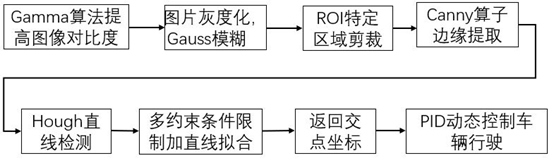
针对自动驾驶系统的实际需求,我们需要一种能够兼顾速度、不同环境下高检测成功率和鲁棒性的车道识别算法。首先,因为停车场更多的是地下光线昏暗的情况需要提高车道线与周围环境的对比度,然后灰度化图像进行模糊降噪处理。因为摄像头相对于车身是固定的所以只需根据特定位置进行处理。通过边缘提取获取特征线,以多约束条件限制获取车道线坐标位置传送给控制单元。由控制单元执行PID算法实时控制车辆根据地面车道线循迹寻找车位。
Gamma校正
因为人眼对外界光源的感光值与输入光强不是呈线性指数关系的。在低照度下,人眼更容易分辨出亮度的变化,随着照度的增加,人眼不易分辨出亮度的变化。而摄像机感光与输入光强呈线性关系。为了使摄像机能像人眼一样拥有灰暗环境或光线反射较强的情况下颜色的识别度,需要将摄像机采集的图像进行Gamma校正。

当γ小于1时,imageinput越小,增强效果越明显,当γ大于1时,imageinput越大,增强效果越明显。


图像灰度化并高斯模糊
通常情况下,车道线为白色或黄色线条,与图像中的路面以及其他车辆等背景形成明显差别。为保持R,G,B三通道的平衡性,将灰度值
最后
以上就是无私世界最近收集整理的关于基于opencv+python的车道检测技术的全部内容,更多相关基于opencv+python内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复