一、相机的选型
1、分辨率
假设检测一个物体的表面划痕,要求拍摄的物体大小为10*8mm,要求的检测精度是0.01mm。首先假设我们要拍摄的视野范围在12*10mm,那么相机的最低分辨应该选择为:
(12/0.01)*(10/0.01)=1200*1000,约为120万像素的相机。
也就是说一个像素对应一个检测的缺陷的话,那么最低分辨率必须不少于120万像素,但市面上常见的是130万像素的相机,因此一般而言是选用130万像素的相机。但实际问题是,如果一个像素对应一个缺陷的话,那么这样的系统一定会极不稳定,因为随便的一个干扰像素都可能被误认为缺陷,所以我们为了提高系统的精准度和稳定性,最好取缺陷的面积在3到4个像素以上,这样我们选择的相机也就在130万乘3以上,即最低不能少于300万像素,通常采用300万像素的相机为最佳。
2、芯片
工业相机从芯片上分,有CCD和CMOS两种。如果要求拍摄的物体是运动的,要处理的对象也是实时运动的物体,那么当然选择CCD芯片的相机最为适宜。
3、色彩
如果我们要处理的是与图像颜色有关,那当然是采用彩色相机,否则建议你用黑白的,因为黑白的同样分辨率的相机,精度比彩色高。
4、帧率
根据要检测的速度,选择相机的帧率一定要大于或等于检测速度,等于的情况就是你处理图像的时间一定要快,一定要在相机的曝光和传输的时间内完成。
5、曝光时间,如何拍摄运动的物体
运动速度和曝光时间是直接影响拖影的两个因素。为了保证图像中的拖影不超过s单位像素,则需要做到如下等价说法:
- 芯片上光学成像在曝光时间内移动的位置不超过s单位像素
- 物体与成像系统之间在曝光时间内相对移动(垂直于光轴平面内)距离不超过s单位的系统精度
例如:某系统的拍摄精度是0.1mm/像素,相机曝光时间是1/2000秒,拍摄物体运动速度是10mm/s,这样目标在曝光时间内物体运动的距离是0.005mm<<0.1mm,因此可以用该系统拍摄。
已知:确定每一次检测的范围为80mm×60mm,200万像素CCD相机(1600×1200),相机或产品运动速度为12m/min=200mm/s
曝光时间计算步骤:
曝光时间<长边视野范围/(长边像素值*产品运动速度)
=80mm/(1600×200mm/s)
=1/4000s=0.00025s
故曝光时间要小于0.00025s,图像才不会拖影。
二、镜头的选型
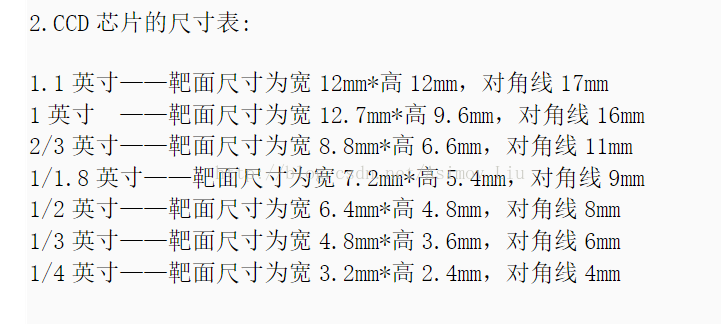
1、选择镜头接口和最大CCD尺寸
镜头接口只要可跟相机接口匹配安装或可通过外加转换口匹配安装就可以了;镜头可支持最大CCD尺寸赢大于等于选配相机CCD芯片尺寸。正常的 1英寸=25.4mm,CCD相机沿用的 1英寸=16mm 且为对角线长度。
2、选择镜头焦距
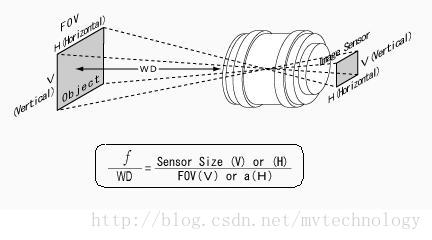
如图所示,在已知相机CCD尺寸、工作距离(WD)、视野(FOV)的情况下,可以计算出所需镜头的焦距(f)。
3、选择镜头光圈
镜头的光圈大小决定图片的亮度,在拍摄告诉运动物体、曝光时间很短的应用中,应该选用大光圈镜头,以提高图像亮度。
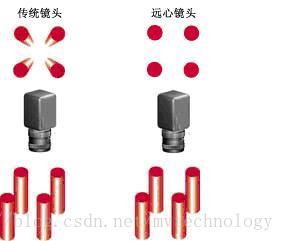
4、选择远心镜头
远心镜头是为纠正传统镜头的时差而特殊设计的镜头,他可以在一定的物距范围内,是得到的图像放大倍率不会随物距的变化而变化。远心镜头与传统镜头对比,如图:
最后
以上就是秀丽老虎最近收集整理的关于OpenCV3历程(6)——工业相机和镜头的选型的全部内容,更多相关OpenCV3历程(6)——工业相机和镜头内容请搜索靠谱客的其他文章。








发表评论 取消回复