V2X 地图
定义:地图消息。由路侧单元广播,向车辆传递局部区域的地图信息。包括局部区域的路口信息、路段信息、车道信息,道路之间的连接关系等。单个地图消息可以包含多个路口或区域的地图数据。路口处的信号灯信息则在 SPAT 消息中详细定义。
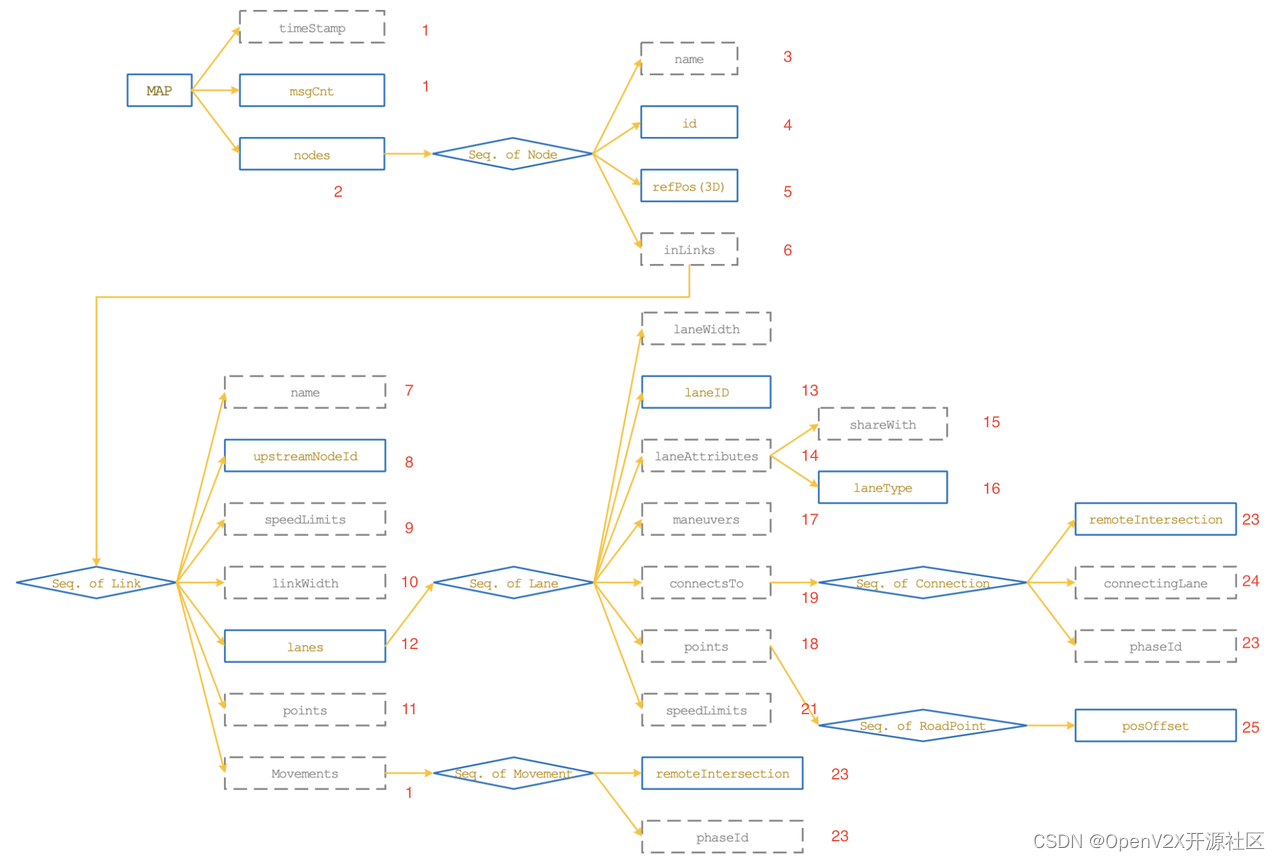
MAP 消息的主体结构,是一个层层嵌套的形式。其中实线框为必有项,虚线框为可选项。
示例文件
{
"msgCnt": "1",
// MsgCount
"nodes": {
"Node": [ // NodeList
// Node
{
"name": "YiZhuang-QuanQu", // DescriptiveName
"id": { //NodeReferenceID
"region": "10", // RoadRegulatorID
"id": "19" // NodeID
},
"refPos": { // Position3D
"lat": "397870006", // Latitude
"long": "1165119042", // Longitude
"elevation": "0" // Elevation
},
"inLinks": {
"Link": [ //LinkList
// Link
{
"name": "18-19", // DescriptiveName
"upstreamNodeId": { // NodeReferenceID
"region": "10",
"id": "18"
},
"speedLimits": {
"RegulatorySpeedLimit": [ // SpeedLimitList,
// RegulatorySpeedLimit
{
"type": { // SpeedLimitType
"vehicleMaxSpeed": null
},
"speed": "833" // Speed
}
]
},
"linkWidth": "660", // LaneWidth
"points": {
"RoadPoint": [ // PointList
// RoadPoint
{
"posOffset": { // PositionOffsetLLV
"offsetLL": { //PositionOffsetLL
"position-LatLon": { // Position-LLmD-64b
"lon": "1165142774", // Longitude
"lat": "397841165" // Latitude
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165129744",
"lat": "397857197"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120283",
"lat": "397868872"
}
}
}
}
]
},
"lanes": {
"Lane": [ // LaneList
// Lane
{
"laneID": "1", // LaneID
"laneWidth": "330", // LaneWidth
"laneAttributes": { // LaneAttributes
"shareWith": "0000000000", // LaneSharing
"laneType": { // LaneTypeAttributes
"vehicle": "00000000"
}
},
"maneuvers": "110000000000", // AllowedManeuvers
"connectsTo": {
"Connection": [ // ConnectsToList
// Connection
{
"remoteIntersection": { // NodeReferenceID
"region": "10",
"id": "12"
},
"connectingLane": { // ConnectingLane
"lane": "1", // LaneID
"maneuver": "010000000000" // AllowedManeuvers
},
"phaseId": "7" // PhaseID
},
{
"remoteIntersection": {
"region": "10",
"id": "20"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "6"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165142774",
"lat": "397841165"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165129744",
"lat": "397857197"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120283",
"lat": "397868872"
}
}
}
}
]
}
},
{
"laneID": "2",
"laneWidth": "330",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "001000000000",
"connectsTo": {
"Connection": {
"remoteIntersection": {
"region": "10",
"id": "29"
},
"connectingLane": {
"lane": "1",
"maneuver": "001000000000"
},
"phaseId": "8"
}
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165142774",
"lat": "397841165"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165129744",
"lat": "397857197"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120622",
"lat": "397869034"
}
}
}
}
]
}
}
]
}
},
{
"name": "12-19",
"upstreamNodeId": {
"region": "10",
"id": "12"
},
"speedLimits": {
"RegulatorySpeedLimit": {
"type": {
"vehicleMaxSpeed": null
},
"speed": "833"
}
},
"linkWidth": "800",
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165093456",
"lat": "397857496"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165102631",
"lat": "397862082"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117219",
"lat": "397869139"
}
}
}
}
]
},
"lanes": {
"Lane": [
{
"laneID": "1",
"laneWidth": "400",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "110000000000",
"connectsTo": {
"Connection": [
{
"remoteIntersection": {
"region": "10",
"id": "20"
},
"connectingLane": {
"lane": "1",
"maneuver": "010000000000"
},
"phaseId": "17"
},
{
"remoteIntersection": {
"region": "10",
"id": "29"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "16"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165093456",
"lat": "397857496"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165102631",
"lat": "397862082"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117219",
"lat": "397869139"
}
}
}
}
]
}
},
{
"laneID": "2",
"laneWidth": "400",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "101000000000",
"connectsTo": {
"Connection": [
{
"remoteIntersection": {
"region": "10",
"id": "29"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "16"
},
{
"remoteIntersection": {
"region": "10",
"id": "18"
},
"connectingLane": {
"lane": "1",
"maneuver": "001000000000"
},
"phaseId": "18"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165093858",
"lat": "397856990"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165102839",
"lat": "397861774"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117469",
"lat": "397868830"
}
}
}
}
]
}
}
]
}
},
{
"name": "20-19",
"upstreamNodeId": {
"region": "10",
"id": "20"
},
"speedLimits": {
"RegulatorySpeedLimit": {
"type": {
"vehicleMaxSpeed": null
},
"speed": "833"
}
},
"linkWidth": "660",
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165095240",
"lat": "397899027"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165105845",
"lat": "397885982"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117636",
"lat": "397871423"
}
}
}
}
]
},
"lanes": {
"Lane": [
{
"laneID": "1",
"laneWidth": "330",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "110000000000",
"connectsTo": {
"Connection": [
{
"remoteIntersection": {
"region": "10",
"id": "29"
},
"connectingLane": {
"lane": "1",
"maneuver": "010000000000"
},
"phaseId": "27"
},
{
"remoteIntersection": {
"region": "10",
"id": "18"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "26"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165095240",
"lat": "397899027"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165105845",
"lat": "397885982"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117636",
"lat": "397871423"
}
}
}
}
]
}
},
{
"laneID": "2",
"laneWidth": "330",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "001000000000",
"connectsTo": {
"Connection": {
"remoteIntersection": {
"region": "10",
"id": "12"
},
"connectingLane": {
"lane": "1",
"maneuver": "001000000000"
},
"phaseId": "28"
}
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165095240",
"lat": "397899027"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165105845",
"lat": "397885982"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165117292",
"lat": "397871274"
}
}
}
}
]
}
}
]
}
},
{
"name": "129-19",
"upstreamNodeId": {
"region": "10",
"id": "29"
},
"speedLimits": {
"RegulatorySpeedLimit": {
"type": {
"vehicleMaxSpeed": null
},
"speed": "833"
}
},
"linkWidth": "780",
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165153657",
"lat": "397887241"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165136723",
"lat": "397878978"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120695",
"lat": "397871234"
}
}
}
}
]
},
"lanes": {
"Lane": [
{
"laneID": "1",
"laneWidth": "390",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "110000000000",
"connectsTo": {
"Connection": [
{
"remoteIntersection": {
"region": "10",
"id": "18"
},
"connectingLane": {
"lane": "1",
"maneuver": "010000000000"
},
"phaseId": "37"
},
{
"remoteIntersection": {
"region": "10",
"id": "12"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "36"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165153657",
"lat": "397887241"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165136723",
"lat": "397878978"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120695",
"lat": "397871234"
}
}
}
}
]
}
},
{
"laneID": "2",
"laneWidth": "390",
"laneAttributes": {
"shareWith": "0000000000",
"laneType": {
"vehicle": "00000000"
}
},
"maneuvers": "101000000000",
"connectsTo": {
"Connection": [
{
"remoteIntersection": {
"region": "10",
"id": "12"
},
"connectingLane": {
"lane": "1",
"maneuver": "100000000000"
},
"phaseId": "36"
},
{
"remoteIntersection": {
"region": "10",
"id": "20"
},
"connectingLane": {
"lane": "1",
"maneuver": "001000000000"
},
"phaseId": "38"
}
]
},
"points": {
"RoadPoint": [
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165153184",
"lat": "397887780"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165136426",
"lat": "397879247"
}
}
}
},
{
"posOffset": {
"offsetLL": {
"position-LatLon": {
"lon": "1165120459",
"lat": "397871540"
}
}
}
}
]
}
}
]
}
}
]
}
}
]
}
}-
上述示例中注释为数据类型,参考下述数据帧、数据元素。
-
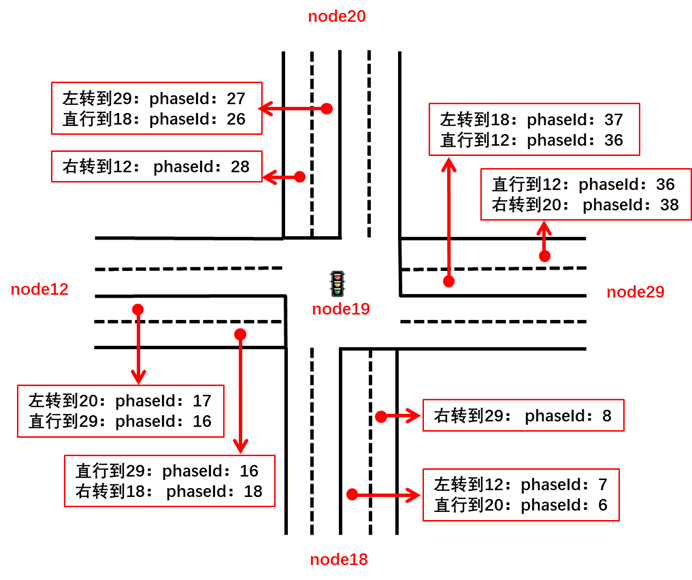
根据示例,初步画出路口图为:
-
问题:目前根据标准无法确定如何画出弧形路口。
数据帧、数据元素
-
MinuteOfTheYear
数值用来表示当前年份,已经过去的总分钟数(UTC时间)。其分辨率为1分钟。该数值配合DSecond数值,则可以表示以毫秒记的全年已过去的总时间。
MinuteOfTheYear ::= INTEGER (0..527040)
-- the value 527040 shall be used for invalid-
DSecond
定义1分钟内的毫秒级时刻。分辨率为1 ms,有效范围是0~59999。60000及以上表示未知或无效数值。
DSecond ::= INTEGER (0..65535)
-- units of milliseconds-
MsgCount
发送方为自己发送的同类消息,依次进行编号。编号数值为0~127,循环使用。该数据字段用于接收方对来自同一发送方的同一类消息,进行连续收包的监控和丢包的统计。
MsgCount ::= INTEGER (0..127)-
NodeList
定义地图节点列表。
NodeList ::= SEQUENCE (SIZE(1..63)) OF Node-
Node
地图节点。节点是地图的最基本组成部分,可以是交叉路口,也可以是一个路段的端点。在地图上,顺序的两个节点确定一条有向路段。节点属性包括名称、ID、位置以及节点相连的上游路段集合。一个节点中包含的路段,均以该节点作为下游端点。而从该节点出发的路段,则归属于路段下游节点的数据中。Node数据帧中,refPos字段用来提供当前数据帧作用范围内的参考三维位置坐标,帧中所有的位置偏移量,均基于该参考坐标计算。真实位置坐标等于偏移量加上参考坐标。
Node ::= SEQUENCE {
-- Node can be an intersection, or a road endpoint
name DescriptiveName OPTIONAL,
-- Node name
id NodeReferenceID,
-- A globally unique value set,
-- consisting of a regionID and
-- node ID assignment
refPos Position3D,
-- 3D position of the center of this Node.
-- This position is also the reference position for the elements inside
inLinks LinkList OPTIONAL,
-- all the links enter this Node
...
}-
DescriptiveName
定义名称字符串类型。
DescriptiveName ::= IA5String (SIZE(1..63))-
NodeReferenceID
定义节点ID。节点ID是由一个全局唯一的地区ID和一个地区内部唯一的节点ID组成。
NodeReferenceID ::= SEQUENCE {
region RoadRegulatorID OPTIONAL,
-- a globally unique regional assignment value
-- typical assigned to a regional DOT authority
-- the value zero shall be used for testing needs
id NodeID
-- a unique mapping to the node
-- in question within the above region of use
}-
RoadRegulatorID
定义地图中各个划分区域的ID号。数值0仅用于测试。
RoadRegulatorID ::= INTEGER (0..65535)
-- The value zero shall be used for testing only-
NodeID
定义节点ID。路网最基本的构成即节点和节点之间连接的路段。节点可以是路口,也可以是一条路的端点。一个节点的ID在同一个区域内是唯一的。数值0~255预留为测试使用。
NodeID ::= INTEGER (0..65535)
-- The values zero through 255 are allocated for testing purposes
-- Note that the value assigned to a node will be
-- unique within a given regional ID only-
Position3D
三维的坐标位置,经纬度和高程。
Position3D ::= SEQUENCE {
lat Latitude,
-- in 1/10th micro degrees
long Longitude,
-- in 1/10th micro degrees
elevation Elevation OPTIONAL
-- in 10 cm units
}-
Latitude
定义纬度数值,北纬为正,南纬为负。分辨率1e-7°。
Latitude ::= INTEGER (-900000000..900000001)
-- Units of 1/10 micro degree
-- Providing a range of plus-minus 90 degrees-
Longitude
定义经度数值。东经为正,西经为负。分辨率为1e-7°。
Longitude ::= INTEGER (-1799999999..1800000001)
-- Units of 1/10 micro degree
-- Providing a range of plus-minus 180 degrees-
Elevation
定义车辆海拔高程。分辨率为0.1 m。数值-4096表示无效数值。
Elevation ::= INTEGER (-4096..61439)
-- In units of 10 cm steps above or below the reference ellipsoid
-- Providing a range of -409.5 to + 6143.9 meters
-- The value -4096 shall be used when Unknown is to be sent-
LinkList
定义路段列表。
LinkList ::= SEQUENCE (SIZE(1..32)) OF Link-
Link
定义路段。从一个节点到相邻另一个节点的道路称为一个有向路段。其属性包含名称、上游节点ID、限速集合、车道宽度,以及该路段包含的车道集合与交通标志标牌集合。
Link ::= SEQUENCE {
name DescriptiveName OPTIONAL,
-- Link name
upstreamNodeId NodeReferenceID,
-- this link is from upstreamNode to the Node it belongs to
speedLimits SpeedLimitList OPTIONAL,
-- List all the speed limits
linkWidth LaneWidth OPTIONAL,
-- Width of this link
points PointList OPTIONAL,
-- Define road points along the center of this link
movements MovementList OPTIONAL,
-- Define movements at intersection
lanes LaneList,
-- Lanes belong to this link
...
}-
SpeedLimitList
定义路段或车道的限速列表。
SpeedLimitList ::= SEQUENCE (SIZE(1..9)) OF RegulatorySpeedLimit-
RegulatorySpeedLimit
定义限速属性。包括限速类型以及所规定的限制速度。
RegulatorySpeedLimit ::= SEQUENCE {
type SpeedLimitType,
-- The type of regulatory speed which follows
speed Speed
-- The speed in units of 0.02 m/s
-- See Section 11 for converting and translating
-- speed expressed in mph into units of m/s
}-
SpeedLimitType
定义限速类型,指示给出的限速大小对应的参考类型。
SpeedLimitType ::= ENUMERATED {
unknown, -- Speed limit type not available
maxSpeedInSchoolZone, -- Only sent when the limit is active
maxSpeedInSchoolZoneWhenChildrenArePresent, -- Sent at any time
maxSpeedInConstructionZone, -- Used for work zones, incident zones, etc.
-- where a reduced speed is present
vehicleMinSpeed,
vehicleMaxSpeed, -- Regulatory speed limit for general traffic
vehicleNightMaxSpeed,
truckMinSpeed,
truckMaxSpeed,
truckNightMaxSpeed,
vehiclesWithTrailersMinSpeed,
vehiclesWithTrailersMaxSpeed,
vehiclesWithTrailersNightMaxSpeed,
...
}-
Speed
车辆或其他交通参与者的速度大小。分辨率为0.02 m/s。数值8191表示无效数值。
Speed ::= INTEGER (0..8191)
-- Units of 0.02 m/s
-- The value 8191 indicates that
-- speed is unavailable-
LaneWidth
定义车道宽度。分辨率为1 cm。
LaneWidth ::= INTEGER (0..32767)
-- units of 1 cm-
PointList
定义一个有向路段上的中间位置点列表,用来表达路段上截面或片段的特殊属性。列表中所有位置点需按上游至下游顺序排列。
PointList ::= SEQUENCE (SIZE(2..31)) OF RoadPoint
-- At least 2 points of 1 lane
-- entry line and exit line
-- points need to be listed sequentially
-- from upstream to downstream-
RoadPoint
表示完整道路上标记的一个位置点属性。包括相对位置、位置点处路段截面的特殊属性集合、以及该位置点到下游相邻位置点之间局部路段的特殊属性集合。当位置点为路段最下游的点,则其包含的下游截取路段属性为无效数据。
RoadPoint ::= SEQUENCE {
posOffset PositionOffsetLLV,
-- Position offset to the reference position
...
}-
PositionOffsetLLV
定义三维的相对位置(相对经纬度和相对高程)。约定偏差值等于真实值减去参考值。
PositionOffsetLLV ::= SEQUENCE {
offsetLL PositionOffsetLL,
-- offset in lon/lat
offsetV VerticalOffset OPTIONAL
-- offset in elevation
}-
PositionOffsetLL
经纬度偏差,来描述一个坐标点的相对位置。约定偏差值等于真实值减去参考值。提供了 7 种尺度的描述方式。
PositionOffsetLL ::= CHOICE {
-- Locations with LL content Span at the equator when using a zoom of
one:
position-LL1 Position-LL-24B,
-- within +- 22.634554 meters of the reference position
position-LL2 Position-LL-28B,
-- within +- 90.571389 meters of the reference position
position-LL3 Position-LL-32B,
-- within +- 362.31873 meters of the reference position
position-LL4 Position-LL-36B,
-- within +- 01.449308 Kmeters of the reference position
position-LL5 Position-LL-44B,
-- within +- 23.189096 Kmeters of the reference position
position-LL6 Position-LL-48B,
-- within +- 92.756481 Kmeters of the reference position
position-LatLon Position-LLmD-64b
-- node is a Lat/Lon absolute coordinates
-- not a reference position
}-
Position-LL-24B
24比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个12比特的经度、纬度偏差值组成。
Position-LL-24B ::= SEQUENCE {
-- ranges of +- 0.0002047 degrees
-- ranges of +- 22.634554 meters at the equator
lon OffsetLL-B12,
lat OffsetLL-B12
}-
OffsetLL-B12
12比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B12 ::= INTEGER (-2048..2047)
-- A range of +- 0.0002047 degrees
-- Units of 0.1 microdegrees-
Position-LL-28B
28比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个14比特的经度、纬度偏差值组成。
Position-LL-28B ::= SEQUENCE {
-- ranges of +- 0.0008191 degrees
-- ranges of +- 90.571389 meters at the equator
lon OffsetLL-B14,
lat OffsetLL-B14
}-
OffsetLL-B14
14比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B14 ::= INTEGER (-8192..8191)
-- A range of +- 0.0008191 degrees
-- Units of 0.1 microdegrees-
Position-LL-32B
32比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个16比特的经度、纬度偏差值组成。
Position-LL-32B ::= SEQUENCE {
-- ranges of +- 0.0032767 degrees
-- ranges of +- 362.31873 meters at the equator
lon OffsetLL-B16,
lat OffsetLL-B16
}-
OffsetLL-B16
16比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B16 ::= INTEGER (-32768..32767)
-- A range of +- 0.0032767 degrees
-- Units of 0.1 microdegrees-
Position-LL-36B
36比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个18比特的经度、纬度偏差值组成。
Position-LL-36B ::= SEQUENCE {
-- ranges of +- 0.0131071 degrees
-- ranges of +- 01.449308 Kmeters at the equator
lon OffsetLL-B18,
lat OffsetLL-B18
}-
OffsetLL-B18
18比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B18 ::= INTEGER (-131072..131071)
-- A range of +- 0.0131071 degrees
-- Units of 0.1 microdegrees-
Position-LL-44B
44比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个22比特的经度、纬度偏差值组成。
Position-LL-44B ::= SEQUENCE {
-- ranges of +- 0.2097151 degrees
-- ranges of +- 23.189096 Kmeters at the equator
lon OffsetLL-B22,
lat OffsetLL-B22
}-
OffsetLL-B22
22比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B22 ::= INTEGER (-2097152..2097151)
-- A range of +- 0.2097151 degrees
-- Units of 0.1 microdegrees-
Position-LL-48B
48比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个24比特的经度、纬度偏差值组成。
Position-LL-48B ::= SEQUENCE {
-- ranges of +- 0.8388607 degrees
-- ranges of +- 92.756481 Kmeters at the equator
lon OffsetLL-B24,
lat OffsetLL-B24
}-
OffsetLL-B24
24比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B24 ::= INTEGER (-8388608..8388607)
-- A range of +- 0.8388607 degrees
-- Units of 0.1 microdegrees-
Position-LLmD-64b
64比特经纬度位置。实际上,该尺度采用了真实经纬度数据进行描述,非相对位置。
Position-LLmD-64b ::= SEQUENCE {
-- a full 32b Lat/Lon range
lon Longitude,
lat Latitude
}-
VerticalOffset
定义垂直方向位置偏差。提供了7种尺度范围的偏差表示方式。
VerticalOffset ::= CHOICE {
-- Vertical Offset
-- All below in steps of 10cm above or below the reference ellipsoid
offset1 VertOffset-B07, -- with a range of +- 6.3 meters vertical
offset2 VertOffset-B08, -- with a range of +- 12.7 meters vertical
offset3 VertOffset-B09, -- with a range of +- 25.5 meters vertical
offset4 VertOffset-B10, -- with a range of +- 51.1 meters vertical
offset5 VertOffset-B11, -- with a range of +- 102.3 meters vertical
offset6 VertOffset-B12, -- with a range of +- 204.7 meters vertical
elevation Elevation -- with a range of -409.5 to + 6143.9 meters
}-
MovementList
描述一条路段与下游路段的连接关系列表。
MovementList ::= SEQUENCE (SIZE(1..32)) OF Movement-
Movement
描述道路与下游路段的连接关系,以及该连接对应的本地路口处信号灯相位ID。此处的相位ID事实上也是MAP消息与SPAT消息的唯一关联。车辆在确定了转向行为后,能够通过该相位ID数据,查看到SPAT中对应的相位实时状态,从而获得行车过程中的信号灯数据辅助。
Movement ::= SEQUENCE {
remoteIntersection NodeReferenceID,
-- This entry indicates the downstream intersection of the link this lane connects to.
-- This provides a means to create meshes of lanes
phaseId PhaseID OPTIONAL
-- The matching signal group send by
-- the SPAT message for this lane/maneuver.
-- Shall be present unless the connectingLane
-- has no signal group (is un-signalized)
}-
LaneList
定义一个路段中包含的车道列表。
LaneList ::= SEQUENCE (SIZE(1..32)) OF Lane-
Lane
定义车道。包含ID、共享属性、车道出口的允许转向行为、车道与下游路段车道的连接关系列表以及车道中间点列表。
Lane ::= SEQUENCE {
laneID LaneID,
-- The unique ID number assigned
-- to this lane object
laneWidth LaneWidth OPTIONAL,
laneAttributes LaneAttributes OPTIONAL,
-- Define basic attribute of lane
maneuvers AllowedManeuvers OPTIONAL,
-- the permitted maneuvers for this lane
connectsTo ConnectsToList OPTIONAL,
-- connection to downsteam lanes
speedLimits SpeedLimitList OPTIONAL,
-- List all the speed limits
points PointList OPTIONAL,
-- Define road points and segments
...
}-
LaneWidth
定义车道宽度。分辨率为1 cm。
LaneWidth ::= INTEGER (0..32767)
-- units of 1 cm-
LaneAttributes
定义车道属性。包括车道共享情况以及车道本身所属的类别特性。
LaneAttributes ::= SEQUENCE {
shareWith LaneSharing OPTIONAL,
laneType LaneTypeAttributes
}-
LaneSharing
定义车道被共享的情况。在已有的车道属性定义基础上,该数据表示此车道还会有其他的交通参与者者出现,并可能拥有相同的路权。数据中每一位置“1”表示对应的车道共享属性生效。
LaneSharing ::= BIT STRING {
-- With bits as defined:
overlappingLaneDescriptionProvided (0),
-- Assert when another lane object is present to describe the
-- path of the overlapping shared lane
-- this construct is not used for lane objects which simply cross
multipleLanesTreatedAsOneLane (1),
-- Assert if the lane object path and width details represents
-- multiple lanes within it that are not further described
-- Various modes and type of traffic that may share this lane:
otherNonMotorizedTrafficTypes (2), -- horse drawn etc.
individualMotorizedVehicleTraffic (3),
busVehicleTraffic (4),
taxiVehicleTraffic (5),
pedestriansTraffic (6),
cyclistVehicleTraffic (7),
trackedVehicleTraffic (8),
pedestrianTraffic (9)
} (SIZE (10))
-- All zeros would indicate 'not shared' and 'not overlapping-
LaneTypeAttributes
定义不同类别车道的属性集合。
LaneTypeAttributes ::= CHOICE {
vehicle LaneAttributes-Vehicle, -- motor vehicle lanes
crosswalk LaneAttributes-Crosswalk, -- pedestrian crosswalks
bikeLane LaneAttributes-Bike, -- bike lanes
sidewalk LaneAttributes-Sidewalk, -- pedestrian sidewalk paths
median LaneAttributes-Barrier, -- medians & channelization
striping LaneAttributes-Striping, -- roadway markings
trackedVehicle LaneAttributes-TrackedVehicle, -- trains and trolleys
parking LaneAttributes-Parking, -- parking and stopping lanes
...
}-
LaneAttributes-Vehicle
车辆行驶车道的属性定义。用来描述一条车用车道的特殊属性和其允许行驶的汽车种类。
LaneAttributes-Vehicle ::= BIT STRING {
-- With bits as defined:
isVehicleRevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
isVehicleFlyOverLane (1),
-- path of lane is not at grade
hovLaneUseOnly (2),
restrictedToBusUse (3),
restrictedToTaxiUse (4),
restrictedFromPublicUse (5),
hasIRbeaconCoverage (6),
permissionOnRequest (7) -- e.g. to inform about a lane for e-cars
} (SIZE (8,...))-
LaneAttributes-Crosswalk
人行横道的属性定义。指示车道的一系列通过属性和人行辅助设施。
LaneAttributes-Crosswalk ::= BIT STRING {
-- With bits as defined:
-- MUTCD provides no suitable "types" to use here
crosswalkRevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
bicyleUseAllowed (1),
-- The path allows bicycle traffic,
-- if not set, this mode is prohibited
isXwalkFlyOverLane (2),
-- path of lane is not at grade
fixedCycleTime (3),
-- ped walk phases use preset times
-- i.e. there is not a 'push to cross' button
biDirectionalCycleTimes (4),
-- ped walk phases use different SignalGroupID
-- for each direction. The first SignalGroupID
-- in the first Connection represents 'inbound'
-- flow (the direction of travel towards the first
-- node point) while second SignalGroupID in the
-- next Connection entry represents the 'outbound'
-- flow. And use of RestrictionClassID entries
-- in the Connect follow this same pattern in pairs.
hasPushToWalkButton (5),
-- Has a demand input
audioSupport (6),
-- audio crossing cues present
rfSignalRequestPresent (7),
-- Supports RF push to walk technologies
unsignalizedSegmentsPresent (8)
-- The lane path consists of one of more segments
-- which are not part of a signal group ID
-- Bits 9~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-Bike
自行车道的属性定义。
LaneAttributes-Bike ::= BIT STRING {
-- With bits as defined:
bikeRevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
pedestrianUseAllowed (1),
-- The path allows pedestrian traffic,
-- if not set, this mode is prohibited
isBikeFlyOverLane (2),
-- path of lane is not at grade
fixedCycleTime (3),
-- the phases use preset times
-- i.e. there is not a 'push to cross' button
biDirectionalCycleTimes (4),
-- ped walk phases use different SignalGroupID
-- for each direction. The first SignalGroupID
-- in the first Connection represents 'inbound'
-- flow (the direction of travel towards the first
-- node point) while second SignalGroupID in the
-- next Connection entry represents the 'outbound'
-- flow. And use of RestrictionClassID entries
-- in the Connect follow this same pattern in pairs.
isolatedByBarrier (5),
unsignalizedSegmentsPresent (6)
-- The lane path consists of one of more segments
-- which are not part of a signal group ID
-- Bits 7~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-Sidewalk
人行道的属性定义。
LaneAttributes-Sidewalk ::= BIT STRING { -- With bits as defined:
sidewalk-RevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
bicyleUseAllowed (1),
-- The path allows bicycle traffic,
-- if not set, this mode is prohibited
isSidewalkFlyOverLane (2),
-- path of lane is not at grade
walkBikes (3)
-- bike traffic must dismount and walk
-- Bits 4~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-Barrier
车道隔离的属性定义。主要指示车道隔离的物理形式。
LaneAttributes-Barrier ::= BIT STRING {
-- With bits as defined:
median-RevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
median (1),
whiteLineHashing (2),
stripedLines (3),
doubleStripedLines (4),
trafficCones (5),
constructionBarrier (6),
trafficChannels (7),
lowCurbs (8),
highCurbs (9) -- Bits 10~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-Striping
标线车道的属性定义。指示了车道上网纹或者标志标线所传达的道路信息,如禁行、路线标识等,辅助驾驶员通过一些复杂的路口或路段,提高驾驶安全性。
LaneAttributes-Striping ::= BIT STRING {
-- With bits as defined:
stripeToConnectingLanesRevocableLane (0),
-- this lane may be activated or not activated based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
stripeDrawOnLeft (1),
stripeDrawOnRight (2),
-- which side of lane to mark
stripeToConnectingLanesLeft (3),
stripeToConnectingLanesRight (4),
stripeToConnectingLanesAhead (5)
-- the stripe type should be
-- presented to the user visually
-- to reflect stripes in the
-- intersection for the type of
-- movement indicated
-- Bits 6~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-TrackedVehicle
轨道车辆车道的属性定义。用来描述一条轨道车辆车道的特殊属性和其允许行驶的车辆种类。
LaneAttributes-TrackedVehicle ::= BIT STRING {
-- With bits as defined:
spec-RevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
spec-commuterRailRoadTrack (1),
spec-lightRailRoadTrack (2),
spec-heavyRailRoadTrack (3),
spec-otherRailType (4) -- Bits 5~15 reserved and set to zero
} (SIZE (16))-
LaneAttributes-Parking
停车车道的属性定义。指示车道允许停车的种类和停靠方式。
LaneAttributes-Parking ::= BIT STRING {
-- With bits as defined:
-- Parking use details, note that detailed restrictions such as
-- allowed hours are sent by way of ITIS codes in the TIM message
parkingRevocableLane (0),
-- this lane may be activated or not based
-- on the current SPAT message contents
-- if not asserted, the lane is ALWAYS present
parallelParkingInUse (1),
headInParkingInUse (2),
doNotParkZone (3),
-- used to denote fire hydrants as well as
-- short disruptions in a parking zone
parkingForBusUse (4),
parkingForTaxiUse (5),
noPublicParkingUse (6)
-- private parking, as in front of
-- private property
-- Bits 7~15 reserved and set to zero
} (SIZE (16))-
AllowedManeuvers
定义一个(机动车)车道的允许转向行为。
AllowedManeuvers ::= BIT STRING {
-- With bits as defined:
-- Allowed maneuvers at path end (stop line)
-- All maneuvers with bits not set are therefore prohibited
-- A value of zero shall be used for unknown, indicating no Maneuver
76
T/CSAE 53—2020
maneuverStraightAllowed (0),
-- a Straight movement is allowed in this lane
maneuverLeftAllowed (1),
-- a Left Turn movement is allowed in this lane
maneuverRightAllowed (2),
-- a Right Turn movement is allowed in this lane
maneuverUTurnAllowed (3),
-- a U turn movement is allowed in this lane
maneuverLeftTurnOnRedAllowed (4),
-- a Stop, and then proceed when safe movement
-- is allowed in this lane
maneuverRightTurnOnRedAllowed (5),
-- a Stop, and then proceed when safe movement
-- is allowed in this lane
maneuverLaneChangeAllowed (6),
-- a movement which changes to an outer lane
-- on the egress side is allowed in this lane
-- (example: left into either outbound lane)
maneuverNoStoppingAllowed (7),
-- the vehicle should not stop at the stop line
-- (example: a flashing green arrow)
yieldAllwaysRequired (8),
-- the allowed movements above are not protected
-- (example: an permanent yellow condition)
goWithHalt (9),
-- after making a full stop, may proceed
caution (10),
-- proceed past stop line with caution
reserved1 (11)
-- used to align to 12 Bit Field
} (SIZE(12))-
ConnectsToList
定义路段中每条车道,在下游路口处与下游路段中车道的转向连接关系列表。
ConnectsToList ::= SEQUENCE (SIZE(1..16)) OF Connection-
Connection
定义当前车道与下游路段中车道的连接关系。包括下游路段出口节点ID、连接的下游路段车道基本信息以及对应的信号灯相位号。在车道连接中定义的相位号,是对DF_Movement中定义转向的相位号的一个补充。当某一些车道在转向时需要参考一些特殊的信号灯相位(而不是DF_Movement中定义的默认相位),则应该将其定义在本数据帧中。
Connection::= SEQUENCE {
remoteIntersection NodeReferenceID,
-- This entry indicates the downstream intersection of the link this lane connects to.
-- This provides a means to create meshes of lanes
connectingLane ConnectingLane OPTIONAL,
-- The index of the connecting lane and also
-- the maneuver from the current lane to it
-- When we want to list the allowed lanes of the next link
-- this lane can lead to, we use this entry
phaseId PhaseID OPTIONAL
-- The matching signal group send by
-- the SPAT message for this lane/maneuver.
-- Shall be present unless the connectingLane
-- has no signal group (is un-signalized)
}-
ConnectingLane
用于定位上游车道转向连接的下游车道。包括下游车道ID以及该转向的允许行驶行为,下游车道ID的作用范围是该车道所在的路段。
ConnectingLane ::= SEQUENCE {
lane LaneID,
-- Index of the connecting lane
maneuver AllowedManeuvers OPTIONAL
-- The Maneuver between
-- the enclosing lane and this lane
-- at the stop line to connect them
}-
PhaseID
定义信号灯相位ID。数值0表示无效ID。
PhaseID ::= INTEGER (0..255)
-- The value 0 shall be used when the ID is not available or not known*参考标准:CSAE 53-2020 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第一阶段)。
最后
以上就是负责小馒头最近收集整理的关于V2X技术周 | V2X地图数据结构介绍和梳理的全部内容,更多相关V2X技术周内容请搜索靠谱客的其他文章。








发表评论 取消回复