系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
- 系列文章目录
- 前言
- 一、感知模块的理解
- 1.环境感知
- 传感器sensor
- 目标检测detection
- 目标分割segmentation
- 目标预测prediction
- 地图Mapping
- 2.机器人/无人驾驶车辆自身感知
- 定位location
- 二、规划模块
- 1.导航任务规划Mission Planning
- 2.执行行为决策规划Behavioral Planning
- 3.运动规划Motion Planning
- 三、控制模块
- 1、move_base的DWA_planner充当控制器
- 2、PID控制器
- 3、纯跟踪pure_persuit控制器
- 4、模型预测控制MPC控制器
- 5、二次优化LQR控制器
- 总结--机器人开发方向
- (1)运动控制路线
- (2)路径规划导航路线
- (3)定位建图导航路线
- (4)视觉目标定位检测感知路线
- (5)人机交互方向路线
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对无人驾驶车/机器人的基本导航软件系统框架做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
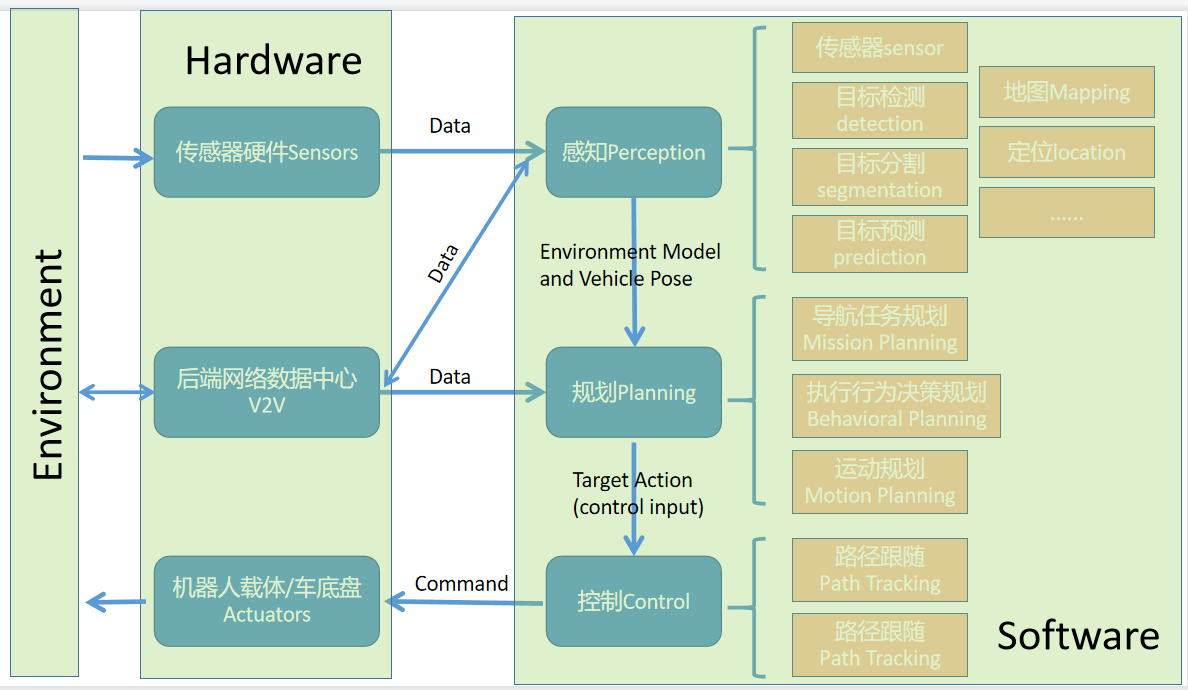
无人驾驶系统的核心可以概述为三个部分:感知(Perception),规划(Planning)和控制(Control),无人驾驶软件系统实际上是一个分层的结构,感知规划和控制工作在不同的层当时相互作用。
一、感知模块的理解
具体相关算法科看看我感知的专栏
https://blog.csdn.net/qq_35635374/category_11464719.html
定位的专栏
https://blog.csdn.net/qq_35635374/category_11464501.html
地图的专栏
https://blog.csdn.net/qq_35635374/category_11464370.html
状态估计与传感器融合专栏
https://blog.csdn.net/qq_35635374/category_11464733.html
感知再我看来,分为环境感知和机器人/无人驾驶车辆自身感知两部分
1.环境感知
环境感知(Environmental Perception)特指对于环境的场景理解能力
传感器sensor
传感器相关原理及算法原件研发,无人车通常是通过融合激光雷达(Lidar),相机(Camera),毫米波雷达(Millimeter Wave Radar)等多种传感器的数据来获取这些信息
.
目标检测detection
障碍物的位置,道路标志/标记的检测
道路的检测包含对道路线的检测(Lane Detection),可行驶区域的检测(Drivable Area Detection);道路上路标的检测包含对其他车辆的检测(Vehicle Detection),行人检测(Pedestrian Detection),交通标志和信号的检测(Traffic Sign Detection)等所有交通参与者的检测和分类。
.
目标分割segmentation
行人车辆的检测等数据的语义分类
.
目标预测prediction
预测行人车辆有限时间内的动作
.
地图Mapping
对环境几何特征的描述
.
2.机器人/无人驾驶车辆自身感知
定位location
定位(Localization)也是感知的一部分,定位是无人车确定其相对于环境的位置的能力。
无人车需要知道自己相对于环境的一个确切位置,这里的定位不能存在超过10cm的误差,试想一下,如果我们的无人车定位误差在30厘米,那么这将是一辆非常危险的无人车(无论是对行人还是乘客而言),因为无人驾驶的规划和执行层并不知道它存在30厘米的误差,它们仍然按照定位精准的前提来做出决策和控制,那么对某些情况作出的决策就是错的,从而造成事故。由此可见,无人车需要高精度的定位
.
.
二、规划模块
具体相关算法科看看我的业务任务决策专栏
https://blog.csdn.net/qq_35635374/category_11508978.html
运动规划专栏
https://blog.csdn.net/qq_35635374/category_11464578.html
1.导航任务规划Mission Planning
对于无人驾驶车来说可以是高速巡航任务、红绿灯转弯任务、自动泊车任务等等
对于农业无人车来说,可以是覆盖式路径巡航任务、两点快速返航文物等等
.
.
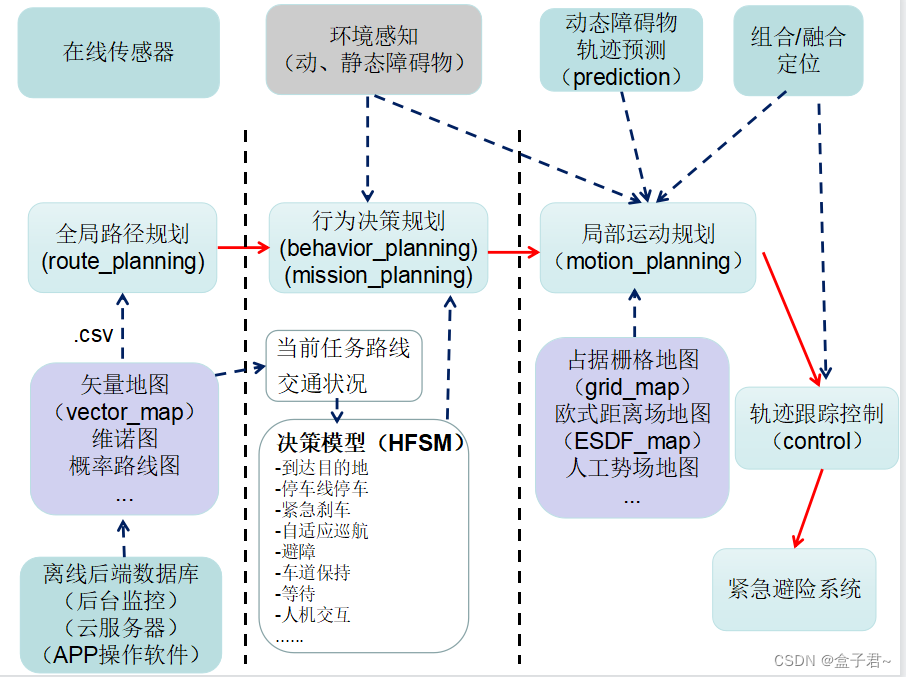
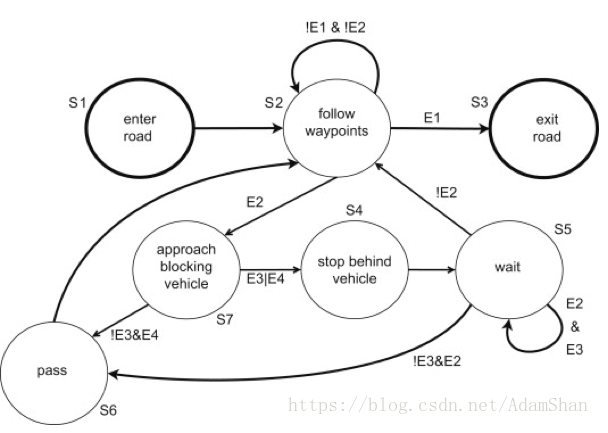
2.执行行为决策规划Behavioral Planning
我对于执行行为决策规划Behavioral Planning 的理解:就是处理导航任务过程中各个状态及状态转移,我一般用有限状态机FSM处理,简单又好用,如在巡航过程之中突然遇到障碍物,需要启动停障避障的功能
.
.
3.运动规划Motion Planning
这个目标通常是指从出发地到达目的地,同时避免障碍物,并且不断优化驾驶轨迹和行为以保证乘客的安全舒适
运动规划Motion Planning我是用高飞这套思想理解的,运动规划Motion Planning分为前端的路径规划和后端的轨迹优化
.
.
三、控制模块
具体相关算法科看看我的控制专栏
https://blog.csdn.net/qq_35635374/category_11464513.html
控制层作为无人车系统的最底层,其任务是将我们规划好的动作实现,所以控制模块的评价指标即为控制的精准度。控制系统内部会存在测量,控制器通过比较车辆的测量和我们预期的状态输出控制动作,这一过程被称为反馈控制(Feedback Control)
常用的方法有以下几种
1、move_base的DWA_planner充当控制器
.
2、PID控制器
.
3、纯跟踪pure_persuit控制器
.
4、模型预测控制MPC控制器
.
5、二次优化LQR控制器
…
.
总结–机器人开发方向
(1)运动控制路线
具体请看我博客控制专栏的相关文章~
1、机械结构追求
1、仿生
2、变结构(轮足相结合)
3、电驱体积微型化或者液压载重
2、电控硬件追求
我们通过在大扭矩、高精度、轻量化的伺服关节以及配套的小型化、低功耗、高实时性主控系统方面重点发力打造出稳定可靠、
自主研发以及成本可控的机器人软硬件平台。
1、稳定性
2、高带宽通讯架构
3、长续航,无线充电
3、运动控制算法追求
1、柔性控制
2、稳定性控制
3、高动态控制
4、运动功能控制器追求
1、对角步态全向移动
2、四足支撑三轴不偶合转动、双轴耦合转动
3、倾斜平面IMU自稳定
4、摔倒后自己判断姿势,决策方案进行起立
5、侧向力干扰力稳定
6、地形坡度记忆及自学习
7、机械狗上搭载机械臂
8、摆脱遥控器的束缚
5、单独模块化追求
(2)路径规划导航路线
具体请看我博客规划与决策专栏的相关文章~
1、决策规划
2、运动规划
(3)定位建图导航路线
具体请看我博客定位与建图专栏的相关文章~
1、定位的方法
2、建图的方法
(4)视觉目标定位检测感知路线
具体请看我博客感知的相关文章~
1、目标检测与定位(针对物体,深度学习视觉yolo)
2、目标追踪与跟踪
3、人脸识别
4、手势识别
(5)人机交互方向路线
语音交互(科大讯飞)
最后
以上就是称心早晨最近收集整理的关于【基础导航软件架构】无人驾驶车/机器人的基本导航软件系统框架(自己总结)系列文章目录前言一、感知模块的理解二、规划模块三、控制模块总结–机器人开发方向的全部内容,更多相关【基础导航软件架构】无人驾驶车/机器人内容请搜索靠谱客的其他文章。








发表评论 取消回复