object detection作为计算机视觉的四大任务之一,在工业界有着重要作用,本文主要阐述基于深度学习的目标检测的三大阶段:以rcnn系列为代表的two-stage目标检测和以yolo ssd等为代表的的one-stage目标检测以及最新流行的anchor-free思想目标检测。
先附上四篇老师推荐我读的综述:
Imbalance Problems in Object Detection: A Review
intro: under review at TPAMI
arXiv: https://arxiv.org/abs/1909.00169
Recent Advances in Deep Learning for Object Detection
intro: From 2013 (OverFeat) to 2019 (DetNAS)
arXiv: https://arxiv.org/abs/1908.03673
A Survey of Deep Learning-based Object Detection
intro:From Fast R-CNN to NAS-FPN
arXiv:https://arxiv.org/abs/1907.09408
Object Detection in 20 Years: A Survey
intro:This work has been submitted to the IEEE TPAMI for possible publication
arXiv:https://arxiv.org/abs/1905.05055
two-stage
优点:准确度高,回归做的好
缺点:检测速度慢
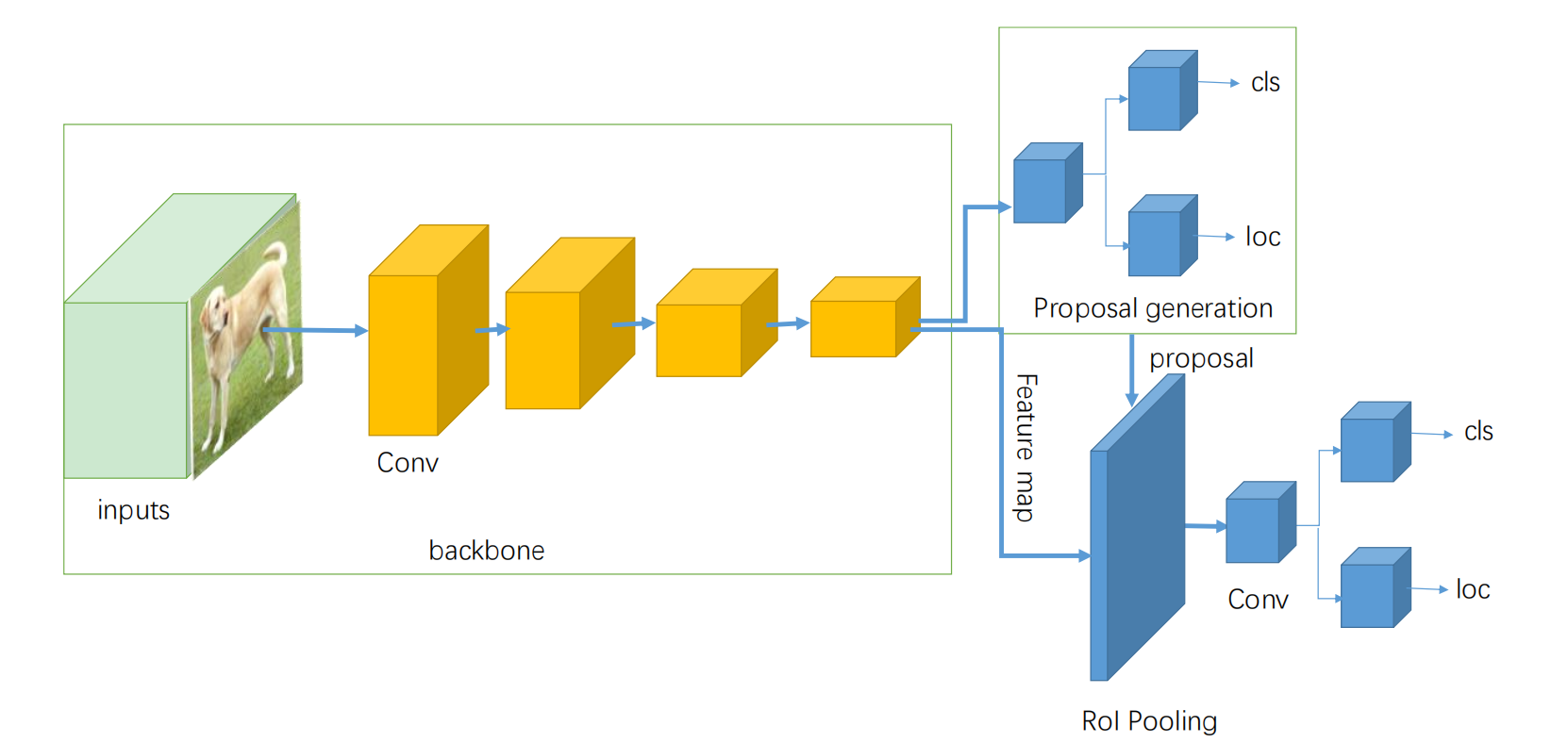
代表作有rcnn系列,原理是将目标检测分为两个阶段。第一个阶段是通过一系列算法,提取图片的特征,寻找可能存在目标的区域,这些算法有selective search、rpn、fpn等,第二阶段通过roi等算法进行分类和回归,如图1.
具体的two-stage框架可以参考:
https://blog.csdn.net/v_JULY_v/article/details/80170182
one-stage
优点:检测速度快
缺点:准确率相比two-stage有一定差距
以yolo v1的问世,标志着one-stage的开始,yolo从v1-v3不断改进,现在在工业界用途最广。从v2开始它借鉴了faster-rcnn的anchor机制,one-stage大部分也采用了anchor机制,通过backbone的特征提取,在特征图上使用anchor,每一个特征点上抛出k个bb(v2是5个,v3采用聚类,采用9个bb)。
详见:https://blog.csdn.net/xd1723138323/article/details/82532973
ssd是另一种流行的One-stage算法,它采用多尺度映射来产生特征。
详见:https://blog.csdn.net/ytusdc/article/details/86577939
此外,还有很多非常好的one-stage的算法,如M2Det RefineDet Dcnv2
anchor-free
其实anchor-free也是属于one-stage的,但是因为他的检测方式是使用keypoint,可以说是one-stage中独辟蹊径,现在的检测结果已经明显优于以往的算法。目前比较流行的此类算法有cornernet centernet centripetalnet
cornernet:预测图片上所有物体的左上角、右下角,然后后处理时再组合在一起。
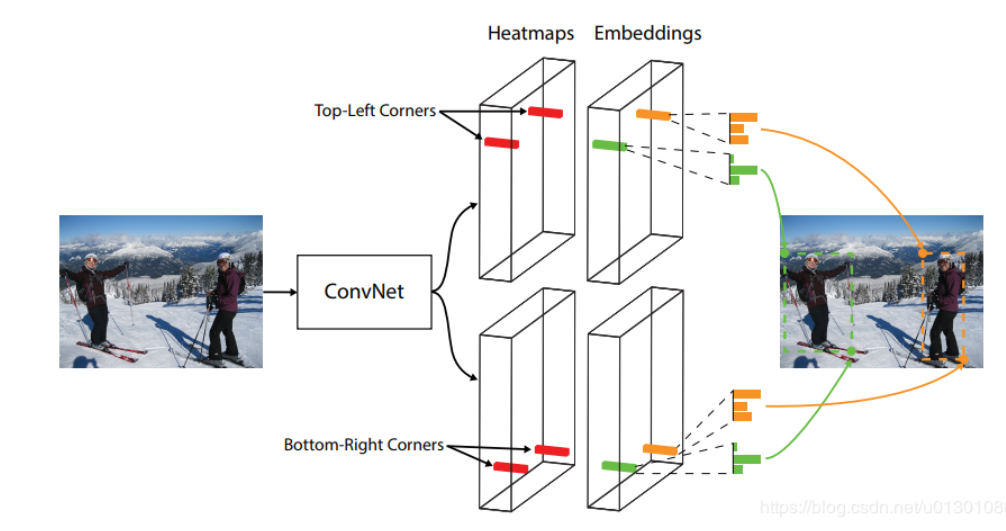
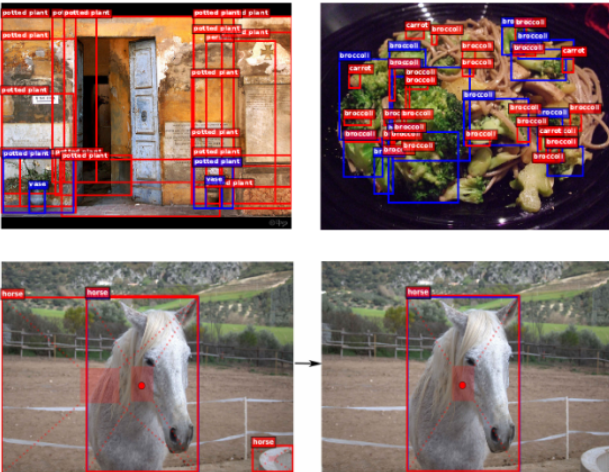
经过backbone的采集特征(这里使用hourglass network)后使用bottom-up结构,分别预测目标的左上角点和右下角点,通过embedding匹配响应角点。但是此类算法有一个缺点就是经常检测错角点
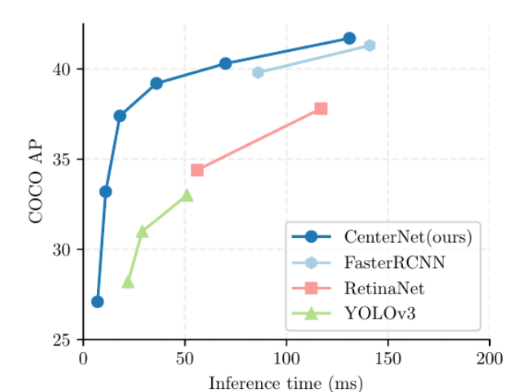
CenterNet:是一个不使用NMS的结构,预测目标的中心点,因此不需要像上面那样再进行配对,算法速度也得到了极大提升。
centripetalnet:https://mp.weixin.qq.com/s/8IYGkaJxWy2xAEmlgXikow
这篇中了cvpr 2020,算得上是目前最优秀的目标检测框架了
写在最后的话:
从刚开始随随便便看论文、看博客也差不多快一个月了,我发现其实我对这方面的进步其实并不大。总结了以下原因:
- 看论文不能完完全全看下来,总是看别人写的博客,只注重作者的操作,没有想作者为什么要这样改进
- 看论文只看前半部分,对于损失函数和回归问题其实并不完全理解
- 没有及时总结和实践,所以写博客时有一种讲不出来的感觉(就像 热评就在眼前,sao话却说不出口 的难受)
希望自己在接下来的一个月内稳下心来,获得一些突破!
最后
以上就是大力棒球最近收集整理的关于小白学习object detection的一些感受的全部内容,更多相关小白学习object内容请搜索靠谱客的其他文章。








发表评论 取消回复