Main.m
% headpose_with_block/ini_shape
clc;clearvars;close all;
data=load('../data_temp/data.mat','data');
data=data.data;
meanshape=calc_meanshape2(data);
ind=1;
img=imread(data{ind}.imgPath);%color image
landmark=data{ind}.landmark;%landmark 10*2,其中landmark的坐标是相对于box的偏移
nlandmark=size(landmark,1);% n=10
box=data{ind}.bbox;%[x y w h]
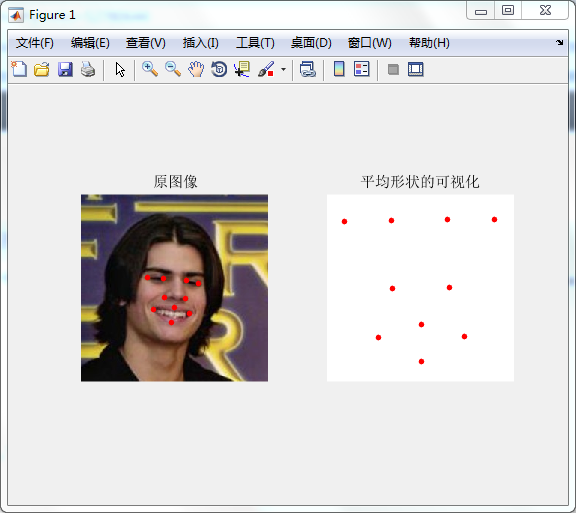
figure(1);
subplot(1,2,1);
imshow(img);
title('原图像');
hold on;
for i=1:nlandmark
plot(landmark(i,1)+box(1),landmark(i,2)+box(2),'.r','markersize',15);
end
%显示平均形状
minxy=min(meanshape,[],1);
maxxy=max(meanshape,[],1);
shape=meanshape.*80+10;%尺度扩大80,+10是为平移到中间位置
img2=255*ones(100,100,3);
subplot(1,2,2);
imshow(img2);
title('平均形状的可视化');
hold on;
for i=1:nlandmark
plot(shape(i,1),shape(i,2),'.r','markersize',15);
end
%% 计算相似变换
%%计算两个中心化的形状之间的相似变换
meanxy=mean(landmark,1);%landmark的中心
mean_shapexy=mean(meanshape,1);%meanshape的中心
temp1=bsxfun(@minus,landmark,meanxy);
temp2=bsxfun(@minus,meanshape,mean_shapexy).*100;%放置到100*100的标准框架中
%from meanshape to landmark,计算相似变换矩阵
%理论上,令T=trans_mat.T,T(3,1)=T(3,2)=0,即T中的tx=ty=0
trans_mat = fitgeotrans(bsxfun(@minus,meanshape,mean_shapexy).*100,bsxfun(@minus,landmark,meanxy), 'NonreflectiveSimilarity');
T=trans_mat.T;
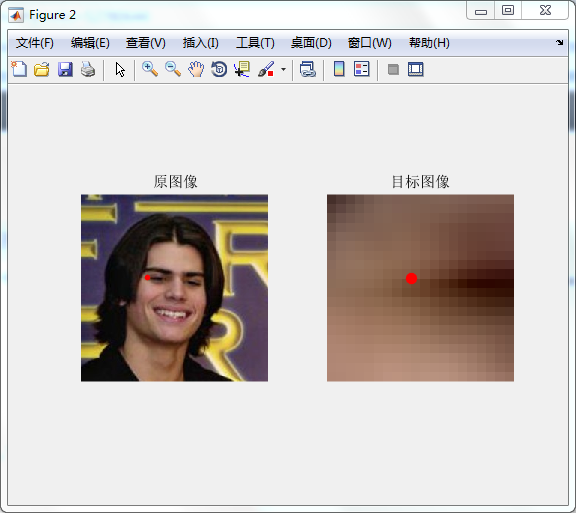
wsize=[20 20];%目标的大小
T2=zeros(2,3);
T2(1,1)=T(1,1);
T2(1,2)=T(2,1);
T2(2,1)=T(1,2);
T2(2,2)=T(2,2);
T2(1,3)=landmark(1,1)+box(1)-(T2(1,1)*(wsize(1)-1)/2+T2(1,2)*(wsize(2)-1)/2);
T2(2,3)=landmark(1,2)+box(2)-(T2(2,1)*(wsize(1)-1)/2+T2(2,2)*(wsize(2)-1)/2);
%仿射逆变换,T2是从wsize窗口到图像中的仿射变换,其和trans_mat是统一的。
result=cv.warpAffine(img,T2,'DSize',wsize,'WarpInverse',1);
figure(2);
subplot(1,2,1);
imshow(img);
title('原图像');
hold on;
plot(landmark(1,1)+box(1),landmark(1,2)+box(2),'.r','markersize',15);
subplot(1,2,2);
imshow(result);
title('目标图像');
hold on;
plot((wsize(1)-1)/2,(wsize(2)-1)/2,'.r','markersize',30);
计算公式:
(x′−xiy′−yi)=(a1b1a2b2)(x−wcxy−wcy)
其中 xi=landmark(1,1),yj=landmark(1,2) , x′,y′ 是关于图像img中的坐标, x,y 是关于大小为wsize的目标图像中的坐标。 wcx和wcy 表示目标图像的中心。
通过上面的公式,我们分离 x′,y′,x,y 即可得到相似变换矩阵为:
(x′y′)=(a1b1a2b2xi−(a1wcx+a2wcy)yi−(b1wcx+b2wcy))⎛⎝⎜xy1⎞⎠⎟
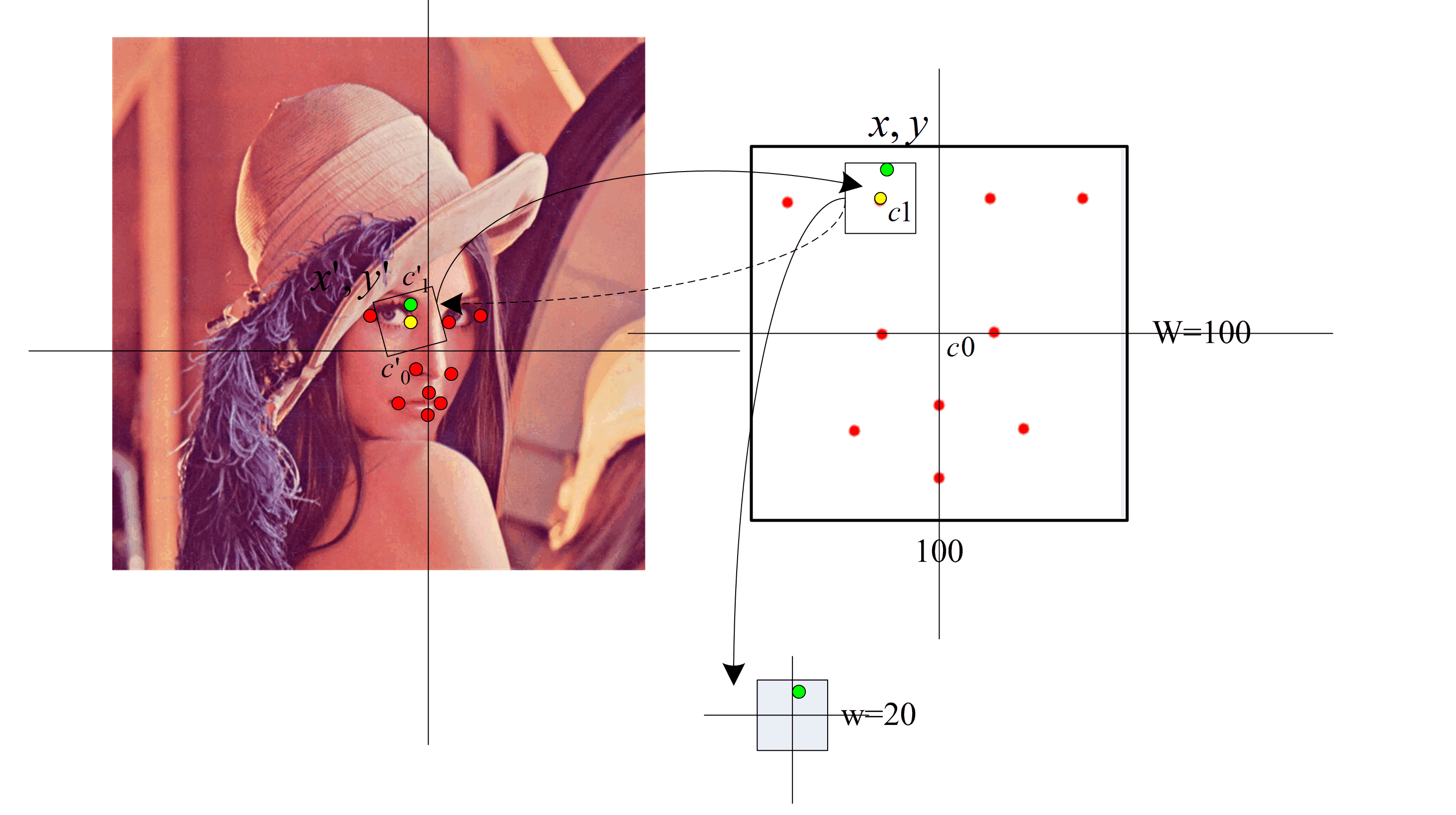
如上图,左右图像分别给出了坐标轴。左图:人脸图像给出了10个基准点,黄色的点是其中的一个基准点,绿色的点为以黄色点为中心的邻域内的一点。 c′0 是10个基准点的重心(质心),也是图中坐标系的原点。右图:给出了一个大小为100*100的框架,并将平均人脸映射到该框架内进行了可视化。同样的 c0 是中心, c1 是其中的一个基准点。
假定左图像绿色点的坐标为 (x′,y′) ,右边图像绿色点的坐标为 (x,y)
证明:
(x′−x′c′0y′−y′c′0)=(a1b1a2b2)(x−xc0y−yc0)
可以推出:
(x′−x′c′1y′−y′c′1)=(a1b1a2b2)(x−xc1y−yc1)
注释:隐含条件:
(x′c′1−x′c0y′c′1−y′c0)=(a1b1a2b2)(xc1−xc0yc1−yc0)
备注:因为上面是相似变换,因此满足:
a1=b2,a2=−b1
OpenCV和Matlab
OpenCV中计算形式为:
(x′y′)=(ab−batxty)⎛⎝⎜xy1⎞⎠⎟=To⎛⎝⎜xy1⎞⎠⎟
Matlab中的计算形式为:
(x′y′)=(xy1)⎛⎝⎜a−btxbaty001⎞⎠⎟=(xy1)Tm
最后
以上就是清秀身影最近收集整理的关于相似变换Main.mOpenCV和Matlab的全部内容,更多相关相似变换Main内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复