我是靠谱客的博主 呆萌心情,这篇文章主要介绍ArduCopter 3.6.3编译过程waf编译器取代make编译器waf help使用waf体系Tools/ardupilotwaf/ardupilotwaf.py脚本,现在分享给大家,希望可以做个参考。
waf编译器取代make编译器
根据ardupilot/BUILD.md
Ardupilot is gradually moving from the make-based build system to
[Waf](https://waf.io/). The instructions below should be enough for you to
build Ardupilot, but you can also read more about the build system in the
[Waf Book](https://waf.io/book/). //ArduPilot逐渐由make编译转向Waf编译,具体指导见https://waf.io/book/
Waf should always be called from the ardupilot's root directory. Differently
from the make-based build, with Waf there's a configure step to choose the
board to be used (default is `sitl`). //waf编译命令应在"ardupilot/"根目录下,与make编译不同,而且waf第一步是configure命令,选择硬件板类型,默认硬件板是sitl。
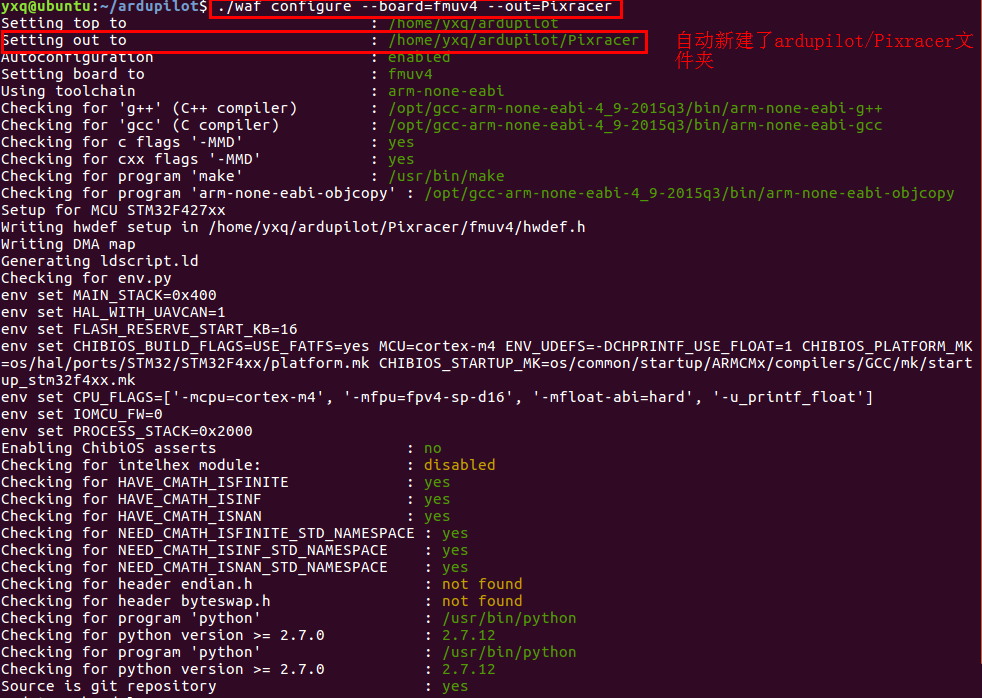
硬件Pixracer,固件ArduCopter,waf编译命令如下:
cd ardupilot
./waf configure --board fmuv4
./waf copter
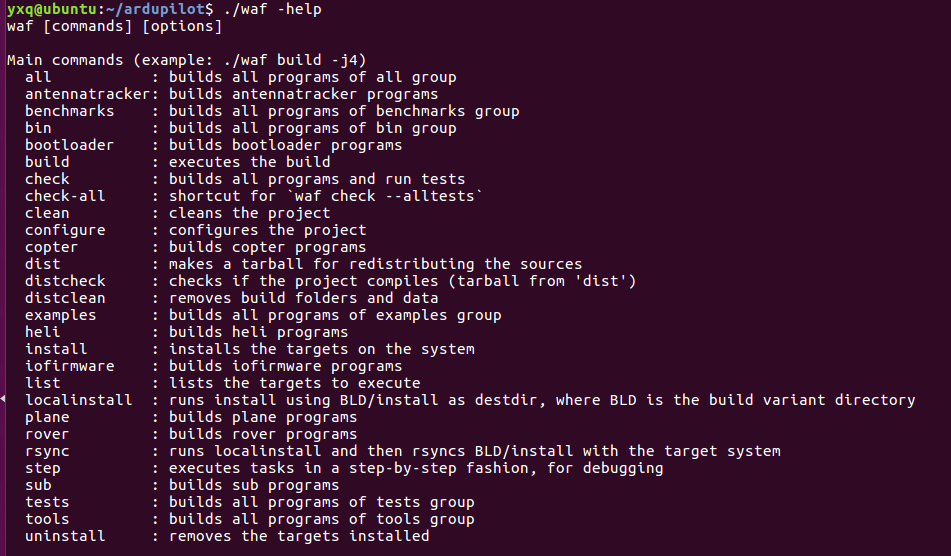
waf help使用
waf [commands] [options]
commands:
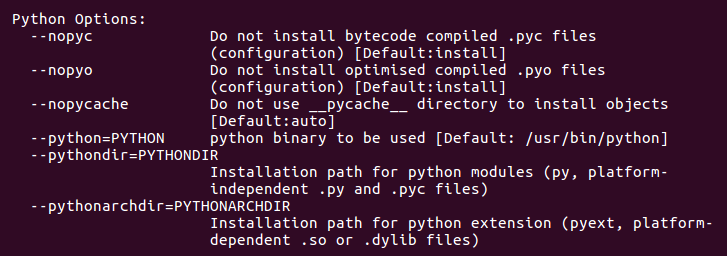
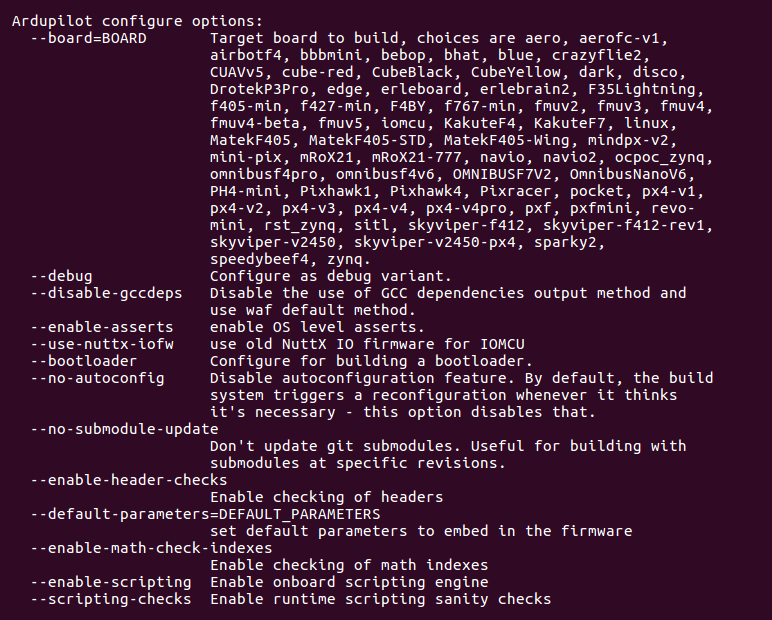
options:
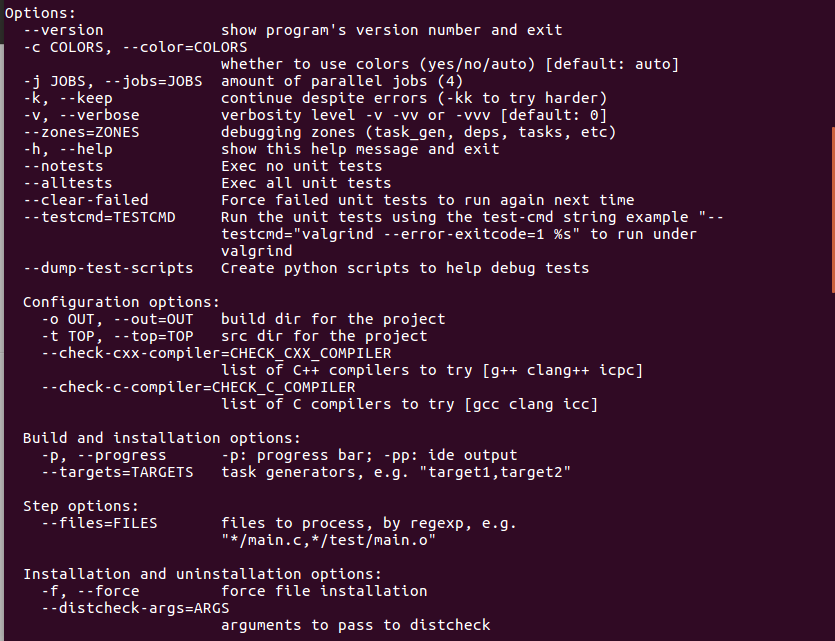
–out=OUT,设置build文件放置在"ardupilot/OUT/"目录下
–debug: 单步打印编译过程信息
–upload: 上传固件至硬件板
waf体系
ardupilot目录下,waf.py、wscript.py 脚本;
ardupilot各级子目录下,都有 wscript.py 脚本;
ardupilot/modules/waf:waf编译器源码;
ardupilot/Tools/ardupilotwaf:
- 配置Pixracer编译环境:
问题是:waf是从哪里开始启动的?
系统最先执行ardupilot/waf.py脚本,直至语句“subprocess.check_call([python,waf_light] + sys.argv[1:])”,该语句启动了多进程,调用其他脚本,例如“ardupilot/wscript.py”。
调试发现:
waf.py启动了wscript.py脚本,wscript.py接连启动了Tools/ardupilotwaf/ardupilotwaf.py和boards.py脚本。
进程结束为最后时刻。
打开ardupilot/wscript.py:
#!/usr/bin/env python
# encoding: utf-8
from __future__ import print_function
import os.path
import sys
sys.path.insert(0, 'Tools/ardupilotwaf/') //sys.path强制插入系统路径“Tools/ardupilotwaf/”
import ardupilotwaf //导入Tools/ardupilotwaf/ardupilotwaf.py脚本
import boards //导入Tools/ardupilotwaf/boards.py脚本
from waflib import Build, ConfigSet, Configure, Context, Utils
//从modules/waf/waflib导入Build.py、ConfigSet.py、Configure.py、Context.py、Utils.py脚本
# TODO: implement a command 'waf help' that shows the basic tasks a
# developer might want to do: e.g. how to configure a board, compile a
# vehicle, compile all the examples, add a new example. Should fit in
# less than a terminal screen, ideally commands should be copy
# pastable. Add the 'export waf="$PWD/waf"' trick to be copy-pastable
# as well.
# TODO: replace defines with the use of the generated ap_config.h file
# this makes recompilation at least when defines change. which might
# be sufficient.
# Default installation prefix for Linux boards
default_prefix = '/usr/'
# Override Build execute and Configure post_recurse methods for autoconfigure purposes
Build.BuildContext.execute = ardupilotwaf.ap_autoconfigure(Build.BuildContext.execute)
Configure.ConfigurationContext.post_recurse = ardupilotwaf.ap_configure_post_recurse()
def _set_build_context_variant(board):
for c in Context.classes:
if not issubclass(c, Build.BuildContext):
continue
c.variant = board
def init(ctx):
env = ConfigSet.ConfigSet()
try:
p = os.path.join(Context.out_dir, Build.CACHE_DIR, Build.CACHE_SUFFIX)
env.load(p)
except EnvironmentError:
return
Configure.autoconfig = 'clobber' if env.AUTOCONFIG else False
board = ctx.options.board or env.BOARD
if not board:
return
# define the variant build commands according to the board
_set_build_context_variant(board)
def options(opt):
opt.load('compiler_cxx compiler_c waf_unit_test python')
opt.load('ardupilotwaf')
opt.load('build_summary')
g = opt.ap_groups['configure']
boards_names = boards.get_boards_names()
g.add_option('--board',
action='store',
choices=boards_names,
default=None,
help='Target board to build, choices are %s.' % ', '.join(boards_names))
g.add_option('--debug',
action='store_true',
default=False,
help='Configure as debug variant.')
g.add_option('--disable-gccdeps',
action='store_true',
default=False,
help='Disable the use of GCC dependencies output method and use waf default method.')
g.add_option('--enable-asserts',
action='store_true',
default=False,
help='enable OS level asserts.')
g.add_option('--use-nuttx-iofw',
action='store_true',
default=False,
help='use old NuttX IO firmware for IOMCU')
g.add_option('--bootloader',
action='store_true',
default=False,
help='Configure for building a bootloader.')
g.add_option('--no-autoconfig',
dest='autoconfig',
action='store_false',
default=True,
help='''Disable autoconfiguration feature. By default, the build system
triggers a reconfiguration whenever it thinks it's necessary - this
option disables that.
''')
g.add_option('--no-submodule-update',
dest='submodule_update',
action='store_false',
default=True,
help='''Don't update git submodules. Useful for building with
submodules at specific revisions.
''')
g.add_option('--enable-header-checks', action='store_true',
default=False,
help="Enable checking of headers")
g.add_option('--default-parameters',
default=None,
help='set default parameters to embed in the firmware')
g.add_option('--enable-math-check-indexes',
action='store_true',
default=False,
help="Enable checking of math indexes")
g.add_option('--enable-scripting', action='store_true',
default=False,
help="Enable onboard scripting engine")
g.add_option('--scripting-checks', action='store_true',
default=True,
help="Enable runtime scripting sanity checks")
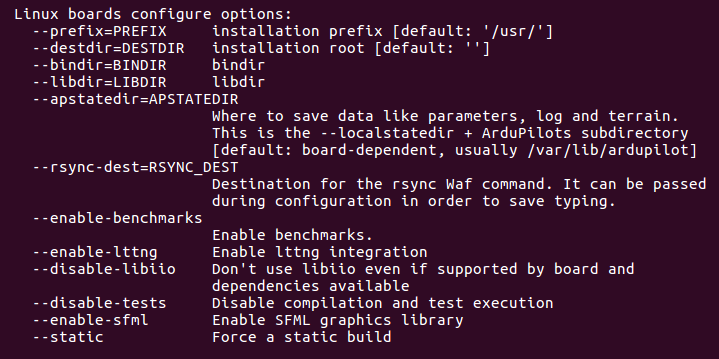
g = opt.ap_groups['linux']
linux_options = ('--prefix', '--destdir', '--bindir', '--libdir')
for k in linux_options:
option = opt.parser.get_option(k)
if option:
opt.parser.remove_option(k)
g.add_option(option)
g.add_option('--apstatedir',
action='store',
default='',
help='''Where to save data like parameters, log and terrain.
This is the --localstatedir + ArduPilots subdirectory [default:
board-dependent, usually /var/lib/ardupilot]''')
g.add_option('--rsync-dest',
dest='rsync_dest',
action='store',
default='',
help='''Destination for the rsync Waf command. It can be passed during
configuration in order to save typing.
''')
g.add_option('--enable-benchmarks',
action='store_true',
default=False,
help='Enable benchmarks.')
g.add_option('--enable-lttng', action='store_true',
default=False,
help="Enable lttng integration")
g.add_option('--disable-libiio', action='store_true',
default=False,
help="Don't use libiio even if supported by board and dependencies available")
g.add_option('--disable-tests', action='store_true',
default=False,
help="Disable compilation and test execution")
g.add_option('--enable-sfml', action='store_true',
default=False,
help="Enable SFML graphics library")
g.add_option('--static',
action='store_true',
default=False,
help='Force a static build')
def _collect_autoconfig_files(cfg):
for m in sys.modules.values():
paths = []
if hasattr(m, '__file__') and m.__file__ is not None:
paths.append(m.__file__)
elif hasattr(m, '__path__'):
for p in m.__path__:
if p is not None:
paths.append(p)
for p in paths:
if p in cfg.files or not os.path.isfile(p):
continue
with open(p, 'rb') as f:
cfg.hash = Utils.h_list((cfg.hash, f.read()))
cfg.files.append(p)
def configure(cfg):
if cfg.options.board is None:
cfg.options.board = 'sitl'
cfg.env.BOARD = cfg.options.board
cfg.env.AUTOCONFIG = cfg.options.autoconfig
_set_build_context_variant(cfg.env.BOARD)
cfg.setenv(cfg.env.BOARD)
cfg.env.BOARD = cfg.options.board
cfg.env.DEBUG = cfg.options.debug
cfg.env.ENABLE_ASSERTS = cfg.options.enable_asserts
cfg.env.BOOTLOADER = cfg.options.bootloader
cfg.env.USE_NUTTX_IOFW = cfg.options.use_nuttx_iofw
cfg.env.OPTIONS = cfg.options.__dict__
# Allow to differentiate our build from the make build
cfg.define('WAF_BUILD', 1)
cfg.msg('Autoconfiguration', 'enabled' if cfg.options.autoconfig else 'disabled')
if cfg.options.static:
cfg.msg('Using static linking', 'yes', color='YELLOW')
cfg.env.STATIC_LINKING = True
cfg.load('ap_library')
cfg.msg('Setting board to', cfg.options.board)
cfg.get_board().configure(cfg)
cfg.load('clang_compilation_database')
cfg.load('waf_unit_test')
cfg.load('mavgen')
cfg.load('uavcangen')
cfg.env.SUBMODULE_UPDATE = cfg.options.submodule_update
cfg.start_msg('Source is git repository')
if cfg.srcnode.find_node('.git'):
cfg.end_msg('yes')
else:
cfg.end_msg('no')
cfg.env.SUBMODULE_UPDATE = False
cfg.msg('Update submodules', 'yes' if cfg.env.SUBMODULE_UPDATE else 'no')
cfg.load('git_submodule')
if cfg.options.enable_benchmarks:
cfg.load('gbenchmark')
cfg.load('gtest')
cfg.load('static_linking')
cfg.load('build_summary')
cfg.start_msg('Benchmarks')
if cfg.env.HAS_GBENCHMARK:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.start_msg('Unit tests')
if cfg.env.HAS_GTEST:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.start_msg('Scripting')
if cfg.options.enable_scripting:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.start_msg('Scripting runtime checks')
if cfg.options.scripting_checks:
cfg.end_msg('enabled')
else:
cfg.end_msg('disabled', color='YELLOW')
cfg.env.append_value('GIT_SUBMODULES', 'mavlink')
cfg.env.prepend_value('INCLUDES', [
cfg.srcnode.abspath() + '/libraries/',
])
cfg.find_program('rsync', mandatory=False)
if cfg.options.rsync_dest:
cfg.msg('Setting rsync destination to', cfg.options.rsync_dest)
cfg.env.RSYNC_DEST = cfg.options.rsync_dest
if cfg.options.enable_header_checks:
cfg.msg('Enabling header checks', cfg.options.enable_header_checks)
cfg.env.ENABLE_HEADER_CHECKS = True
else:
cfg.env.ENABLE_HEADER_CHECKS = False
# TODO: Investigate if code could be changed to not depend on the
# source absolute path.
cfg.env.prepend_value('DEFINES', [
'SKETCHBOOK="' + cfg.srcnode.abspath() + '"',
])
# Always use system extensions
cfg.define('_GNU_SOURCE', 1)
cfg.write_config_header(os.path.join(cfg.variant, 'ap_config.h'))
_collect_autoconfig_files(cfg)
def collect_dirs_to_recurse(bld, globs, **kw):
dirs = []
globs = Utils.to_list(globs)
if bld.bldnode.is_child_of(bld.srcnode):
kw['excl'] = Utils.to_list(kw.get('excl', []))
kw['excl'].append(bld.bldnode.path_from(bld.srcnode))
for g in globs:
for d in bld.srcnode.ant_glob(g + '/wscript', **kw):
dirs.append(d.parent.relpath())
return dirs
def list_boards(ctx):
print(*boards.get_boards_names())
def board(ctx):
env = ConfigSet.ConfigSet()
try:
p = os.path.join(Context.out_dir, Build.CACHE_DIR, Build.CACHE_SUFFIX)
env.load(p)
except:
print('No board currently configured')
return
print('Board configured to: {}'.format(env.BOARD))
def _build_cmd_tweaks(bld):
if bld.cmd == 'check-all':
bld.options.all_tests = True
bld.cmd = 'check'
if bld.cmd == 'check':
if not bld.env.HAS_GTEST:
bld.fatal('check: gtest library is required')
bld.options.clear_failed_tests = True
def _build_dynamic_sources(bld):
if not bld.env.BOOTLOADER:
bld(
features='mavgen',
source='modules/mavlink/message_definitions/v1.0/ardupilotmega.xml',
output_dir='libraries/GCS_MAVLink/include/mavlink/v2.0/',
name='mavlink',
# this below is not ideal, mavgen tool should set this, but that's not
# currently possible
export_includes=[
bld.bldnode.make_node('libraries').abspath(),
bld.bldnode.make_node('libraries/GCS_MAVLink').abspath(),
],
)
if bld.get_board().with_uavcan or bld.env.HAL_WITH_UAVCAN==True:
bld(
features='uavcangen',
source=bld.srcnode.ant_glob('modules/uavcan/dsdl/uavcan/**/*.uavcan'),
output_dir='modules/uavcan/libuavcan/include/dsdlc_generated',
name='uavcan',
export_includes=[
bld.bldnode.make_node('modules/uavcan/libuavcan/include/dsdlc_generated').abspath(),
]
)
def write_version_header(tsk):
bld = tsk.generator.bld
return bld.write_version_header(tsk.outputs[0].abspath())
bld(
name='ap_version',
target='ap_version.h',
vars=['AP_VERSION_ITEMS'],
rule=write_version_header,
)
bld.env.prepend_value('INCLUDES', [
bld.bldnode.abspath(),
])
def _build_common_taskgens(bld):
# NOTE: Static library with vehicle set to UNKNOWN, shared by all
# the tools and examples. This is the first step until the
# dependency on the vehicles is reduced. Later we may consider
# split into smaller pieces with well defined boundaries.
bld.ap_stlib(
name='ap',
ap_vehicle='UNKNOWN',
ap_libraries=bld.ap_get_all_libraries(),
)
if bld.env.HAS_GTEST:
bld.libgtest(cxxflags=['-include', 'ap_config.h'])
if bld.env.HAS_GBENCHMARK:
bld.libbenchmark()
def _build_recursion(bld):
common_dirs_patterns = [
# TODO: Currently each vehicle also generate its own copy of the
# libraries. Fix this, or at least reduce the amount of
# vehicle-dependent libraries.
'*',
'Tools/*',
'libraries/*/examples/*',
'libraries/*/tests',
'libraries/*/utility/tests',
'libraries/*/benchmarks',
]
common_dirs_excl = [
'modules',
'libraries/AP_HAL_*',
'libraries/SITL',
]
hal_dirs_patterns = [
'libraries/%s/tests',
'libraries/%s/*/tests',
'libraries/%s/*/benchmarks',
'libraries/%s/examples/*',
]
dirs_to_recurse = collect_dirs_to_recurse(
bld,
common_dirs_patterns,
excl=common_dirs_excl,
)
if bld.env.IOMCU_FW is not None:
if bld.env.IOMCU_FW:
dirs_to_recurse.append('libraries/AP_IOMCU/iofirmware')
for p in hal_dirs_patterns:
dirs_to_recurse += collect_dirs_to_recurse(
bld,
[p % l for l in bld.env.AP_LIBRARIES],
)
# NOTE: we need to sort to ensure the repeated sources get the
# same index, and random ordering of the filesystem doesn't cause
# recompilation.
dirs_to_recurse.sort()
for d in dirs_to_recurse:
bld.recurse(d)
def _build_post_funs(bld):
if bld.cmd == 'check':
bld.add_post_fun(ardupilotwaf.test_summary)
else:
bld.build_summary_post_fun()
if bld.env.SUBMODULE_UPDATE:
bld.git_submodule_post_fun()
def _load_pre_build(bld):
'''allow for a pre_build() function in build modules'''
brd = bld.get_board()
if getattr(brd, 'pre_build', None):
brd.pre_build(bld)
def build(bld):
config_hash = Utils.h_file(bld.bldnode.make_node('ap_config.h').abspath())
bld.env.CCDEPS = config_hash
bld.env.CXXDEPS = config_hash
bld.post_mode = Build.POST_LAZY
bld.load('ardupilotwaf')
bld.env.AP_LIBRARIES_OBJECTS_KW.update(
use=['mavlink'],
cxxflags=['-include', 'ap_config.h'],
)
_load_pre_build(bld)
if bld.get_board().with_uavcan:
bld.env.AP_LIBRARIES_OBJECTS_KW['use'] += ['uavcan']
_build_cmd_tweaks(bld)
if bld.env.SUBMODULE_UPDATE:
bld.add_group('git_submodules')
for name in bld.env.GIT_SUBMODULES:
bld.git_submodule(name)
bld.add_group('dynamic_sources')
_build_dynamic_sources(bld)
bld.add_group('build')
bld.get_board().build(bld)
_build_common_taskgens(bld)
_build_recursion(bld)
_build_post_funs(bld)
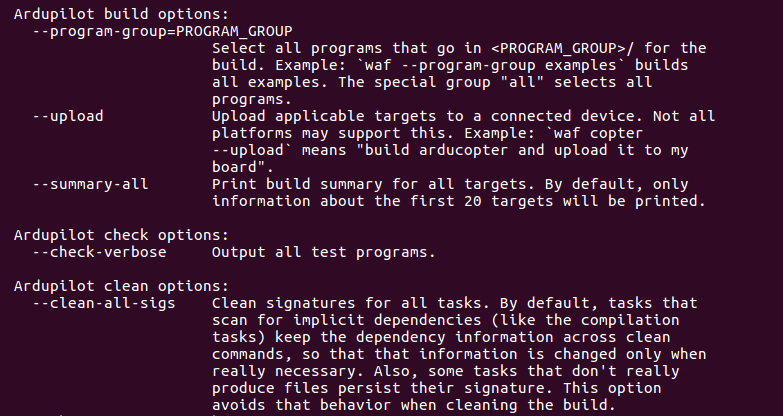
ardupilotwaf.build_command('check',
program_group_list='all',
doc='builds all programs and run tests',
)
ardupilotwaf.build_command('check-all',
program_group_list='all',
doc='shortcut for `waf check --alltests`',
)
for name in ('antennatracker', 'copter', 'heli', 'plane', 'rover', 'sub', 'bootloader','iofirmware'):
ardupilotwaf.build_command(name,
program_group_list=name,
doc='builds %s programs' % name,
)
for program_group in ('all', 'bin', 'tools', 'examples', 'tests', 'benchmarks'):
ardupilotwaf.build_command(program_group,
program_group_list=program_group,
doc='builds all programs of %s group' % program_group,
)
class LocalInstallContext(Build.InstallContext):
"""runs install using BLD/install as destdir, where BLD is the build variant directory"""
cmd = 'localinstall'
def __init__(self, **kw):
super(LocalInstallContext, self).__init__(**kw)
self.local_destdir = os.path.join(self.variant_dir, 'install')
def execute(self):
old_destdir = self.options.destdir
self.options.destdir = self.local_destdir
r = super(LocalInstallContext, self).execute()
self.options.destdir = old_destdir
return r
class RsyncContext(LocalInstallContext):
"""runs localinstall and then rsyncs BLD/install with the target system"""
cmd = 'rsync'
def __init__(self, **kw):
super(RsyncContext, self).__init__(**kw)
self.add_pre_fun(RsyncContext.create_rsync_taskgen)
def create_rsync_taskgen(self):
if 'RSYNC' not in self.env:
self.fatal('rsync program seems not to be installed, can't continue')
self.add_group()
tg = self(
name='rsync',
rule='${RSYNC} -a ${RSYNC_SRC}/ ${RSYNC_DEST}',
always=True,
)
tg.env.RSYNC_SRC = self.local_destdir
if self.options.rsync_dest:
self.env.RSYNC_DEST = self.options.rsync_dest
if 'RSYNC_DEST' not in tg.env:
self.fatal('Destination for rsync not defined. Either pass --rsync-dest here or during configuration.')
tg.post()
Tools/ardupilotwaf/ardupilotwaf.py脚本
最后
以上就是呆萌心情最近收集整理的关于ArduCopter 3.6.3编译过程waf编译器取代make编译器waf help使用waf体系Tools/ardupilotwaf/ardupilotwaf.py脚本的全部内容,更多相关ArduCopter内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复