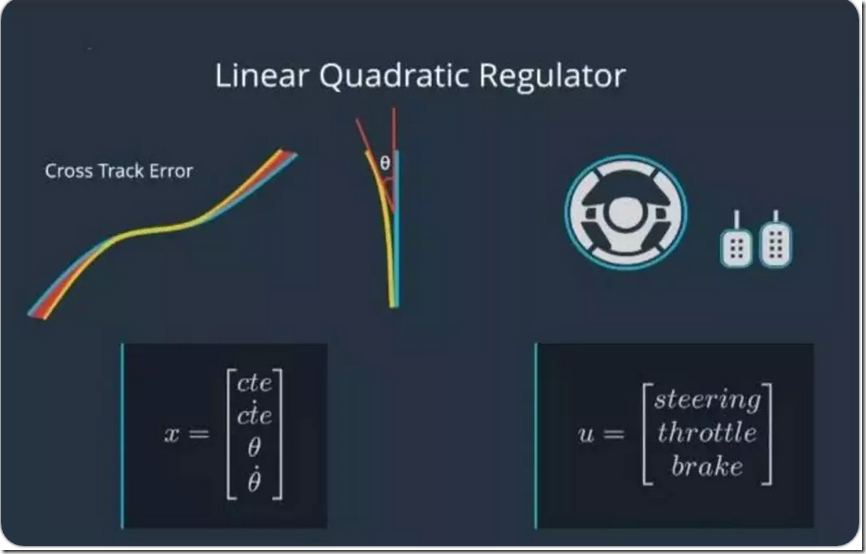
基于动力学模型的LQR前提假设:
1,小角度转向,故规划路径的曲率不能变化过快;
2,认为车速恒定,故加速度不能过大或过小,加速度尽可能小;
LQR算法的输入:
1,整车参数:用于求解LQR模块所需的A,B矩阵
2,车辆实时状态参数:速度,质心坐标,航向角,方向盘转角
3,规划的离散轨迹点参数:坐标,航向角,曲率
LQR算法的输出:
LQR算法的计算过程:
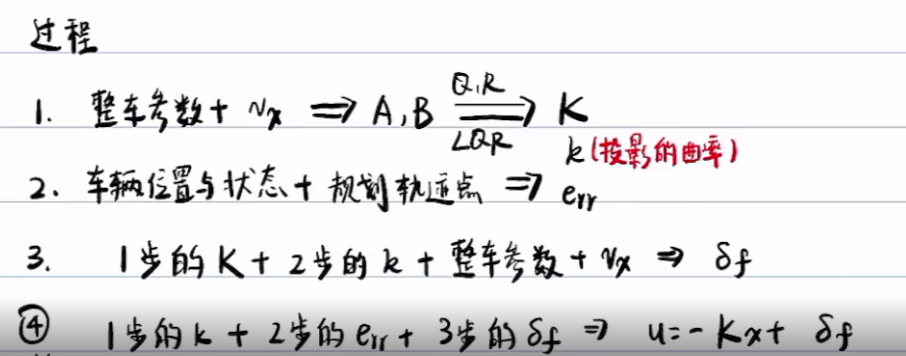
*注:其中的曲率k不一定是投影点曲率,而是目标点曲率,
目标点可能有3种情况:1,最近点;2,投影点;3,根据前视距离所确定的目标点。*
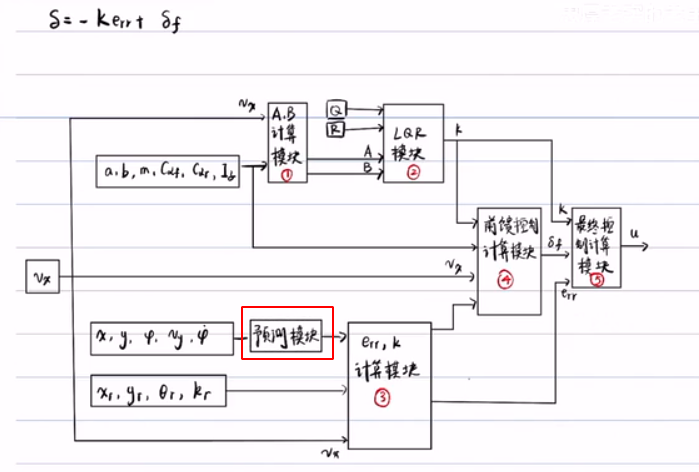
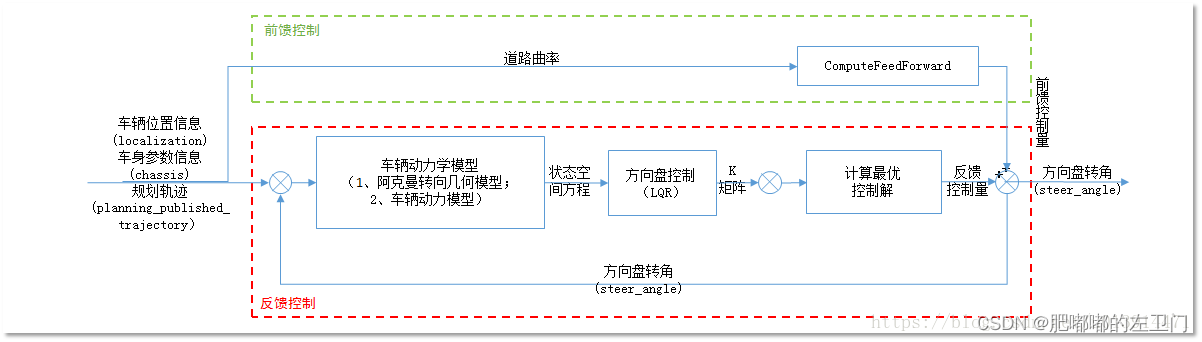
LQR横向控制算法主要有3个关键模块:
1,LQR模块:求解反馈矩阵K;
2,横向误差计算模块:求解误差的状态变量Error;
3,前馈模块:补偿道路曲率对稳态误差的影响,消除稳态误差。
则最终的方向盘转角为:
一、 LQR模块:求解反馈矩阵K
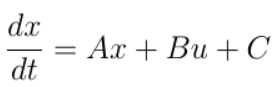
车辆动力学模型状态方程:
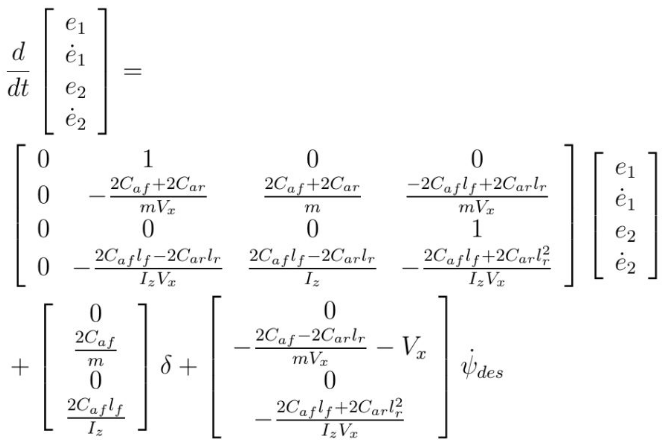
令:
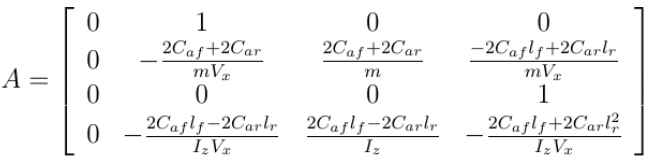
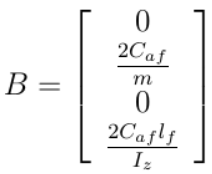
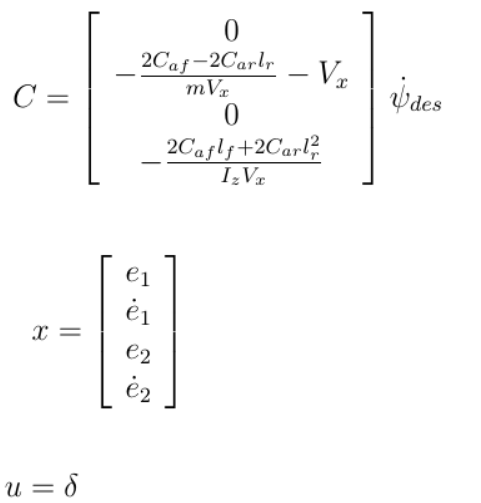
则可得到状态方程为:
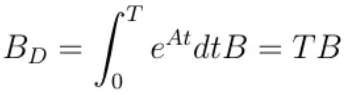
但因为需要使用计算机进行数值计算,推导截至到上面的连续模型还不够,还需要对上述模型进行近似离散化,近似离散化后的模型为:

其中:

![]()
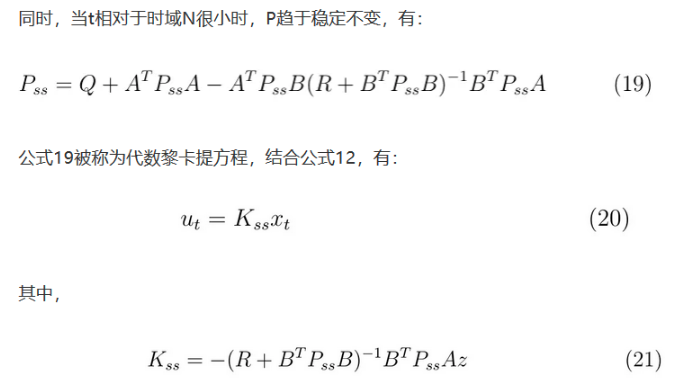
故,在工程中,LQR算法的求解过程可以总结为4步:
1,令P等于状态权重矩阵;
2,迭代黎卡提方程求出新的P;
3,当两次P的差值足够小时,计算反馈矩阵K;,
4,根据反馈矩阵K获取最优控制量u;
bool LQRSolver(const Eigen::MatrixXd &AD, const Eigen::MatrixXd &BD,
const Eigen::MatrixXd &Q, const Eigen::MatrixXd &R,
const double tolerance,
const unsigned int max_num_iteration,
Eigen::MatrixXd &ptr_K, unsigned int &out_iteration_num,
double &out_err) {
Eigen::MatrixXd P = Q; // init P=S=Q P(k)
std::ostringstream ss;
ss << "G Matrix" << AD << std::endl;
ss << "H Matrix" << BD << std::endl;
ss << "Q Matrix" << Q << std::endl;
ss << "R Matrix" << R << std::endl;
// NM_DEBUG(ss.str());
Eigen::MatrixXd AD_T = AD.transpose();
Eigen::MatrixXd BD_T = BD.transpose();
unsigned int iteration_num = 0;
double err = std::numeric_limits<double>::max();
clock_t t;
t = clock();
NM_DEBUG("lqr--before solve");
while (err > tolerance && iteration_num < max_num_iteration) {
iteration_num++;
Eigen::MatrixXd P_MO =
Q +
AD_T * P * (AD - BD * (R + BD_T * P * BD).inverse() * BD_T * P * AD);
err = fabs((P_MO - P).maxCoeff());
P = P_MO;
}
NM_DEBUG("lqr--end solve {}", iteration_num);
out_iteration_num = iteration_num;
out_err = err;
if (iteration_num >= max_num_iteration) {
NM_ERROR("Over iterate ERR= {}", err);
t = clock() - t;
NM_DEBUG_STREAM("It took me " << (static_cast<double>(t) / CLOCKS_PER_SEC)
<< " seconds");
return false;
} else {
ptr_K = (R + BD.transpose() * P * BD).inverse() * BD.transpose() * P * AD;
return true;
}
}
二,横向误差计算模块:求解误差状态变量Error;

4个元素分别为:
1,横向位置误差lateral_error(重点及难点);
2,横向位置误差变化率lateral_error_rate;
3,航向误差heading_error;
3,航向误差变化率heading_error_rate;
1,横向位置偏差的求解方法解析(重点即难点)
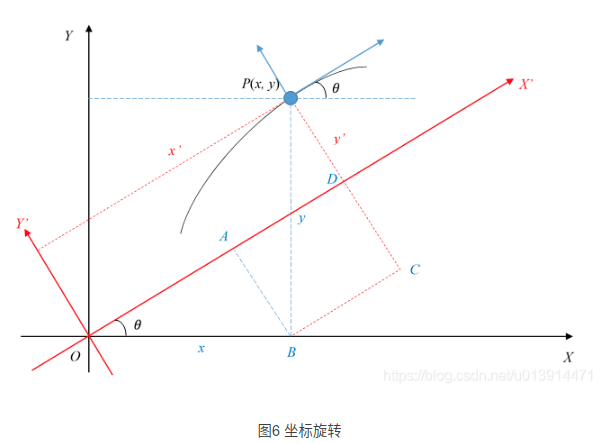
基础知识:二维坐标系转换
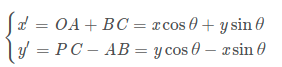
在坐标系XOY下点P的坐标为(x,y),将XOY坐标系逆时针旋转θ角度后得到新坐标系X* O Y*,则点P在新坐标系下的坐标为:
横纵向位置偏差跟期望目标点的方向有关,故工程应用中均是在Frenet坐标系下求取横纵向位置偏差的值,故涉及笛卡尔坐标系与Frenet坐标的转换
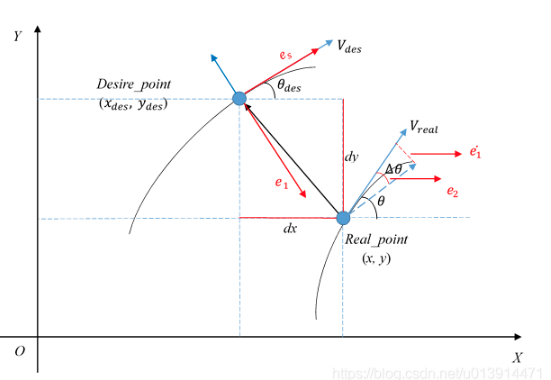
首先,在笛卡尔坐标系中,参考点与真实点间在X、Y轴方向的误差:

由上述二维坐标转换的公式可知:

代码如下,横纵向误差求解代码表述有异,但殊途同归:
// 横向控制
const double dx = x - target_point.path_point().x();
const double dy = y - target_point.path_point().y();
const double cos_target_heading = std::cos(target_point.path_point().theta());
const double sin_target_heading = std::sin(target_point.path_point().theta());
double lateral_error = cos_target_heading * dy - sin_target_heading * dx;
2,横向位置偏差变化率,航向角偏差,航向角偏差变化率的求解方法解析
航向角偏差 = 车辆实际航向角 - 目标点航向角;
横向位置偏差变化率 = 线速度 × sin(航向角偏差);
航向角偏差变化率 = 车辆实际角速度 - 目标点角速度。
double heading_error =
common::angles::normalize_angle(theta - model_state.reference_yaw);
double lateral_error_dot = linear_v * std::sin(heading_error);
double target_heading_rate =
target_waypoint.curvature() * target_waypoint.velocity();
double heading_error_rate = angular_v - target_heading_rate;
至此状态变量X得以求解。
三、前馈模块:根据公式求解即可
当车辆在曲线道路上行驶时,并不能完全消除跟踪误差,因此引入和道路曲率相关的前馈控制器以帮助消除跟踪误差,输入量只有一个曲率,计算公式如下(公式出处:Vehicle Dynamics and Control 第3章,该章节对方向盘控制做了详解):

其中, K_V为不足转向梯度,表征了车辆的转向特性

代码如下:
const double kv =
lr_ * mass_ / 2 / cf_ / wheelbase_ - lf_ * mass_ / 2 / cr_ / wheelbase_;
const double steer_angle_feedforward =
(wheelbase_ * ref_curvature + kv * v * v * ref_curvature -
matrix_k_(0, 2) *
(lr_ * ref_curvature -
lf_ / (2*cr_) - mass_ * v * v * ref_curvature / wheelbase_));
四、至此,根据如下公式算出最终的方向盘转角:
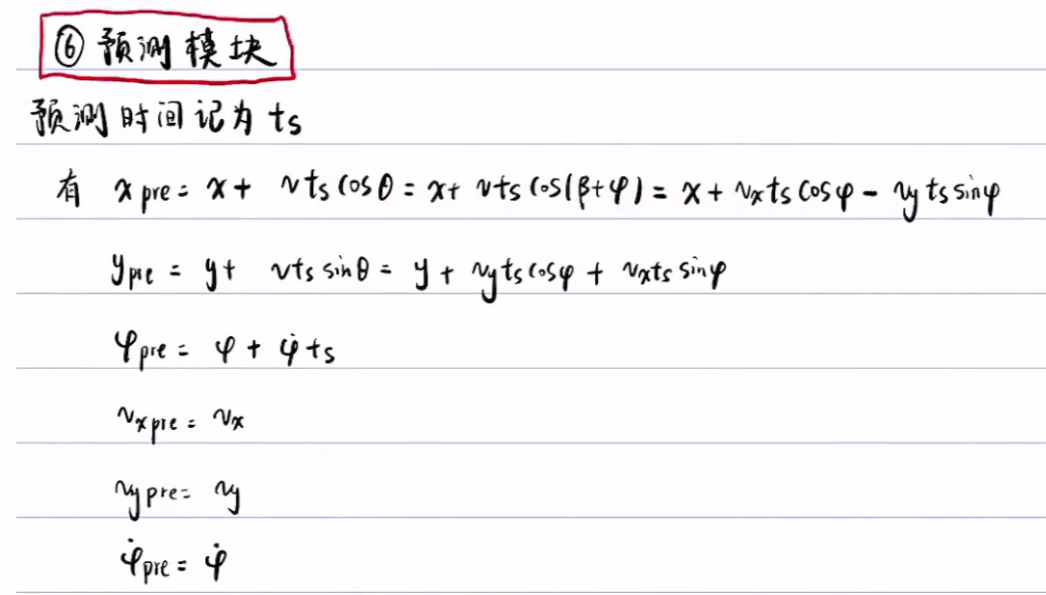
优化提高篇:预测模块,考虑控制的延时以及车辆的惯性,可提高横向控制的精度
根据车辆实时方向盘角度的大小不同,预测的处理方式不同:
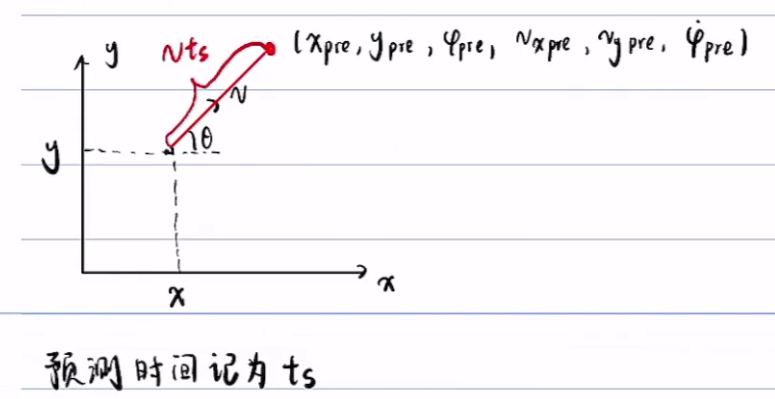
1,当方向盘角度较小时,可以近似认为预测时段内车辆是匀速直线运动,一般是中高速城市场景下
2,当方向盘角度较大时,可以近似认为预测时段内车辆是匀速圆弧运动,一般是低速泊车场景
以下以匀速直线运动为例,列举预测模块的预测模型:
最后
以上就是动人花瓣最近收集整理的关于Apollo代码解析Lateral Control:横向控制算法与流程图(基于动力学模型的LQR)LQR算法的输入:LQR算法的输出:LQR算法的计算过程:LQR横向控制算法主要有3个关键模块:优化提高篇:预测模块,考虑控制的延时以及车辆的惯性,可提高横向控制的精度以下以匀速直线运动为例,列举预测模块的预测模型:的全部内容,更多相关Apollo代码解析Lateral内容请搜索靠谱客的其他文章。








发表评论 取消回复