作者 | 杨阳
整理 | NewBeeNLP
https://zhuanlan.zhihu.com/p/365662727
在深度学习时代,训练数据特别大的时候想要单卡完成训练基本是不可能的。所以就需要进行分布式深度学习。在此总结下个人近期的研究成果,欢迎大佬指正。
主要从以下几个方面进行总结:
分布式训练的基本原理
TensorFlow的分布式训练
PyTorch的分布式训练框架
Horovod分布式训练
1、分布式训练的基本原理
无论哪种机器学习框架,分布式训练的基本原理都是相同的。本文主要从 并行模式、架构模式、同步范式、物理架构、通信技术 等五个不同的角度来分类。
1.1 并行模式
分布式训练的目的在于将原本巨大的训练任务拆解开撑多个子任务,每个子任务在独立的机器上单独执行。大规模深度学习任务的难点在于:
训练数据巨大:这种情况我们需要将数据拆解成多个小模型分布到不同的node上
训练模型的参数巨大(NLP的预训练模型实在太大了):这种情况我们需要将数据集拆解分布到不同的node上。
前者我们称之为数据并行,后者我们称之为模型并行。
1.1.1 数据并行
数据并行相对简单, N个node(也称为worker)构成一个分布式集群,每个worker处理1/N的数据。理论情况下能达到线性的加速效果。TF、torch、Horovod都可以在原生支持或者微小的改动实现数据并行模式。
数据并行是在每个worker上存储一个模型的备份,在各个worker 上处理不同的数据子集。然后需要规约(reduce)每个worker的结果,在各节点之间同步模型参数。这一步会成为数据并行的瓶颈,因为如果worker很多的情况下,worker之间的数据传输会有很大的时间成本。参数同步后,需要采用不同的方法进行参数更新:
参数平均法
更新式方法
参数平均法是最简单的一种数据平均化。若采用参数平均法,训练的过程如下所示:基于模型的配置随机初始化网络模型参数
将当前这组参数分发到各个工作节点
在每个工作节点,用数据集的一部分数据进行训练
将各个工作节点的参数的均值作为全局参数值
若还有训练数据没有参与训练,则继续从第二步开始
更新式方法 与参数平均化类似,主要区别在于,在参数服务器和工作服务器之间传递参数时,更新式方法只传递更新信息(梯度和张量)。
1.1.2 模型并行
模型并行 相对复杂,原理是分布式系统中的不同worker负责网络模型的不同部分。
例如说,神经网络的不同层被分布到不同worker或者同一层的不同参数被分配到不同worker上。对于TF这种框架,可以拆分计算图成多个最小依赖子图到不同的worker上。同时在多个子图之间通过通信算子来实现模型并行。但是这种实验 起来比较复杂。工业界还是以数据并行为主。
Model Parallel主要分两种:intra-layer拆分 和inter-layer拆分
intranet-layer拆分 :深度学习的网络结构基本都是一层一层的。常规的卷积、池化、BN等等。如果对某一层进行了拆分,那么就是intra-layer拆分。对单层的拆分其实就是拆分这一层的matrix运算。参考论文: Megatron-LM: Training Multi-Billion Parameter Language Models Using Model Parallelism
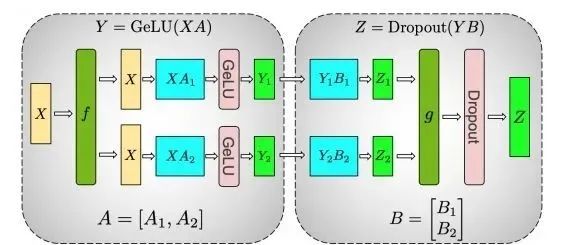
如上图,这两层的运算是 , ,matrix运算有一个重要的性质是矩阵运算可以分块运算。因此如上可以拆分成:
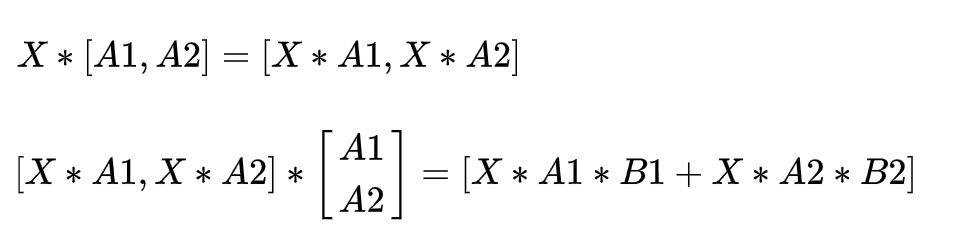
因此拆分为一个worker计算 ,一个worker计算 ,最后再累加两个worker的结果。这在一定程度上减少了模型对计算资源的需求。
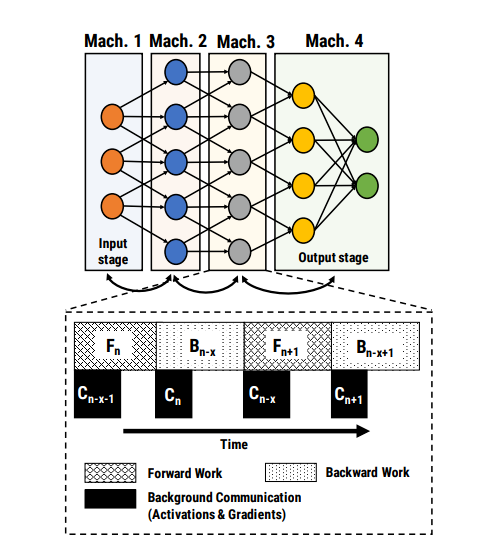
inter-layer拆分 :这中更好理解,对模型做网络上的拆分。将每一层或者某几层放在一个worker上单独训练。这种拆分的问题在于,模型训练是串行的,整个模型的效率取决于最慢的那一层,存在资源浪费。参考论文: PipeDream: Fast and Efficient Pipeline Parallel DNN Training
但是随着训练设备的增加,多个worker之间的通信成本增加,模型Reduce的成本也越来越大,数据并行的瓶颈也随之出现。故有学者提出混合并行(数据并行+模型并行)。本人对此暂无研究,感兴趣可自行摸索,参考此链接[1]
强推这篇paper,DP(Data Parallel)、MP(MOdel Parallel)、PP(Pipeline Parallel)各个方面讲的很透彻: ZeRO: Memory Optimizations Toward Training Trillion Parameter Models
1.2 架构模式
分布式训练上会频繁的应用到规约(AllReduce)操作。主流的分布式架构主要分为 参数服务器(ParameterServer) 和 基于规约(Reduce) 两种模式。早期还有基于MPI的方式,不过现在已经很少用了。
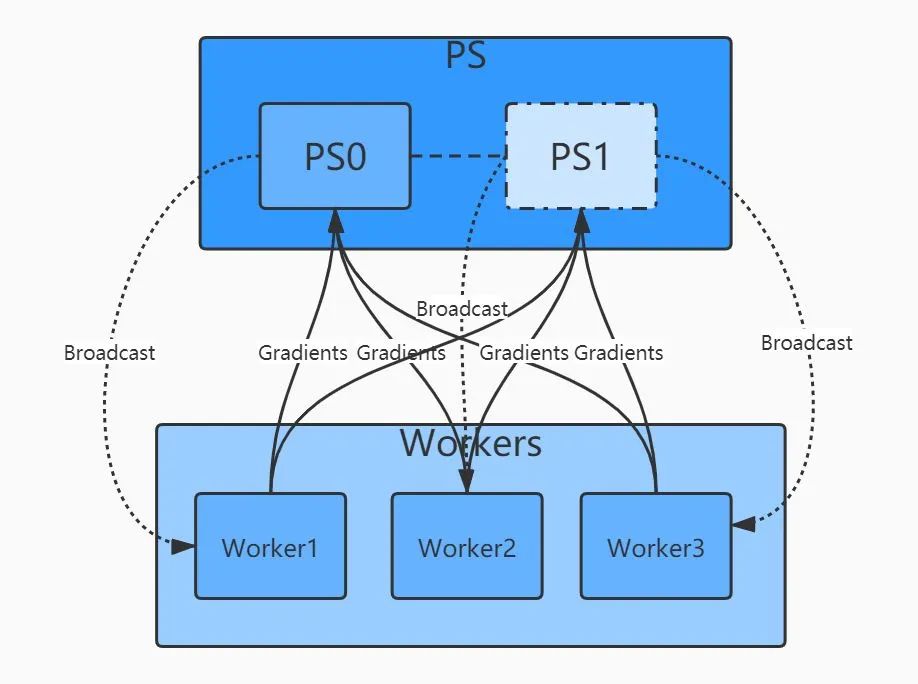
ParameterServer模式是一种基于reduce和broadcat算法的经典架构。其中一个/一组机器作为PS架构的中心节点,用来存储参数和梯度。在更新梯度的时候,先全局reduce接受其他worker节点的数据,经过本地计算后(比如参数平均法),再broadcast回所有其他worker。PS架构的问题在于多个worker与ps通信,PS本身可能存在瓶颈。随着worker数量的增加,整体通信量也线性增加,加速比也可能停滞在某个点位上。
基于规约的模式解决了上述的问题,最典型的是百度提出的Ring-AllRuduce。多个Worker节点连接成一个环,每个Worker依次把自己的梯度同步给下一个Worker,经过至多2*(N-1)轮同步,就可以完成所有Worker的梯度更新。这种方式下所有节点的地位是平等的,因此不存在某个节点的负载瓶颈,随着Worker的增加,整体的通信量并不随着增加。加速比几乎可以跟机器数量成线性关系且不存在明显瓶颈。目前,越来越多的分布式训练采用Reduce这种模式。Horovod中主要就是用的这种分布式架构。
更多关于reduce的算法[2]可参照进一步学习
1.3 同步范式
在实际的训练过程中可能各种问题,比如:部分节点资源受限、卡顿、网络延时等等,因此再梯度同步时就存在“木桶”效应,即集群中的某些worker比其他worker更慢,导致整个训练pipeline需要等待慢的worker,整个集群的训练速度受限于最慢机器的速度。
因此梯度的同步有 同步(sync) 、 异步(Async) 和 混合 三种范式。
同步范式就是上述提到的,只有所有worker完成当前的计算任务,整个集群才会开始下一次迭代。(TF中同步范式使用SyncReplicasOptimizer优化器)
异步模式刚好相反,每个worker只关心知己的进程,完成计算后就尝试更新,能与其他多个worker同步梯度完成取决于各worker当前时刻的状态。其过程不可控,有可能出现模型正确性问题。(可在训练时logging对比)
混合范式结合以上两种情况,各个worker都会等待其他worker的完成,但不是永久等待,有timeout的机制。如果超时了,则此情况下相当于异步机制。并且没来得及完成计算的worker,其梯度则被标记为“stale”而抛弃或另做处理。
1.4 物理架构
物理架构主要是“GPU”架构,就是常说的(单机单卡、单机多卡、多机单卡、多机多卡)
单机单卡:常规操作
单机多卡:利用一台GPU上的多块GPU进行分布式训练。数据并行和模型并行皆可。整个训练过程一般只有一个进程,多GPU之间的通信通过多线程的方式,模型参数和梯度在进程内是共享的(基于NCCL的可能不大一样)。这种情况下基于Reduce的架构比PS架构更合适一些,因为不需要一个显式的PS,通过进程内的Reduce即可完成梯度同步。
多机单卡:操作上与多机多卡基本一致
多机多卡:多机多卡是最典型的分布式架构,所以它需要较好的进程间的通讯机制(多worker之间的通信)。
1.5 通信技术
分布式条件下的多进程、多worker之间的通信技术,常见的主要有:MPI、NCCL,GRPC等。
MPI主要是被应用在超算等大规模计算领域,机器学习场景下使用较少。主要是openMPI原语等。
NCCL是NVIDIA针对GPU设计的一种规约库,可以实现多GPU间的直接数据同步,避免内存和显存的,CPU和GPU间的数据拷贝成本。当在TensorFlow中选择单机多卡训练时,其默认采用的就是NCCL方式来通信。
GRPC是比较成熟的通信技术了,spark等框架内也都有用到。
这一部分暂无研究,有兴趣的大佬自行学习。
OK,讲完了理论部分,那就开始实践吧。
2、TensorFlow的分布式训练
TensorFlow主要的分布式训练的方法有三种:
Customer Train Loop
Estimator + Strategy
Keras + Strategy
在实际的开发工作中,分布式的工作最好是交给框架,而工程师本身只需要关注任务模型的pipeline就行了。最经典的是Spark框架,工程师只需要关注数据处理的workflow,分布式的大部分工作都交给框架。深度学习的开发同样如此。
第一种方式太过原生,整个分布式的训练过程完全交给工程师来处理,代码模块比较复杂,这里不做赘述。
第二种方式,Estimator是TF的一个高级API,在分布式场景下,其最大的特点是单机和分布式代码一致,且不需要考虑底层的硬件设施。在这里不多做介绍。Strategy是tensorflow根据分布式训练的复杂性,抽象出的多种分布式训练策略。TF1.x和TF2.x接口变化较大,不同版本名字可能不一样,以实际使用版本为准。用的比较多的是:
MirroredStrategy:适用于单机多卡、数据并行、同步更新的分布式训练,采用Reduce的更新范式,worker之间采用NCCL进行通信。
MultiWorkerMirroredStrategy:与上面的类似,不同的是这种策略支持多机多卡、数据并行、同步更新的分布式策略、Reduce范式。在TF 1.15版本里,这个策略叫CollectiveAllReduceStrategy。
ParameterServerStrategy:经典的PS架构,多机多卡、数据并行、同步/异步更新
使用Estimator+Strategy 实现分布式训练[3],参考代码
第三种方式 Keras + Strategy[4] 是Tensorflow最新官方推荐的方案。主要是利用keras的高级API,配合Strategy实现多模式的分布式训练。
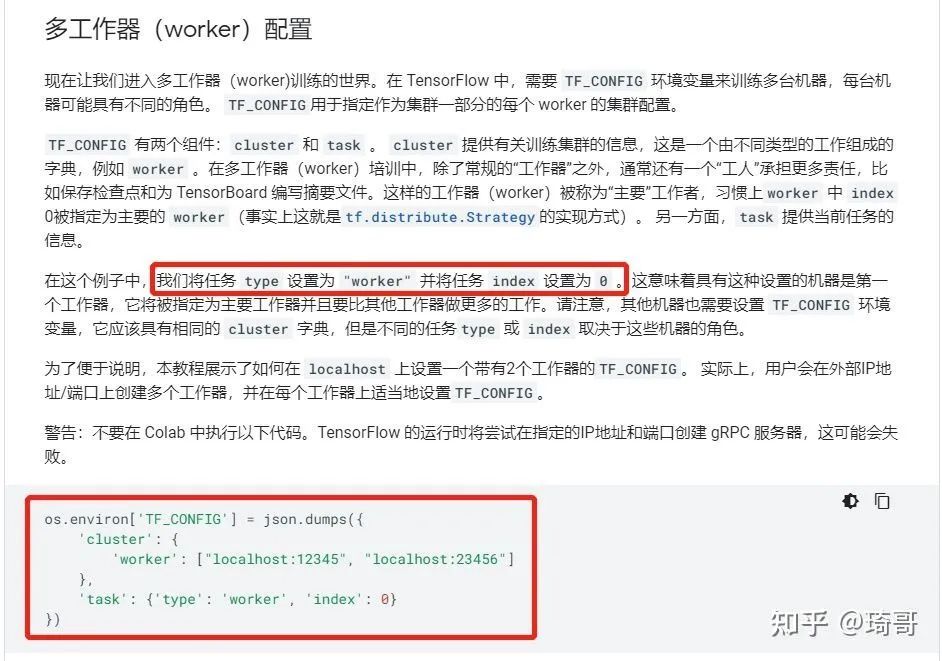
后两种方法都需要传入TF_CONFIG参数,没有就是单机的训练方式。Strategy会自动读取环境变量并应用相关信息。TF_CONFIG的配置如下:
执行脚本示例:
# 分别在各个worker上执行对应的脚本
TF_CONFIG='{"cluster":{"worker":["172.26.0.124:9920","172.26.0.126:9920","172.26.0.127:9920"]},"task":{"index":0,"type":"worker"}}' python multi_worker_with_estimator.py
TF_CONFIG='{"cluster":{"worker":["172.26.0.124:9920","172.26.0.126:9920","172.26.0.127:9920"]},"task":{"index":1,"type":"worker"}}' python multi_worker_with_estimator.py
TF_CONFIG='{"cluster":{"worker":["172.26.0.124:9920","172.26.0.126:9920","172.26.0.127:9920"]},"task":{"index":2,"type":"worker"}}' python multi_worker_with_estimator.py3、Pytorch的分布式训练
相对Tensorflow,Pytorch简单的多。分布式训练主要有两个API:
DataParallel(DP):PS模式,会有一张卡为reduce(parame server),实现简单,就一行代码
DistributedDataParallel(DDP):All-Reduce模式,单机多卡/多级多卡皆可。官方建议API
1、DP:会将数据分割到多个GPU上。这是数据并行的典型,需要将模型复制到每个GPU上,并且一但GPU0计算出梯度,则需要同步梯度,这需要大量的GPU数据传输(类似PS模式);2、DDP:在每个GPU的进程中创建模型副本,并只让数据的一部分对改GPU可用。因为每个GPU中的模型是独立运行的,所以在所有的模型都计算出梯度后,才会在模型之间同步梯度(类似All-reduce)。DDP每个batch只需要一次数据传输;而DP可能存在多次数据同步(不用worker之间可能快慢不一样)。
3.1、DataParallel
import torch
import torch.nn as nn
from torch.autograd import Variable
from torch.utils.data import Dataset, DataLoader
import os
input_size = 5
output_size = 2
batch_size = 30
data_size = 30
class RandomDataset(Dataset):
def __init__(self, size, length):
self.len = length
self.data = torch.randn(length, size)
def __getitem__(self, index):
return self.data[index]
def __len__(self):
return self.len
rand_loader = DataLoader(dataset=RandomDataset(input_size, data_size),
batch_size=batch_size, shuffle=True)
class Model(nn.Module):
# Our model
def __init__(self, input_size, output_size):
super(Model, self).__init__()
self.fc = nn.Linear(input_size, output_size)
def forward(self, input):
output = self.fc(input)
print(" In Model: input size", input.size(),
"output size", output.size())
return output
model = Model(input_size, output_size)
if torch.cuda.is_available():
model.cuda()
if torch.cuda.device_count() > 1:
print("Let's use", torch.cuda.device_count(), "GPUs!")
# 就这一行!!!!
model = nn.DataParallel(model)
for data in rand_loader:
if torch.cuda.is_available():
input_var = Variable(data.cuda())
else:
input_var = Variable(data)
output = model(input_var)
print("Outside: input size", input_var.size(), "output_size", output.size())3.2、DDP
官方建议使用DDP,采用All-Reduce架构,单机多卡、多机多卡都能用。
需要注意的是:DDP并不会自动shard数据
如果自己写数据流,得根据torch.distributed.get_rank()去shard数据,获取自己应用的一份
如果用Dataset API,则需要在定义Dataloader的时候用 DistributedSampler去shard
sampler = DistributedSampler(dataset) # 这个sampler会自动分配数据到各个gpu上
DataLoader(dataset, batch_size=batch_size, sampler=sampler)完整代码如下:
import torch
import torch.nn as nn
from torch.autograd import Variable
from torch.utils.data import Dataset, DataLoader
import os
from torch.utils.data.distributed import DistributedSampler
# 1) 初始化
torch.distributed.init_process_group(backend="nccl")
input_size = 5
output_size = 2
batch_size = 30
data_size = 90
# 2) 配置每个进程的gpu
local_rank = torch.distributed.get_rank()
torch.cuda.set_device(local_rank)
device = torch.device("cuda", local_rank)
class RandomDataset(Dataset):
def __init__(self, size, length):
self.len = length
self.data = torch.randn(length, size).to('cuda')
def __getitem__(self, index):
return self.data[index]
def __len__(self):
return self.len
dataset = RandomDataset(input_size, data_size)
# 3)使用DistributedSampler
rand_loader = DataLoader(dataset=dataset,
batch_size=batch_size,
sampler=DistributedSampler(dataset))
class Model(nn.Module):
def __init__(self, input_size, output_size):
super(Model, self).__init__()
self.fc = nn.Linear(input_size, output_size)
def forward(self, input):
output = self.fc(input)
print(" In Model: input size", input.size(),
"output size", output.size())
return output
model = Model(input_size, output_size)
# 4) 封装之前要把模型移到对应的gpu
model.to(device)
if torch.cuda.device_count() > 1:
print("Let's use", torch.cuda.device_count(), "GPUs!")
# 5) 封装
model = torch.nn.parallel.DistributedDataParallel(model,
device_ids=[local_rank],
output_device=local_rank)
for data in rand_loader:
if torch.cuda.is_available():
input_var = data
else:
input_var = data
output = model(input_var)
print("Outside: input size", input_var.size(), "output_size", output.size())执行脚本:
CUDA_VISIBLE_DEVICES=0,1 python -m torch.distributed.launch --nproc_per_node=2 torch_ddp.pyapex加速(混合精度训练、并行训练、同步BN)[5] 可参考:https://zhuanlan.zhihu.com/p/158375055
4、Horovod分布式训练
Horovod是Uber开源的跨平台的分布式训练工具,名字来自于俄国传统民间舞蹈,舞者手牵手围成一个圈跳舞,与Horovod设备之间的通信模式很像,有以下几个特点:
兼容TensorFlow、Keras和PyTorch机器学习框架。
使用Ring-AllReduce算法,对比Parameter Server算法,有着无需等待,负载均衡的优点。
实现简单,五分钟包教包会。
Horovod环境准备以及示例代码[6],可参考作者另一篇文章
一起交流
想和你一起学习进步!『NewBeeNLP』目前已经建立了多个不同方向交流群(机器学习 / 深度学习 / 自然语言处理 / 搜索推荐 / 图网络 / 面试交流 / 等),名额有限,赶紧添加下方微信加入一起讨论交流吧!(注意一定o要备注信息才能通过)

本文参考资料
[1]
此链接: https://help.aliyun.com/document_detail/194800.html
[2]reduce的算法: https://zhuanlan.zhihu.com/p/79030485
[3]使用Estimator+Strategy 实现分布式训练: https://github.com/kubeflow/tf-operator/blob/master/examples/v1/distribution_strategy/estimator-API/keras_model_to_estimator.py
[4]Keras + Strategy: https://github.com/kubeflow/tf-operator/blob/master/examples/v1/distribution_strategy/keras-API/multi_worker_strategy-with-keras.py
[5]apex加速(混合精度训练、并行训练、同步BN): https://zhuanlan.zhihu.com/p/158375055
[6]Horovod环境准备以及示例代码: https://zhuanlan.zhihu.com/p/351693076
[7]分布式机器学习系统笔记: https://www.cnblogs.com/yihaha/p/7265280.html
[8]炼丹师的工程修养之四:TensorFlow的分布式训练和K8S: https://zhuanlan.zhihu.com/p/56699786
[9]分布式训练】单机多卡的正确打开方式(三):PyTorch: https://zhuanlan.zhihu.com/p/74792767

最后
以上就是老实过客最近收集整理的关于聊一聊深度学习分布式训练的全部内容,更多相关聊一聊深度学习分布式训练内容请搜索靠谱客的其他文章。








发表评论 取消回复